DL00295-基于AirSim仿真环境的无人机深度强化学习算法路径规划完整实现含详细说明文档
- 开发
- 30
-
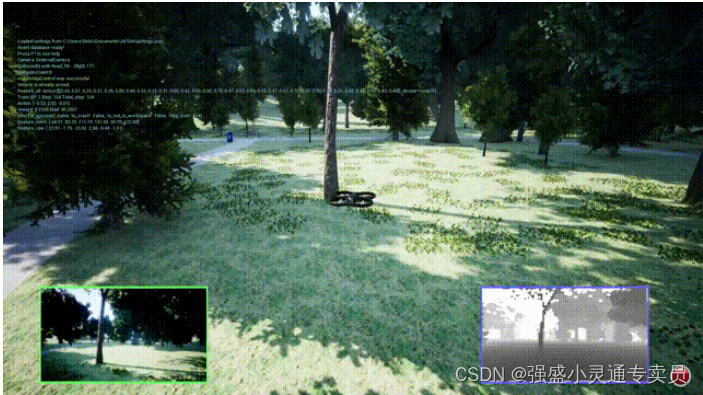
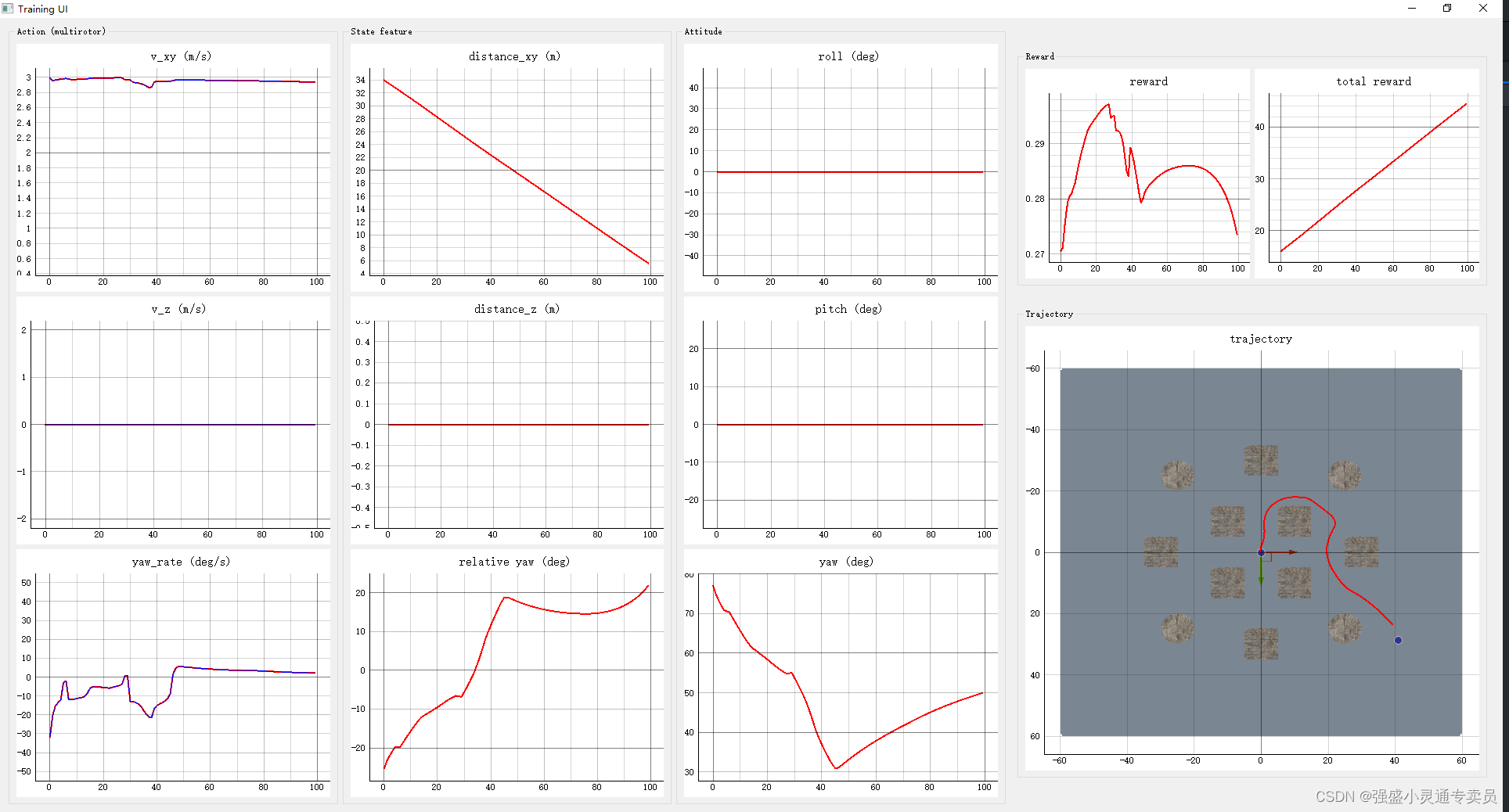
-创建了一个开放的AI Gym环境,包括多旋翼和固定翼无人机的运动学模型。
-提供了一些UE4环境来训练和测试深度强化学习DRL导航策略。
-基于AirSim和SB3。
完整代码链接见文末。


DL00295-基于AirSim仿真环境的无人机深度强化学习算法路径规划完整实现含详细说明文档
原文地址:https://blog.csdn.net/crasher123/article/details/137631584
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。
本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:https://www.suanlizi.com/kf/1779675028854542336.html
如若内容造成侵权/违法违规/事实不符,请联系《酸梨子》网邮箱:1419361763@qq.com进行投诉反馈,一经查实,立即删除!