模拟量传感器
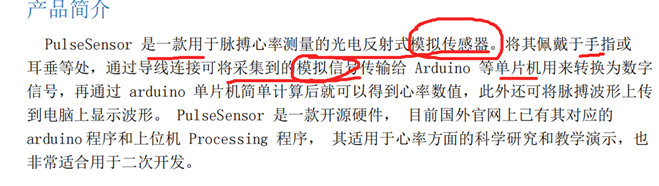
模拟量传感器可以提供连续的输出信号,通过测量和转换物理量的变化来获取相关信息。其中包括:
光照传感器
光照传感器常用于测量周围环境的光照强度。其特点包括:
- 使用光敏电阻作为传感器元件。
- 光敏电阻的阻值随着光照强度的增加而减小。
- 通过测量电流或电压的变化来确定光照强度的大小。
空气质量传感器
空气质量传感器用于检测周围空气中的污染物浓度,常见的包括二氧化碳、甲醛、颗粒物等。其特点包括:
- 可以测量多种污染物。
- 测量原理多样,通常基于化学反应或光学原理。

对应IO口 模拟输入
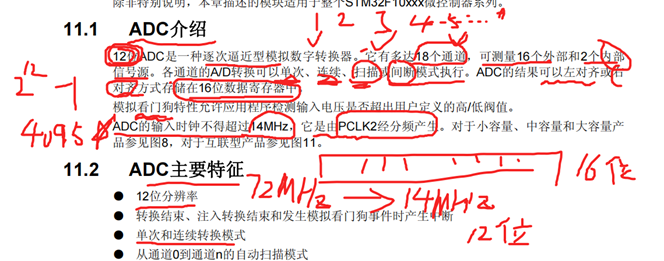
ADC(模数转换器)
ADC是模数转换器的简称,它负责将模拟信号转换为数字信号。常见的ADC转换方法之一是逐次逼近法。
逐次逼近法
逐次逼近法是一种常见的ADC转换方法,其工作原理如下:
- 初始化:首先,ADC将模拟输入信号的范围划分为若干个离散的电平。
- 比较:ADC将一个参考电平与输入信号进行比较。
- 调整:根据比较结果,ADC调整参考电平,使其更接近输入信号的值。
- 重复:反复执行比较和调整步骤,逐渐逼近输入信号的准确值。
- 完成:当参考电平与输入信号的差异足够小,ADC将得到一个近似于输入信号的数字输出值。
特点
- 高精度:逐次逼近法可以提供较高的转换精度。
- 适用性:适用于需要高精度且转换速度较慢的应用场景。
- 复杂度:相对于其他转换方法,逐次逼近法的硬件和软件复杂度通常较高。
逐次逼近法是ADC中常用的一种转换方法,它通过不断调整参考电平来逼近输入信号的准确值,从而实现模拟信号到数字信号的转换。
查看技术参考手册:
ADC特点:
- 数据位数和寄存器对齐:12位ADC的转换结果会被放置在一个16位的寄存器中,右对齐表示高位填充0。
- 单次和连续转换:ADC可以进行单次转换,即只进行一次模拟信号到数字信号的转换。也可以进行连续转换,即连续地进行多次转换。
- 扫描和间断模式:ADC可以工作在扫描模式下,它可以按照事先定义好的顺序依次转换多个通道的模拟信号。间断模式下,ADC只进行单次转换。
- 时钟频率限制:ADC的时钟频率不能超过14MHz,这个限制保证了转换的准确性和稳定性。
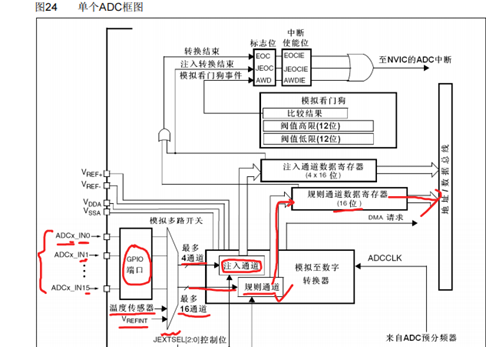
- 通道数量:ADC具有18个通道,其中16个是外部通道,用于连接外部模拟信号源;另外2个是内部通道,用于测量芯片内部的参考电压等。
光照传感器
- 引脚连接:
- 光照传感器的输出引脚(ILLU)连接到PA5引脚。
- ADC通道:
- 光照传感器的模拟输出信号通过ADC进行转换。
- 连接到了ADC1或ADC2的IN5通道。
光照传感器和ADC配置步骤
配置PA5引脚为模拟输入模式:
Copy CodeExplain// 设置PA5引脚为模拟输入模式 GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.Pin = GPIO_PIN_5; GPIO_InitStruct.Mode = GPIO_MODE_ANALOG; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);配置ADC模式:
Copy CodeExplainADC_HandleTypeDef hadc; // 配置ADC参数 hadc.Instance = ADC1; // 或者ADC2,根据实际情况选择 hadc.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV2; hadc.Init.Resolution = ADC_RESOLUTION_12B; hadc.Init.DataAlign = ADC_DATAALIGN_RIGHT; hadc.Init.ScanConvMode = ADC_SCAN_DISABLE; // 禁用扫描模式 hadc.Init.ContinuousConvMode = DISABLE; // 选择单次转换模式 hadc.Init.DiscontinuousConvMode = DISABLE; // 禁用间断模式 hadc.Init.NbrOfConversion = 1; // 转换通道数量,此处为1 hadc.Init.ExternalTrigConv = ADC_SOFTWARE_START; // 软件触发转换 HAL_ADC_Init(&hadc);执行ADC自校准:
