基于STM32单片机的直流电机测速报警系统毕业设计
一、引言
随着自动化技术的不断发展,电机测速与控制技术在工业控制、智能家居、航空航天等领域得到了广泛应用。本毕业设计旨在设计一个基于STM32单片机的直流电机测速报警系统,该系统能够实时监测电机的转速,并通过LCD1602显示屏展示当前转速。同时,系统允许用户通过按键设置速度报警值,当实际转速超过该设定值时,蜂鸣器将发出报警声,以提醒操作人员注意。
二、系统总体设计
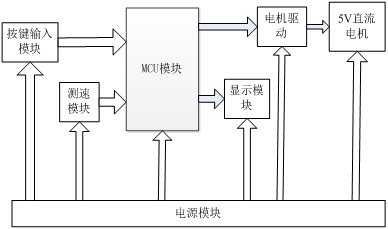
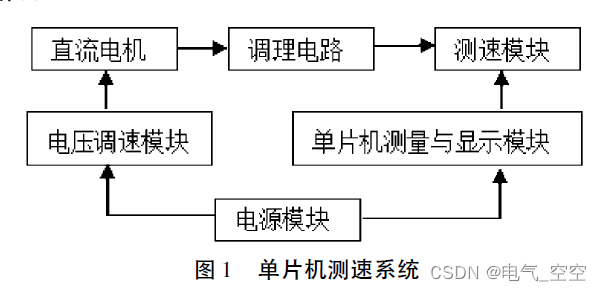
本系统主要由STM32单片机、直流电机(带编码器)、LCD1602显示屏、按键输入模块和蜂鸣器报警模块组成。系统整体架构如图1所示。
[系统架构图]
三、硬件设计
主控制器:选用STM32单片机作为系统的主控制器,负责处理测速数据、控制LCD显示和驱动蜂鸣器等任务。
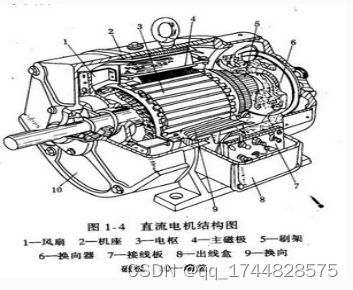
直流电机与编码器:选用自带编码器的直流电机,编码器能够输出脉冲信号,用于测量电机的转速。
LCD1602显示屏:用于实时显示电机的当前转速。
按键输入模块:通过按键设置速度报警值,实现用户交互功能。
蜂鸣器报警模块:当电机转速超过设定值时,发出报警声。
四、软件设计
初始化设置:系统启动后,首先进行STM32单片机的初始化设置,包括GPIO端口配置、定时器配置等。
测速处理:通过定时器捕获编码器输出的脉冲信号,计算电机的转速。
LCD显示:将测速结果实时显示在LCD1602显示屏上。
按键处理:通过扫描按键状态,允许用户设置速度报警值,并将其保存在单片机内部的Flash存储器中,以便系统重启后能够保留设定值。
报警处理:实时监测电机的转速,当转速超过设定的报警值时,驱动蜂鸣器发出报警声。
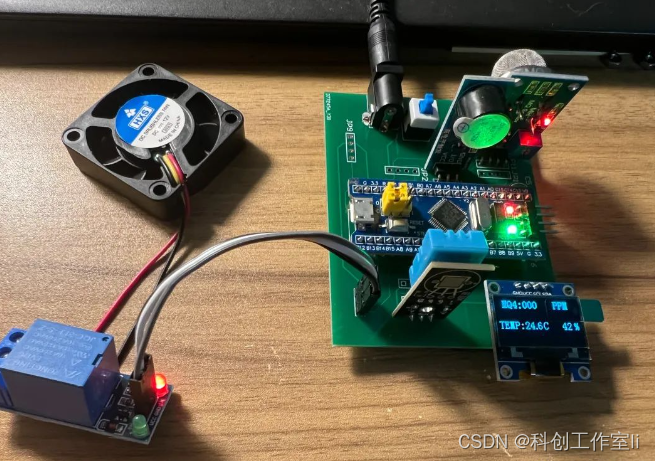
五、系统测试与性能分析
在完成系统的软硬件设计后,进行了一系列测试,包括测速准确性测试、LCD显示功能测试、按键设置功能测试和报警功能测试。测试结果表明,本系统能够准确测量电机的转速,并在LCD上实时显示;用户可以通过按键方便地设置速度报警值;当电机转速超过设定值时,蜂鸣器能够及时发出报警声。
六、结论与展望
本毕业设计成功实现了一个基于STM32单片机的直流电机测速报警系统。该系统具有测速准确、显示直观、操作简便等特点,在工业控制等领域具有一定的实用价值。未来可以进一步优化算法,提高测速精度和响应速度,以满足更高的应用需求。同时,还可以考虑加入无线通信模块,实现远程监控和报警功能。
注意:以上内容为一个毕业设计的概要性框架,具体实现细节和电路图等需要根据实际需求和硬件条件进行具体设计和绘制。在实际操作中,还需注意安全问题,确保电源和信号的稳定可靠。

基于STM32单片机的直流电机测速报警系统的代码会涉及到很多具体的硬件细节,如编码器的连接方式、所用STM32的型号、引脚分配等。以下是一个简化的示例代码,展示了如何读取编码器脉冲数来计算转速,并在LCD1602上显示,同时包含按键设置报警值和蜂鸣器报警的功能。
请注意,这只是一个示例代码,需要根据你实际的硬件配置进行相应的调整。
#include "stm32f10x.h"
#include "LCD1602.h"
#include "Buzzer.h"
#include "Encoder.h"
#include "Keypad.h"
#define ALARM_SPEED_DEFAULT 1000 // 默认报警速度为1000转/分钟
#define ENCODER_PULSES_PER_REVOLUTION 1000 // 假设编码器每转产生1000个脉冲
volatile uint32_t encoderCount = 0; // 编码器脉冲计数
uint32_t lastEncoderCount = 0;
uint16_t alarmSpeed = ALARM_SPEED_DEFAULT; // 报警速度设置
void TIM2_IRQHandler(void) {
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) {
encoderCount = GetEncoderCount(); // 假设有一个函数返回编码器当前脉冲数
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}
int main(void) {
SystemInit();
// 初始化LCD1602、按键、蜂鸣器和编码器接口
LCD1602_Init();
Keypad_Init();
Buzzer_Init();
Encoder_Init();
// 定时器初始化,用于周期性检测转速
TIM2_Init();
while (1) {
