摘要:基于PLC的机械臂运行轨迹控制系统通过PLC采集现场信号及输出信号的状态变化实现机械臂运行轨迹的控制,不能实现多自由度机械臂控制。设计基于单片机的机械臂运行轨迹在线控制系统,系统硬件由上位机PC在线控制、主控制板和机械臂舵机控制板构成,通过光电编码器位移传感器实现机械臂位置、位移感觉,利用舵机控制板采用Arduino舵机扩展板和D⁃H理论,构建机械臂结构模型,实现多自由度机械臂的控制。系统软件主要由上位机在线控制部分、主控制板控制程序和舵机控制板程序组成,由主控板控制程序和上位机在线控制程序两部分实现机械臂控制,通过单片机系统时钟初始化提高系统的运行速度。实验结果表明,所设计的系统能够稳定、快速地实现机械臂轨迹控制,并且准确度高。
关键词:单片机;机械臂;运行轨迹;舵机控制;光电编码器;位移传感器
随着当代社会信息技术和生产自动化程度的突飞猛进,机械人也随之步入高度自动化、智能化的阶段,它替代传统的人工作业方式,减轻劳动量的同时,还可以提高生产效率、降低生产成本,并且使因人工疏忽导致的安全事故得到极大的减少[1],在生产、生活中扮演着越来越重要的角色,已成为现代化生产中至关重要的环节。在机械人技术领域中,机械臂通过自动控制具有操作功能和移动功能[2],可以通过编程来完成各种作业,广泛的应用在设备装配、自动喷漆、自动化生产线、教育研究等领域。传统的基于PLC 的机械臂运行轨迹控制系统不能实现多自由度控制,并且存在稳定性差以及精度低的缺点。针对这种情况,本文设计了基于单片机的机械臂运行轨迹在线控制系统。
1 基于单片机的机械臂运行轨迹在线控制系统
1.1 系统硬件结构设计
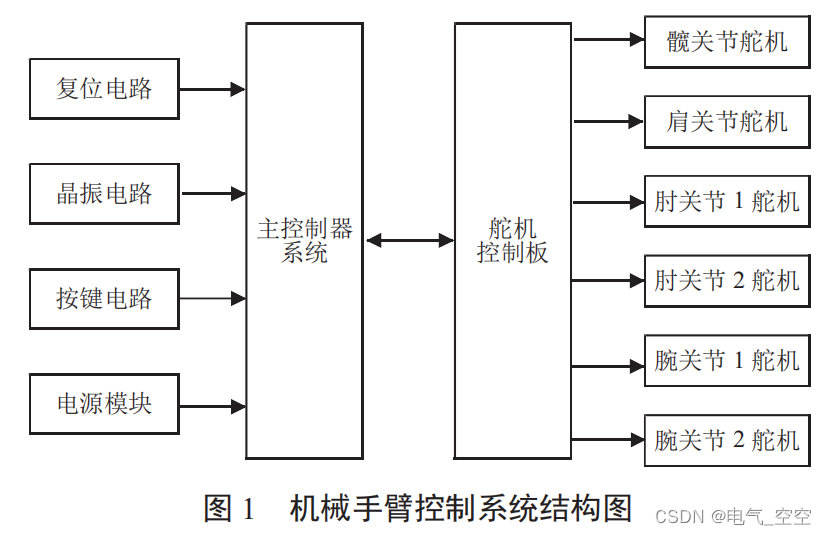
系统的硬件主要包括上位机PC 在线控制、主控制板和机械臂舵机控制板三部分。系统的核心控制器也就是Ardui