Copy Code// 执行ADC自校准 HAL_ADCEx_Calibration_Start(&hadc);
完整代码:
adc2.c
#include "ADC2.h"
void ADC2_Config()
{
//PA5 ADC2 IN5
//配置IO口 模拟输入
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//配置ADC2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC2,ENABLE);
//时钟最大不超过14MHZ
RCC_ADCCLKConfig(RCC_PCLK2_Div6);//72/6 12MHZ
//配置模式
ADC_InitTypeDef ADC_InitStruct;
ADC_InitStruct.ADC_ContinuousConvMode = DISABLE;//单次转换
ADC_InitStruct.ADC_DataAlign = ADC_DataAlign_Right;//右对齐
ADC_InitStruct.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;//软件启动
ADC_InitStruct.ADC_Mode = ADC_Mode_Independent;//独立模式
ADC_InitStruct.ADC_NbrOfChannel = 1;//转换通道数目
ADC_InitStruct.ADC_ScanConvMode = DISABLE;//单通道
//初始化
ADC_Init(ADC2,&ADC_InitStruct);
//使能
ADC_Cmd(ADC2,ENABLE);
//校准
//充值校准器
ADC_ResetCalibration(ADC2);
while(ADC_GetResetCalibrationStatus(ADC2) == 1)//等待重置成功
{}
//开始校准
ADC_StartCalibration(ADC2);
while(ADC_GetCalibrationStatus(ADC2) == 1)//等待校准成功
{}
}
u16 illu;
u16 mq;
void ADC2_GetValue(void)
{
//配置ADC通道
ADC_RegularChannelConfig(ADC2,ADC_Channel_5,1,ADC_SampleTime_55Cycles5);
//开始转换
ADC_SoftwareStartConvCmd(ADC2,ENABLE);
while(ADC_GetFlagStatus(ADC2,ADC_FLAG_EOC) == 0)
{}
illu = ADC_GetConversionValue(ADC2);
printf("illu=%d\r\n",illu);
//配置ADC通道
ADC_RegularChannelConfig(ADC2,ADC_Channel_11,1,ADC_SampleTime_55Cycles5);
//开始转换
ADC_SoftwareStartConvCmd(ADC2,ENABLE);
while(ADC_GetFlagStatus(ADC2,ADC_FLAG_EOC) == 0)
{}
mq = ADC_GetConversionValue(ADC2);
printf("mq=%d\r\n",mq);
}
adc2.h
#ifndef __ADC2_H
#define __ADC2_H
#include "main.h"
void ADC2_Config();
void ADC2_GetValue();
extern u16 mq;
extern u16 illu;
#endif