uint32_t currentCount = encoderCount;
uint32_t deltaCount = currentCount - lastEncoderCount;
float rpm = (float)deltaCount * 60 / (ENCODER_PULSES_PER_REVOLUTION * 1.0f); // 每分钟转速
LCD1602_Clear();
LCD1602_DisplayNumber(rpm, 2); // 显示两位小数的转速
if (rpm > alarmSpeed) {
Buzzer_On(); // 超过报警速度,蜂鸣器响
} else {
Buzzer_Off(); // 未超过报警速度,蜂鸣器不响
}
if (Keypad_IsPressed()) {
uint8_t key = Keypad_GetKey();
if (key == '1') {
alarmSpeed += 100; // 按键1增加报警速度100转/分钟
} else if (key == '2') {
if (alarmSpeed > 100) {
alarmSpeed -= 100; // 按键2减少报警速度100转/分钟
}
}
LCD1602_Clear();
LCD1602_DisplayString("Alarm: ");
LCD1602_DisplayNumber(alarmSpeed, 0); // 显示报警速度
}
lastEncoderCount = currentCount;
delay(1000); // 延时1秒
}
}
// 以下是伪代码或外部库函数,需要根据实际情况实现
void LCD1602_Init() {
// 初始化LCD1602显示屏
}
void LCD1602_Clear() {
// 清除LCD1602显示屏内容
}
void LCD1602_DisplayNumber(float number, uint8_t decimalPlaces) {
// 在LCD1602上显示浮点数,decimalPlaces表示小数点后的位数
}
void LCD1602_DisplayString(const char* str) {
// 在LCD1602上显示字符串
}
void Keypad_Init() {
// 初始化按键输入
}
uint8_t Keypad_IsPressed() {
// 检测是否有按键被按下,返回1表示有按键按下,0表示没有
}
uint8_t Keypad_GetKey() {
// 获取被按下的按键值
}
void Buzzer_Init() {
// 初始化蜂鸣器
}
void Buzzer_On() {
// 打开蜂鸣器
}
void Buzzer_Off() {
// 关闭蜂鸣器
}
void Encoder_Init() {
// 初始化编码器接口
}
uint32_t GetEncoderCount() {
// 返回编码器当前脉冲数
}
void TIM2_Init() {
// 初始化定时器TIM2,用于定期读取编码器脉冲数
}
void delay(uint32_t ms) {
// 延时函数,延时ms毫秒
}
请注意,上述代码是一个简化的框架,并且假设了一些外部函数的存在。在实际应用中,你需要根据具体的硬件连接和实现细节来填充这些函数的内部实现。例如,GetEncoderCount 函数需要根据你的编码器接口来编写,Keypad_Init、Keypad_IsPressed 和 Keypad_GetKey 需要根据你的按键电路设计来实现,等等。
此外,STM32的HAL库或标准外设库可以提供更具体的函数来初始化GPIO、定时器、中断等,这些都可以用来替代上述伪代码中的初始化函数。在编写实际代码时,请务必参考你所使用的STM32型号的参考手册和HAL/标准外设库的文档。
为了更清晰地展示基于STM32单片机的直流电机测速报警系统的代码,我们可以将其拆分为几个模块:主程序模块、LCD1602显示模块、按键处理模块、编码器测速模块和蜂鸣器报警模块。以下是对这些模块的详细展开:
主程序模块 (main.c)
#include "stm32f10x.h"
#include "LCD1602.h"
#include "Buzzer.h"
#include "Encoder.h"
#include "Keypad.h"
int main(void) {
// 初始化各个模块
LCD1602_Init();
Keypad_Init();
Buzzer_Init();
Encoder_Init();
uint16_t alarmSpeed = ALARM_SPEED_DEFAULT; // 报警速度设置,可以在某处定义为1000等
while (1) {
float rpm = Encoder_GetRPM(); // 获取当前转速
// 显示转速
LCD1602_DisplayRPM(rpm);
