Robotstudio2024中从备份文件恢复和创建工作站的具体方法演示

如下图所示,打开Robotstudio2024软件,有需要的可以从以下链接获取:
ABB机器人编程仿真软件RobotStudio 2024.1-链接baiduyun
点击“新建”—工作站—创建,

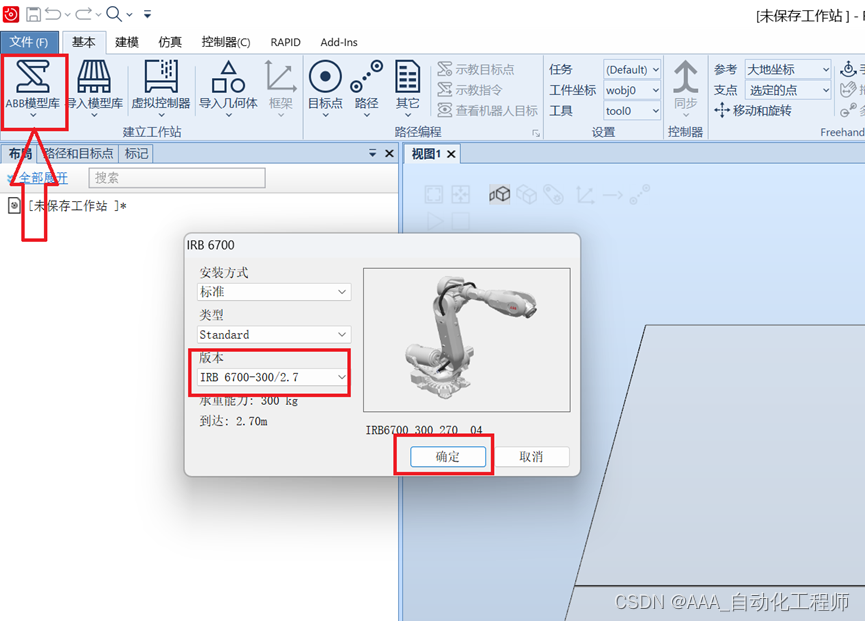
如下图所示,点击“ABB模型库”,选择自己使用的机器人型号,我这里以IRB6700-300/2.7为例进行说明,
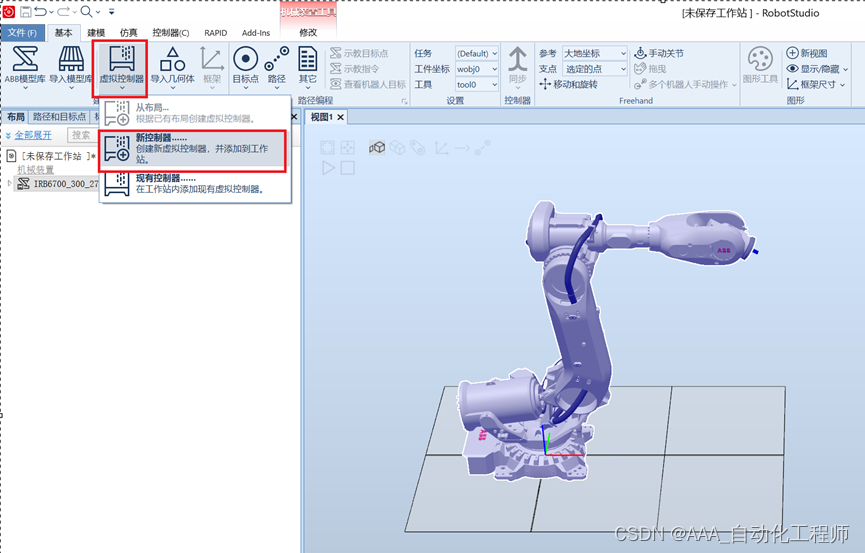
如下图所示,点击虚拟控制器—新控制器,
如下图所示,这里勾选“从备份创建”—选择备份文件夹(前提是你已经成功从实际的机器人上成功备份了,具体备份的方法可参考以下链接中的内容: