这里写目录标题
STM32资料包:
百度网盘下载链接:链接:https://pan.baidu.com/s/1mWx9Asaipk-2z9HY17wYXQ?pwd=8888
提取码:8888
1、函数编辑
(1)主函数编辑
基于STM32的检测定时器超时状态并翻转LED的状态,同时检测AD按键状态并输出按下的按键编号到串口。
步骤2:主函数main.c循环函数编写
#include "bord.h"
//数码管显示断码 0~9 .
uint8_t NixiteShow[12]= {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x80,0x00}; //共阴
/*********************************************************************
@Function : 程序入口
@Parameter : N/A
@Return : N/A
**********************************************************************/
int main(void)
{
uint8_t i;
delay_init(); //启动滴答定时器
usart1_init(9600); //USART1初始化
LED_Init(); //板载LED初始化
SystemTinerInit(1000-1,7200-1); //系统时间初始化 定时100ms
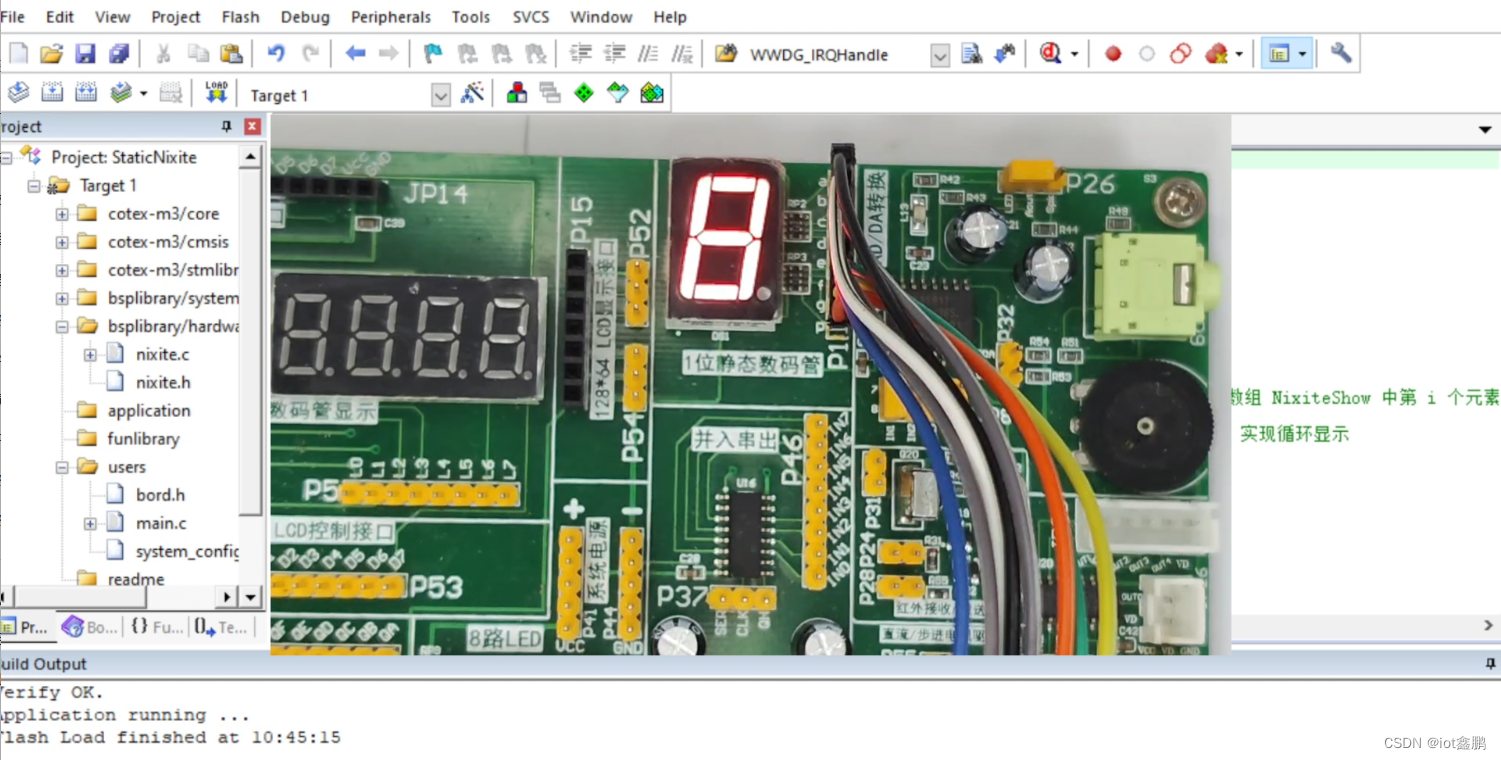
StaticNixiteInit();
printf("初始化成功!\r\n");
while(1)
{
if(WaitTimerOut(5))
{
SetStaticNixite(NixiteShow[i]); // 如果等待定时器 5 到达超时时间,设置数码管显示为数组 NixiteShow 中第 i 个元素的值