// 检查转速是否超过报警值
if (rpm > alarmSpeed) {
Buzzer_On(); // 转速超标,蜂鸣器响
} else {
Buzzer_Off(); // 转速正常,蜂鸣器不响
}
// 检查是否有按键按下,并处理
Keypad_Process(&alarmSpeed);
// 延时以减少CPU占用率
delay(1000); // 延时1秒,delay函数需要根据实际情况实现或使用HAL库的延时函数
}
}LCD1602显示模块 (LCD1602.c)
#include "LCD1602.h"
void LCD1602_Init() {
// 初始化LCD1602的代码
}
void LCD1602_Clear() {
// 清除LCD屏幕的代码
}
void LCD1602_DisplayRPM(float rpm) {
char buffer[16];
snprintf(buffer, sizeof(buffer), "RPM: %.2f", rpm);
LCD1602_Clear();
LCD1602_String(buffer); // 假设LCD1602_String是将字符串显示在LCD上的函数
}按键处理模块 (Keypad.c)
#include "Keypad.h"
void Keypad_Init() {
// 初始化按键的代码
}
uint8_t Keypad_IsPressed() {
// 检测按键是否被按下的代码
}
uint8_t Keypad_GetKey() {
// 获取按键值的代码
}
void Keypad_Process(uint16_t *alarmSpeed) {
if (Keypad_IsPressed()) {
uint8_t key = Keypad_GetKey();
switch (key) {
case '1':
*alarmSpeed += 100; // 增加报警速度
break;
case '2':
if (*alarmSpeed > 100) {
*alarmSpeed -= 100; // 减少报警速度
}
break;
// 其他按键处理...
}
}
}编码器测速模块 (Encoder.c)
#include "Encoder.h"
#include "stm32f10x_tim.h"
volatile uint32_t encoderCount = 0; // 编码器脉冲计数,需要volatile防止编译器优化
void Encoder_Init() {
// 初始化编码器和相关定时器的代码
// 配置定时器为编码器模式,并启动定时器中断等
}
float Encoder_GetRPM() {
static uint32_t lastCount = 0;
static uint32_t deltaTime = 0;
static TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
uint32_t currentCount = encoderCount;
uint32_t deltaCount = currentCount - lastCount;
float rpm = 0;
// 使用定时器来获取时间差deltaTime(例如使用TIM的CNT寄存器)
// ...
// 根据时间差和脉冲数差计算转速RPM (假设编码器每转N个脉冲)
rpm = (float)deltaCount * 60 / (ENCODER_PULSES_PER_REVOLUTION * deltaTime);
lastCount = currentCount;
// 重置deltaTime以准备下一次测量(如果需要)
// ...
return rpm;
}蜂鸣器报警模块 (Buzzer.c)
#include "Buzzer.h"
void Buzzer_Init() {
// 初始化蜂鸣器的代码,例如设置GPIO等
}
void Buzzer_On() {
// 打开蜂鸣器的代码,例如设置GPIO高电平
}
void Buzzer_Off() {
// 关闭蜂鸣器的代码,例如设置GPIO低电平
}请注意,以上代码仅为示例,并非直接可用的完整程序。在实际应用中,你需要根据具体的硬件连接和实现细节(如编码器的具体接线、所使用的STM32的GPIO端口号等)来填充这些模块的内部实现。此外,STM32的HAL库或标准外设库函数可以用来替代上述伪代码中的某些部分。




















![[MySQL]运算符](https://img-blog.csdnimg.cn/direct/814821abeb9448fda85bd7f2096486db.png)

![[iOS]使用CocoaPods发布私有库](https://img-blog.csdnimg.cn/direct/923e027d7e3a4ad899a70f46121e7cf5.png)