文章目录
前言
VTOL QuikTune Lua 脚本简化了为多旋翼飞行器的姿态控制参数寻找最佳调整的过程。
脚本会缓慢增加相关增益,直到检测到振荡。然后,它将增益降低 60%,并进入下一个增益。所有增益调整完毕后,用户可以决定保存或放弃新增益。
!Note
请确保你已通过设置此处讨论的参数为飞机调试做好准备:设置飞机进行调试(Setting the Aircraft Up for Tuning)。此外,为确保最佳调优,请设置噪声陷波滤波器,请参阅使用动态谐波陷波滤波器管理陀螺仪噪声(Managing Gyro Noise with the Dynamic Harmonic Notch Filters)。如果飞行器无法进行稳定的初始悬停,你可以不经此步骤运行 QuickTune 以获得初始微调,请参阅手动调整滚动和俯仰(Manual tuning of Roll and Pitch)。然后设置滤波器并重新调整以获得最佳效果。
脚本会尝试调整所有这些参数(按照给定的顺序)。
- ATC_RAT_RLL_D
- ATC_RAT_RLL_P and ATC_RAT_RLL_I
- ATC_RAT_PIT_D
- ATC_RAT_PIT_P and ATC_RAT_PIT_I
- ATC_RAT_YAW_D
- ATC_RAT_YAW_P and ATC_RAT_YAW_I
与 AutoTune 相比,QuikTune 的优点是更安全,因为飞行器不需要移动或抽动。缺点是 QuikTune 无法找到飞行器的最大旋转加速度(例如 ATC_ACCEL_R_MAX、ATC_ACCEL_P_MAX、ATC_ACCEL_Y_MAX)。
1 安装脚本
- 设置 SCR_ENABLE = 1 以启用脚本,然后重启自动驾驶仪;
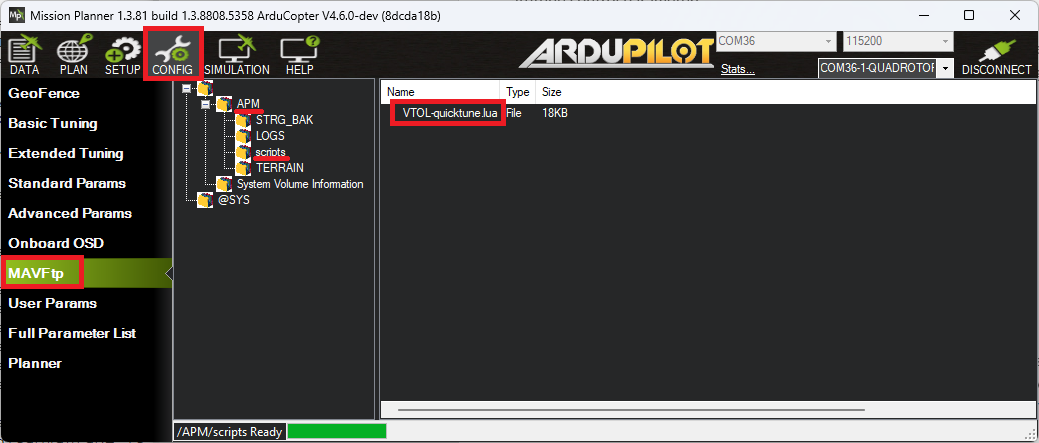
- 将 VTOL-quicktune.lua 下载到你的电脑;
- 将脚本复制到自动驾驶仪 SD 卡的 APM/scripts 目录中。如果使用 MP,使用"配置"、"MAVFtp"屏幕可能最简单;
- 重启自动驾驶仪并设置 QUIK_ENABLE = 1;
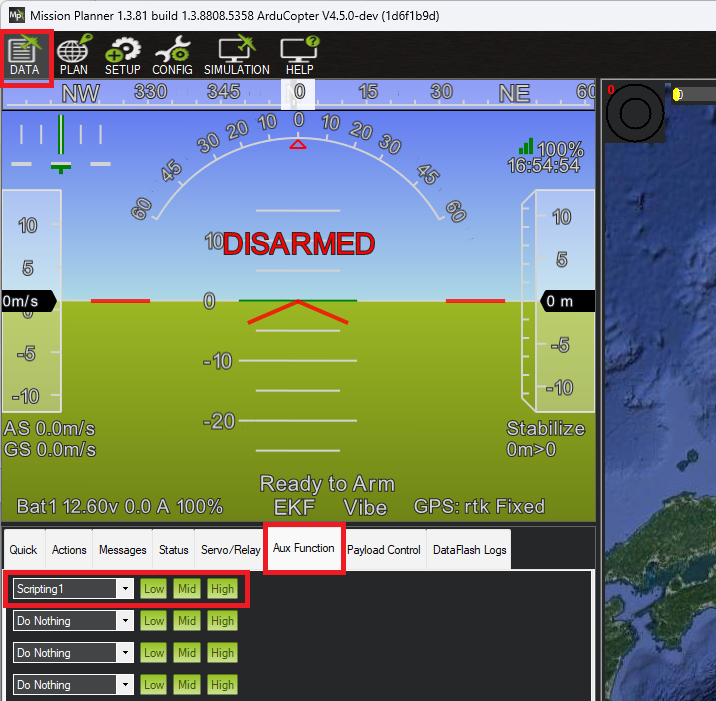
- 如果将使用遥控开关启动/停止调试,则设置 RCx_OPTION = 300,其中"x"为遥控输入通道编号。或者将任务规划器辅助功能选项卡中的一行设置为 "脚本1"。
2 运行 QuikTune
- 等待风平浪静的日子,前往 GPS 接收良好的开阔地;
- 连接地面站(如 Mission Planner 或 QGC),确保可以看到"信息"选项卡。调谐器的输出将显示在这里;
- 将 RC 开关移至低位置,或按下 MP 辅助功能的"低"按钮;
- 以 Loiter 模式解锁和起飞,并爬升至约 3m 的高度;
- 将 RC 开关移至中间位置,或按下 MP 辅助功能的"Mid"按钮,开始调优;
- 使用 GCS 的 "信息"选项卡监控调优进度;
- 必要时使用遥控发射器重新定位飞行器。这将暂时中止调优并恢复原始增益。遥控杆回到中心位置几秒钟后,调优将重新开始;
- 如果飞行器开始剧烈摆动,将 RC 开关移至低位置或按下 MP 辅助功能的"低"按钮,取消调优;
- 调优完成后,将 RC 辅助开关移至高位或按下 MP 辅助功能的"高"按钮,接受新的增益;
- 降落并加锁飞行器。
3 高级配置
可用参数设置的完整列表如下(parameter settings are here)。