i += 1; // 将 i 自增,准备显示下一个元素
if(i == 13) i = 0; // 如果 i 达到数组的最大索引(13),将 i 重置为 0,实现循环显示
}
}
}
(2)主函数头文件函数(bord.h)
#ifndef __BORD_H_
#define __BORD_H_
#include "system_config.h"
//头文件包含
/*************SYSTEM*****************/
/*#include ".\sys\sys.h"*/
#include ".\delay\delay.h"
#include ".\usart\usart.h"
#include ".\timer\timer.h"
/***********Hardweare***************/
#include ".\led\led.h"
#include ".\nixite\nixite.h"
/***********Funlibrary***************/
#endif
(3)静态数码管源文件(nixite.c)
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include ".\nixite\nixite.h"
#include ".\sys\sys.h"
/*********************************************************************
@Function : 开发板静态数码管 IO初始化
@Parameter : N/A
@Return : N/A
**********************************************************************/
void StaticNixiteInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure; // 定义 GPIO 初始化结构体变量
// 使能 GPIOA 的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// 配置 GPIO 引脚
GPIO_InitStructure.GPIO_Pin = GPIO_ALL_PINS; // 设置要配置的 GPIO 引脚,此处为 GPIOA 的所有引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 设置引脚为推挽输出模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 设置引脚输出速度为 50MHz
// 初始化 GPIOA 的引脚配置
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 将 GPIOA 的所有引脚置低,关闭数码管的显示
GPIO_ResetBits(GPIOA, GPIO_ALL_PINS);
}
/*********************************************************************
@Function : 开发板静态数码管显示
@Parameter : show :显示的段码
@Return : N/A
**********************************************************************/
void SetStaticNixite(uint8_t show)
{
uint8_t i, temp;
temp = show; // 将传入的显示值存储在临时变量 temp 中
// 循环处理每一位数字
for(i = 0; i < 8; i++)
{
if(temp & 0x01)
PAout(i) = 1; // 如果 temp 的最低位为 1,则将对应的 PAout(i) 设置为高电平(1)
else
