参考:江科大单片机教程 STM32入门教程-2023版 细致讲解 中文字幕_哔哩哔哩_bilibili
| IIC通讯协议 | SPI通信协议 | UART | CAN | USB | |
| 速度 | 100k-400khz | 4Mhz- | |||
| 线数 | 2 CLK,DATA | 4CLK,ENB,IO,OI | |||
| 额外设备 | |||||
| 一主多从 | 一主多从 |
一般不用自己写,都有相应的库或官方提供相应的,改改就行,没有了再去看视频或是从其它处移植过来,改改;
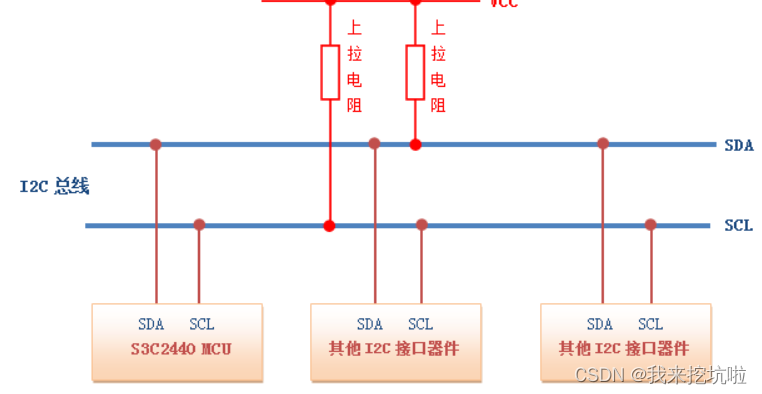
IIC通讯协议
通信时序 发送数据过程 发送地址 接收1位 发送数据 置高 继续接收 继续发送
可以软件模拟
因为多设备,并且只有两条线,因为设备内有多个寄存器,从而数据发送,读写时,需要发送设备地址和设备寄存器地址(连接上地线)
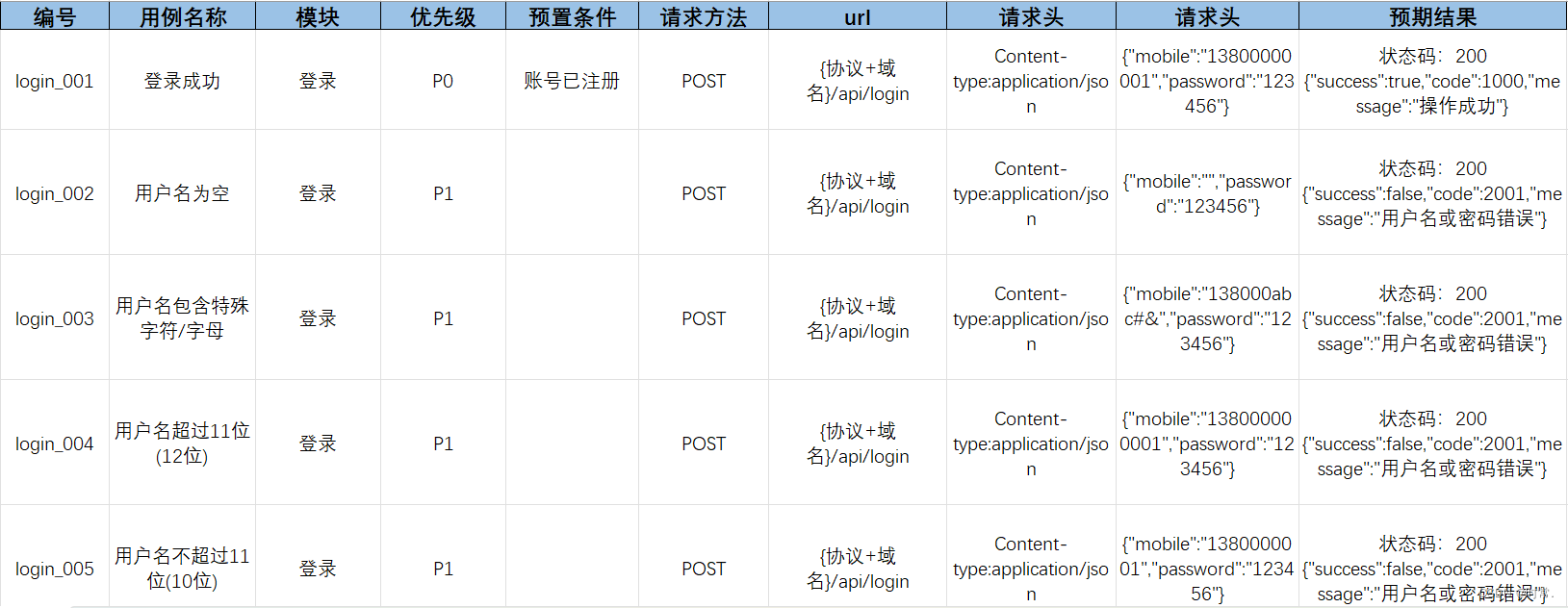
写时序 : 七位设备地址,和一位读写位 ;设备应答后,发送写入的地址,应答后,写入数据
设备地址和内部寄存器地址
读时序:当前地址读;因为地址为当前地址,从而要读特定地址时,要用写时序写入地址,不发送数据,然后发送重新开始信号,再进行读时序
连续写,连续读,只要接收或读取数据后,给出应答,即会连续
一条CLK 一条DATA线
多个设备
因为时钟线为主机控制,所以可以中断停止后再继续接收,发送
SPI通信协议
可以软件模拟(但软件模拟从机时,容易出现丢帧,导致后续数据都是错的。。。但可以用于LCD等
CLK,MOSI,MISO,CS1,CS2,CS3
一对多;多个设备;对设备的选择通过CS1,CS2,CS3的拉底来实现
采用循环发送数据模式;MOSI 发出一位的同时置换回MISO内的一位,直到一个字节发送完,同时也接收了从机的一个字节
读写格式,依不同的设备而定;没有统一的,按具体设备翻看手册
连续读写,只要cs线没断开就可以连续;断开则停止
因为时钟线为主机控制,所以可以中断停止后再继续接收,发送
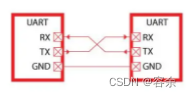
UART通信协议
一对一
TX RX GND
使用内部时钟作为时钟,导致通信双方需要相同的波特率;
因为内部时钟,从而有校验位,为信息传递进行准备性,抗干扰设置
读写协议格式:自已协定
连续读写:连续
TTL电平:+3.3V或+5V表示1,0V表示0
RS232电平:-3~-15V表示1,+3~+15V表示0
RS485电平:两线压差+2~+6V表示1,-2~-6V表示0(差分信号)
——来自江科大:PPT
一般不会使用到,使用到时通常有操作系统,或是驱动已经集成了,只需要使用即可;使用于嵌入式,高效,稳定阶段,有专门的驱动,不需
多设备同时传输,从而需要确定传输方是谁,多人同时传输,只有两线,从而决定,谁先谁后,从而协议;
时钟来源:主设备,还是内部时钟
SPI,UART,I2C 因从设备选择由主机控制,实现主从,从而不需要确定传输方和仲裁先后
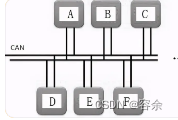
*CAN通信协议(CAN总线入门教程 - 持续更新中_哔哩哔哩_bilibili
需要额外外部电路
一对多,主从可以变化;一发送,其它的接收,
组成网络结构,任何一方皆可发送;其它方接收;发送方切换
信息稳定性,同时传输
从而有仲裁,信息传输正确;从而使用协议验证
传输距离,稳定性
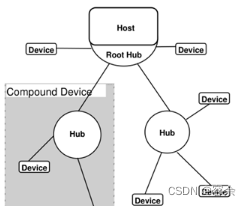
*USB通信协议
差分电路,抗干扰,运输长度
有多设备,从而有总线仲裁,谁先使用
有多设备,从而信息传递中,信息的传输方来源,使用信息符带地址,验证,信息
一,不需要重新写协议,除非你要移植到新出的产品上,(一般也只需要使用原有的修改一下即可,要了解具体的过程的
