1、舵机的简介
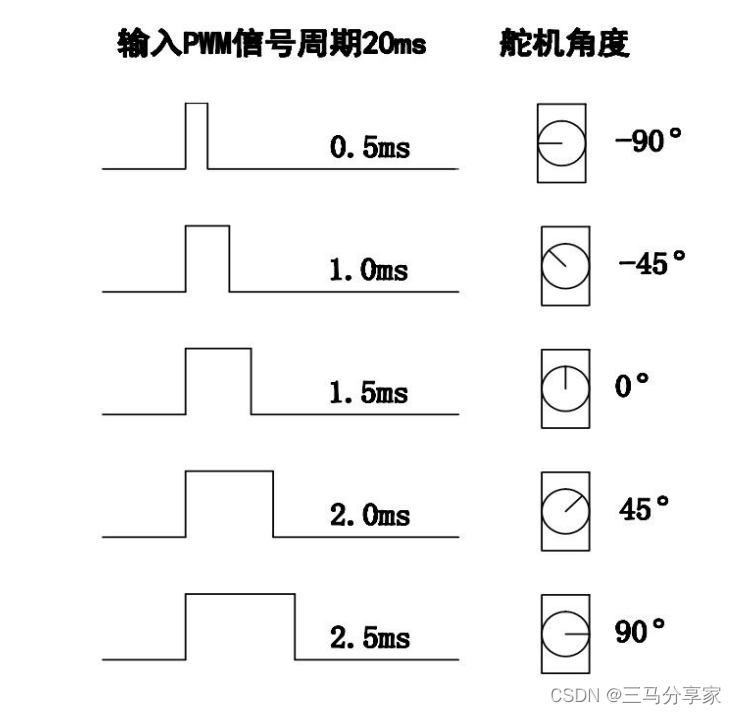
舵机有三个引脚,一个接电源,即3.3V或者5V,一个接地,还有一个是信号引脚,其信号引脚是通过PWM波去控制舵机的转动角度。
市场上的舵机有180°的,也有270°的,其信号引脚是根据不同的pwm波(即高电平的时间)去控制舵机的角度,当通电打相应的pwm波时,舵机就会已最快的速度到达其对应的位置,持续不断地打该pwm波,就会使得舵机保持在该角度,所以舵机是无法控制速度的,只能通过每次给的舵机的角度差距不大控制速度。
2、pwm波
是一种波形,其中有占空比等概念,主要是高低电平多占比例,可以使用逻辑分析仪读出某一电平的pwm波。
3、stm32控制舵机
(1)使用延时控制
可以通过延时来控制某一引脚的pwm波从而控制舵机的运转。
(2)使用定时器控制
定时器中有pwm波输出,可以使用stm32cubemx设置定时器的为pwm波输出模式,并写入比较值并控制引脚的pwm波。
4、例程
#include "stm32f4xx.h"
#define PWM_PERIOD 20000 // PWM周期,单位为微秒
#define PWM_MIN_PULSE 1000 // PWM最小脉宽,单位为微秒
#define PWM_MAX_PULSE 2000 // PWM最大脉宽,单位为微秒
void delay_us(uint32_t us) {
us *= (SystemCoreClock / 1000000) / 9;
while (us--) {
__NOP();
}
}
void servo_set_angle(uint8_t angle) {
uint32_t pulse_width = PWM_MIN_PULSE + (PWM_MAX_PULSE - PWM_MIN_PULSE) * angle / 180;
TIM2->CCR1 = pulse_width;
delay_us(1000); // 延时1ms,等待舵机转动到指定角度
}
int main(void) {
// 初始化GPIO和TIM2
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource0, GPIO_AF_TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = PWM_PERIOD - 1;
TIM_TimeBaseStructure.TIM_Prescaler = (SystemCoreClock / 1000000) - 1;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = PWM_MIN_PULSE;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM2, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_Cmd(TIM2, ENABLE);
while (1) {
// 控制舵机转动到0度
servo_set_angle(0);
delay_us(1000000); // 延时1秒
// 控制舵机转动到90度
servo_set_angle(90);
delay_us(1000000); // 延时1秒
// 控制舵机转动到180度
servo_set_angle(180);
delay_us(1000000); // 延时1秒
}
}