PAout(i) = 0; // 如果 temp 的最低位为 0,则将对应的 PAout(i) 设置为低电平(0)
temp >>= 1; // 将 temp 右移一位,准备处理下一位数字
}
}
(4)静态数码管源文件(nixite.h)
#ifndef __NIXITE_H_
#define __NIXITE_H_
#include <stdint.h>
/* 宏定义 */
#define GPIO_ALL_PINS (GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3 | \
GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7)
/* 函数声明 */
void StaticNixiteInit(void);
void SetStaticNixite(uint8_t show);
#endif
2、知识链接
(1)数码管共阴共阳的区别
共阴极和共阳极数码管的区别在于电极连接方式。
共阴极数码管的阴极(即数码管的段)连接到地(GND),控制共阴极数码管时,需要将对应的位引脚设置为高电平以点亮数字;
阳极(即数码管的位)需要通过给定的电压(通常是正电源)来点亮对应的数码管,在共阳极数码管中,阳极连接到正电源,而阴极需要连接到地才能点亮数码管。因此,而控制共阳极数码管时,需要将对应的阴极引脚设置为低电平以点亮数字;
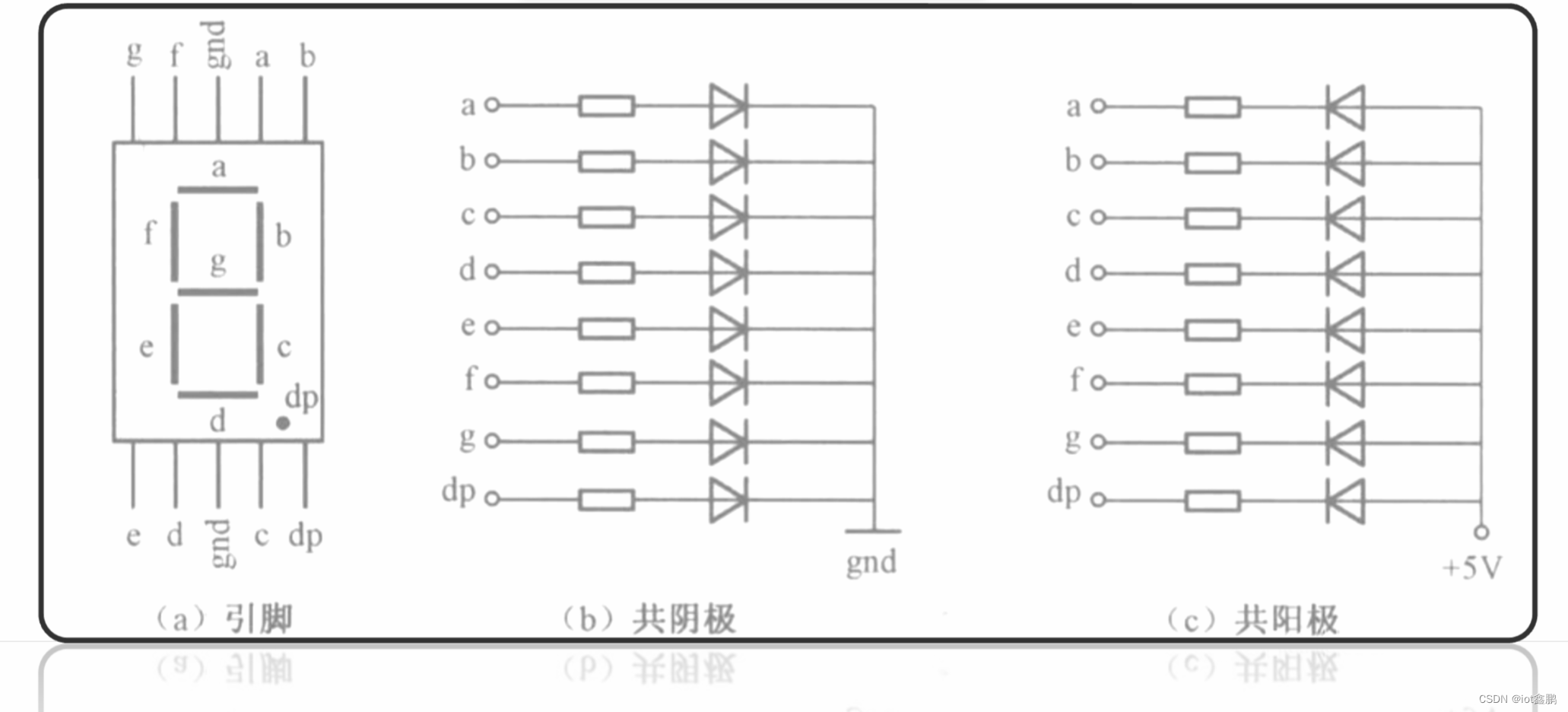
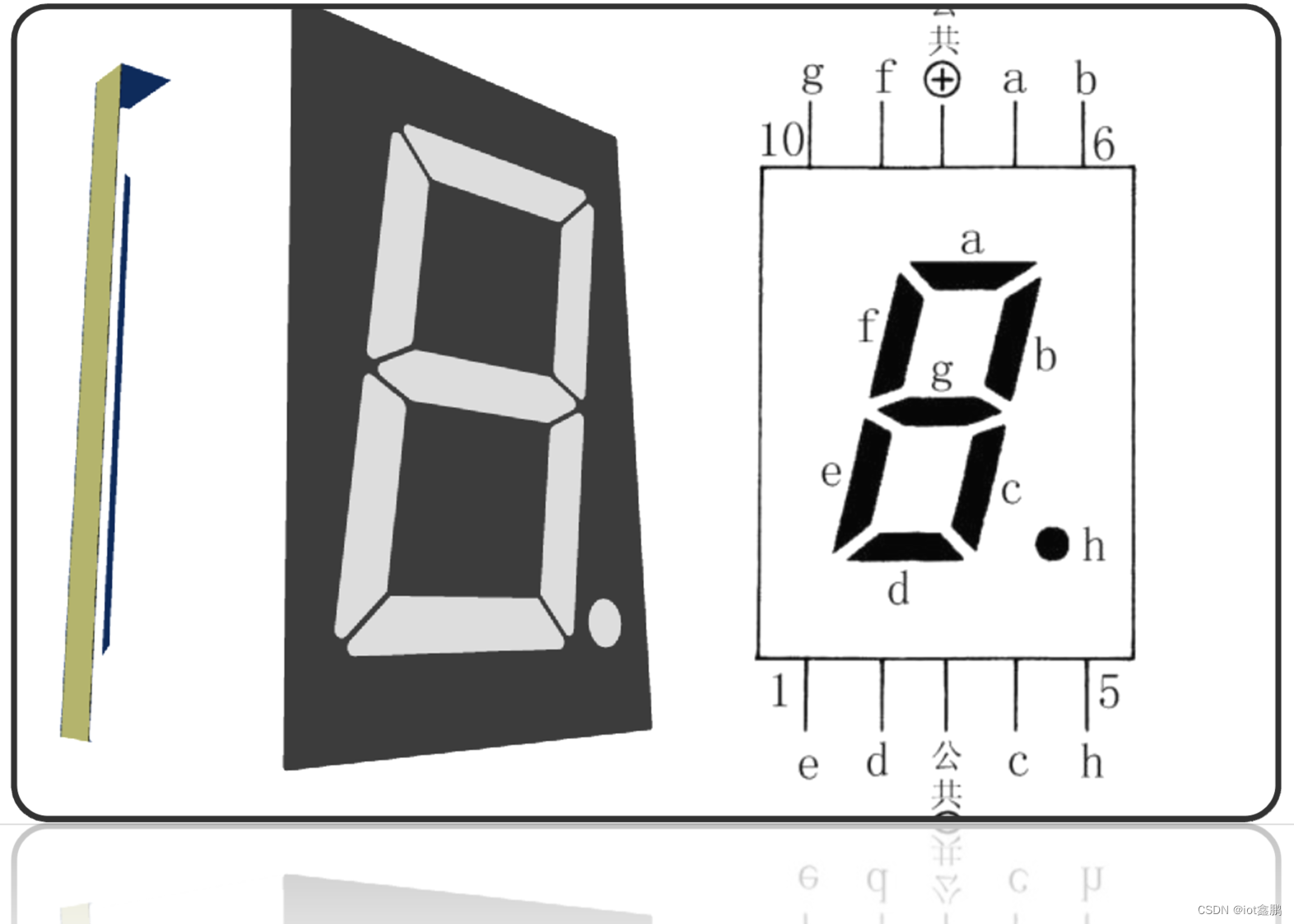
(2)数码管原理
数码管由七个独立控制的LED段组成,分别标记为 a, b, c, d, e, f, g。通过控制这些段的点亮或熄灭状态,可以显示数字 0-9、部分字母和特殊符号。共阴极数码管中,将阴极连接到地(GND),给对应的阳极施加正电压可点亮相应段;共阳极数码管中,阳极连接到正电源,将阴极接地可点亮相应段
3、工程测试