二,一般都会提供相应的协议的实现的,不需要再
三,具体场景具体使用,不需要使用高的,一般的需求已经满足了,高的用不到——
总结一下
根据主机挂载从机的数量,与选择从机的方式
| uart | i2c | spi | can | USB | |
| 一对一 | 两根线选择所有的从机 | 通过各个cs线选择不同的从机 | 形成网络结构任意一方可成为主机 | 可挂载多个设备 | |
| 只有两个设备地址就不需要了 | 从而需要地址来确定选择哪个设备 | 直接通过csx选择不同的从机,地址可省略了 | 两线,从而需要地 | 一个usb 主机可挂载多个usb设备,D+D-选择,从而需要地址, | |
 |
 |
 |
 |
 |
连线方式
uart
rx->tx tx->rx gnd->gnd
spi
SCL ->SCL ; MISO->MOSI GND->GND
I2C
CLK->CLK; DAT ->DAT
arudino
I2C 协议 与 移植
asrpro
1.添加头文件
2.修改函数
SSD1306 移值
ASRPRO - ssd1306的核心函数 按网上的u8g2移植过程,修改代码如下
uint8_t u8x8_avr_gpio_and_delay(u8x8_t *u8x8, uint8_t msg, uint8_t arg_int, void *arg_ptr)
{
// Re-use library for delays
switch(msg)
{
//ms
case U8X8_MSG_DELAY_MILLI:
delay(1);
break;
//10 us
case U8X8_MSG_DELAY_10MICRO:
delay10us();
break;
//1 ns
case U8X8_MSG_DELAY_NANO:
delay1us();
break;
case U8X8_MSG_DELAY_100NANO:
delay1us();
break;
case U8X8_MSG_GPIO_AND_DELAY_INIT: // called once during init phase of u8g2/u8x8
ssd1306_spi_init();
break; // can be used to setup pins
case U8X8_MSG_GPIO_SPI_CLOCK: // Clock pin: Output level in arg_int
if(arg_int)
digitalWrite(SCK,1);
else
digitalWrite(SCK,0);
break;
case U8X8_MSG_GPIO_SPI_DATA: // MOSI pin: Output level in arg_int
if(arg_int)
digitalWrite(MOSI,1);
else
digitalWrite(MOSI,0);
break;
case U8X8_MSG_GPIO_CS: // CS (chip select) pin: Output level in arg_int
if(arg_int)
digitalWrite(CS,1);
else
digitalWrite(CS,0);
break;
case U8X8_MSG_GPIO_DC: // DC (data/cmd, A0, register select) pin: Output level in arg_int
if(arg_int)
digitalWrite(DC,1);
else
digitalWrite(DC,0);
break;
case U8X8_MSG_GPIO_RESET: // Reset pin: Output level in arg_int
default:
break;
}
return 1;
}
*PCA9865
*使用官方的softiic修改下发送地址 地址即可 左移一位 0,1( 读写?)