Quad-SPI启动是一种高效的闪存启动方式,它利用Quad-SPI接口的高速数据传输能力来加速启动过程。Quad-SPI(四路串行外设接口)是一种改进的SPI(串行外设接口)协议,通过使用四条数据线而不是传统的单条数据线,实现了更高的数据传输速率。
1 特点
Quad-SPI 启动的主要特点有:
• 支持x1、x2和x4单设备配置。这些配置允许用户根据具体的存储需求和性能要求,灵活选择Quad-SPI接口的宽度。
• 支持双SS(Slave Select,从设备选择)、8位并行I/O设备配置。这种配置提供了更高的数据传输速率和更大的存储容量,适用于需要高速数据访问的应用。
• 支持双SS、4位堆叠I/O配置。这种配置可以在保持高数据传输速率的同时,减少引脚数量,降低硬件成本。
• 就地执行(Execute-in-place)选项。这允许直接从Quad-SPI Flash存储器中执行代码,无需先将其复制到其他内存区域,从而提高了系统启动速度和效率。
此外,在使用Quad-SPI Boot时,还需要注意以下几点:
• 虽然支持双SS、4位堆叠I/O设备配置,但BootROM仅在前16MB地址范围内进行搜索。BootROM访问连接到QSPI0_SS_B从设备选择信号的设备。
• 在Quad-SPI启动的情况下,如果需要验证映像,则启动映像应放置在除0x0之外的32K偏移量处(启动映像不应从0x0偏移量开始放置在Quad-SPI中)。
• 当使用超过16MB的Flash存储器时,存在特殊的复位要求。
• 当使用大于16MB的QSPI和RSA身份验证时,存在特定的启动映像要求。
总的来说,Quad-SPI Boot为嵌入式系统提供了高效、灵活的启动解决方案,可以满足各种应用场景的需求。
2 I/O配置检测
BootROM可以使用宽度检测(Width Detection,值为0xAA995566)参数值来检测Quad-SPI接口的预期I/O宽度。在8位并行的情况下,还会使用映像标识(Image Identification,值为0x584C4E58)参数值来进行检测。
2.1 4位I/O检测
在Quad-SPI启动过程中,BootROM会将控制器配置为4位I/O。这种配置包括单个设备和双4位堆叠的情况。BootROM以x1模式读取第一个(可能也是唯一的)Quad-SPI设备,并读取BootROM Header中的宽度检测参数。如果宽度检测参数等于0xAA995566,那么BootROM就假定找到了一个请求4位I/O配置的有效Header。这可能是一个设备,也可能是双4位堆叠配置。在后一种情况下,BootROM总是忽略第二个设备,但用户代码可以访问它。在x1模式下读取宽度检测参数后,BootROM会尝试在x4模式下读取该参数。如果x4模式失败,它会尝试x2模式。之后,BootROM会使用支持的最宽I/O总线宽度来访问Quad-SPI设备。
通过这种方式,BootROM能够智能地确定并配置Quad-SPI接口的I/O宽度,从而确保与连接的存储设备的正确通信。
2.2 8位I/O检测
BootROM还可以查找双设备和8位并行配置。此时,BootROM只读取BootROM Header中的偶数位,因为它只访问第一个设备,而Header信息跨两个设备分布。BootROM将形成一个32位字,该字包括宽度检测(位于0x20)和映像标识(位于0x24)参数值的偶数位。当BootROM检测到这种情况时,它会假定系统使用8位并行配置,并将控制器编程为x8操作模式。该模式用于启动过程的其余部分。
2.3 BootROM Header搜索
如果BootROM未检测到有效的Header信息,那么它将继续搜索,直到找到有效的Header信息或达到32MB的搜索限制。在4位堆叠I/O的情况下,仅搜索第一个Quad-SPI设备,并且搜索仅限于内存的前16MB。
BootROM具有强大的I/O配置检测能力,能够根据不同的配置模式(如4位I/O、8位并行I/O等)智能地配置Quad-SPI接口。当检测到有效的Header信息时,BootROM会相应地设置控制器的工作模式,以确保与存储设备的正确通信。此外,BootROM还具有Header搜索功能,能够在一定范围内搜索有效的Header信息,从而提高了系统的可靠性和容错能力。
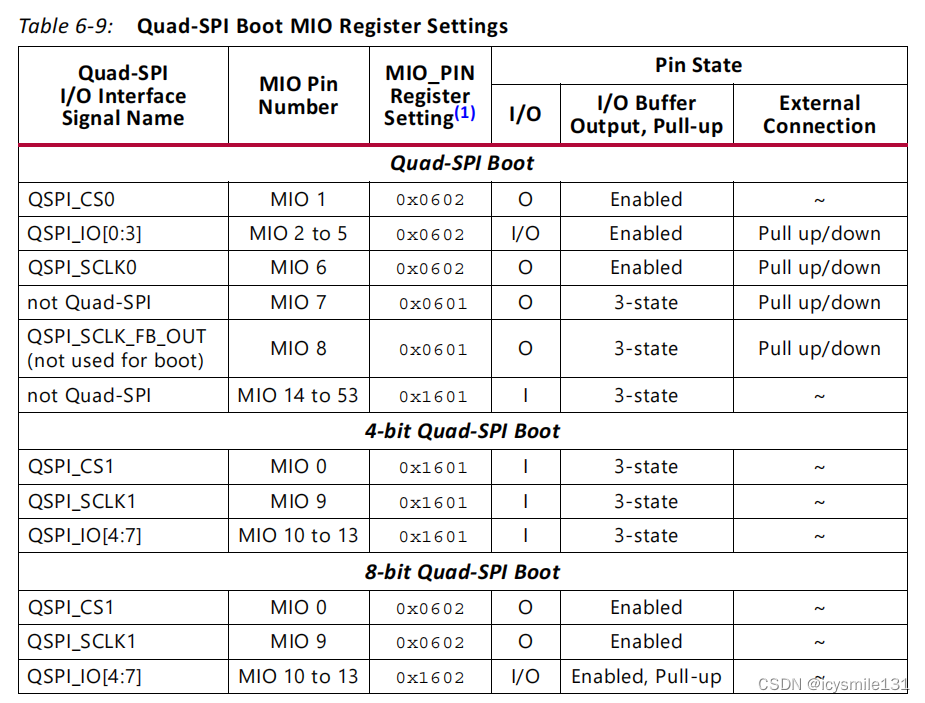
2.4 MIO编程
在Quad-SPI启动模式过程中,加载到MIO_PIN寄存器的值如表6-9所示。最初,BootROM启用4位模式。如果宽度检测机制确定数据宽度为8位,则会启用表中所示的其他MIO引脚。
3 就地执行选项
对于就地执行选项,BootROM使用Quad-SPI控制器的线性寻址功能进行非安全启动模式。对于单个设备,初始FSBL/用户代码必须适合在内存的前16MB内;对于x8双Quad-SPI设备系统,则必须在内存的前32MB内。
4 配置寄存器设置
BootROM通过以下配置来设置qspi.LQSPI_CFG:
• CLK_POL:0,CLK_PH:0
• BAUD_RATE_DIV:1(除以4)
• INST_CODE设置为: x1模式 = 0x03,x2模式 = 0x3B,x4模式 = 0x6B
• DUMMY_BYTE设置为: x1模式 = 0,x2和x4模式 = 1
• 如果使用双x4配置,则设置SEP_BUS和TWO_MEM
通过这些设置,BootROM确保了Quad-SPI接口的正确配置,以便与连接的设备进行通信。根据检测到的I/O宽度,BootROM会相应地调整配置寄存器的值,以优化数据传输效率。此外,就地执行选项允许BootROM直接从Quad-SPI闪存中执行代码,而无需将其加载到RAM中,这有助于减少启动时间和内存占用。
5 启动时间优化
在Quad-SPI启动过程中,可以通过在读取闪存内容到OCM(片上存储器)之前修改操作模式来加速启动过程。通过编程BootROM Header寄存器初始化参数来改进启动时间或选择模式。
以下示例中的寄存器优化值来源于供应商的数据手册。这些都是示例,可能并未针对特定的闪存设备或板卡设计进行优化。这些设置假定PS_CLK为33 MHz。如果使用了更快的时钟,则需要考虑使用更大的分频器。
MIO多路复用器、时钟控制和其他配置的优化设置如表6-10所示。如果某个寄存器的宽度或安全组合未列出,则使用BootROM后的值。

通过优化这些配置,可以确保Quad-SPI接口以最高效率工作,从而加快从闪存中读取数据的速度,减少启动时间。























![Ubuntu20.04 [Ros Noetic]版本——在catkin_make编译时出现报错的解决方案](https://img-blog.csdnimg.cn/direct/7ba550cede664da490095aea4003b022.png)