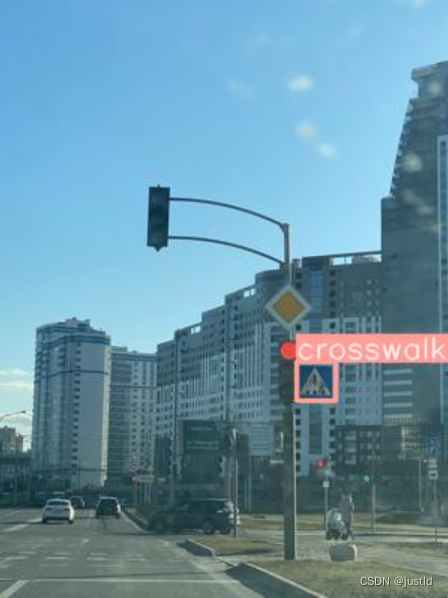
识别目标后,截取目标框大小的图片,压缩传输。
1、test_client.py
python3 test_client.py 7 1
elif cmd == str(7):
print("sent capture object img cmd...")
arrBuff = bytearray(b'\xff\xbb\xff\xbb\xee\xff\xee\xff')在协议文件中,启动识别并截图的协议为:
![]()
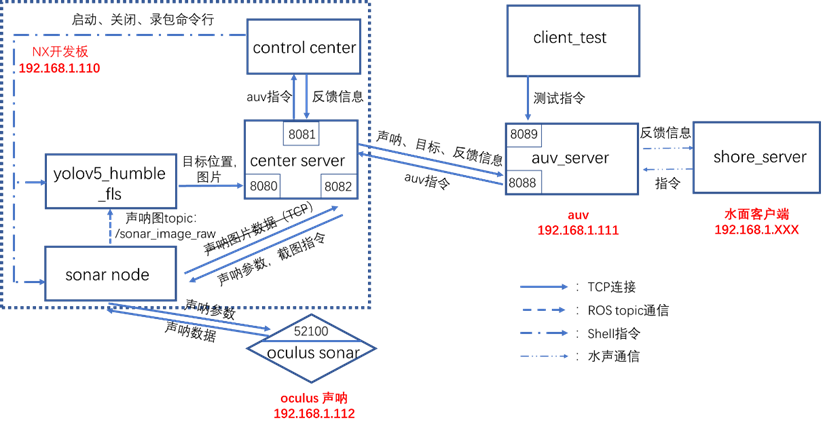
故模块将该数据包发送至auv_server。
2、auv_server.py
def test_cmd(self):
while True:
self.test_conn, self.test_addr = self.test_server.accept()
test_cmd_msg = self.test_conn.recv(1024)
if len(test_cmd_msg)>0:
self.conn.send(test_cmd_msg)
直接将指令转发至center_server
3、center_server.py
# send the control_center cmd from auv to the control_center module on nx
def recv_control_center_msg(self):
while True:
cmd_msg = self.nx_client.recv(1024)
if len(cmd_msg) > 3:
# send the control_center cmd to the control_center module
if cmd_msg[-4:] == b'\xee\xff\xee\xff':
self.control_center_socket.send(cmd_msg)
# send the sonar parameters cmd to the sonar module
elif cmd_msg[-4:] == b'\xee\xaa\xee\xff':
self.sonar_param_socket.send(cmd_msg)
else:
print("cmd from auv error, no such cmd...")根据'\ee\ff\ee\ff'判断为不带参数的指令,转control_center.py
4、control_center.py
def rcev_cmd(self):
...
# capture the object image and sent back to auv
elif recvmsg[0:4] == self.capture_object_img_msg[0:4]:
if self.capture_img_subprocess:
self.capture_img_subprocess.kill()
self.capture_img_subprocess = subprocess.Popen(self.capture_object_img_cmd, shell=True, executable="/bin/bash")
....根据'\ff\bb\ff\bb'判断为启动识别程序。
self.capture_object_img_cmd = 'ros2 topic pub --once /yolov5/capture_object_image std_msgs/msg/Bool data:\ true'发布/yolov5/capture_object_image。
5、yolov5_sonar.py
监听到topic: /yolov5/capture_object_image
class Yolo_Dect(Node):
def __init__(self):
...
self.object_image_capture_sub = self.create_subscription(Bool, "/yolov5/capture_object_image", self.object_image_capture_callback, 1)
...
def object_image_capture_callback(self, msg):
if msg.data:
self.object_image_capture_flag = True获取截图数据:
def image_callback(self, image):
...
# capture the image to transport
if self.object_image_capture_flag:
self.image_capture = np.frombuffer(image.data, dtype=np.uint8).reshape(
image.height, image.width, -1)
self.capture_image_h = image.height
self.capture_image_w = image.width
self.capture_image_channel = len(image.data) / (image.height * image.width)逐个将目标截图并压缩编码,每个目标截图长度和宽度均不小于300像素,通过image_min_length设置,通过image_quality(0-100)可以设置压缩图像的质量,质量越小,压缩后的图片大小越小,然后传输。
协议文件中,目标图片的协议为:

def dectshow(self, org_img, boxs, sonar_azimuth, sonar_range):
...
# tcp transport the cut and compressed object images data
# ensure get the image
if self.capture_image_h * self.capture_image_w > 0:
object_image_num = len(self.objects_azimuth_range.object_azimuth_range)
# ensure object in the image
if object_image_num > 0:
#if object_image_num > 1: #ensure several object for test
try:
object_image_count = 0
for object_a_r in self.objects_azimuth_range.object_azimuth_range:
# cut the object in the image
if object_a_r.xmax - object_a_r.xmin < (self.image_min_length / 2):
cut_xmin = int((object_a_r.xmin + object_a_r.xmax) / 2.0 - self.image_min_length / 2)
cut_xmax = int((object_a_r.xmin + object_a_r.xmax) / 2.0 + self.image_min_length / 2)
else:
cut_xmin = int(object_a_r.xmin - 50)
cut_xmax = int(object_a_r.xmax + 50)
if object_a_r.ymax - object_a_r.ymin < (self.image_min_length / 2):
cut_ymin = int((object_a_r.ymin + object_a_r.ymax) / 2.0 - self.image_min_length / 2)
cut_ymax = int((object_a_r.ymin + object_a_r.ymax) / 2.0 + self.image_min_length / 2)
else:
cut_ymin = int(object_a_r.ymin - 50)
cut_ymax = int(object_a_r.ymax + 50)
cut_image = self.image_capture[max(0, cut_ymin) : min(self.image_capture.shape[0], cut_ymax), max(0, cut_xmin) : min(self.image_capture.shape[1], cut_xmax)]
# get the class, probability, azimuth and range of the object
img_buff = bytearray(b'\xff\xbb\xff\xbb')
img_buff += bytearray(object_image_num.to_bytes(4, byteorder='little'))
img_buff += bytearray(object_image_count.to_bytes(4, byteorder='little'))
object_class = self.object_name[object_a_r.class_name]
img_buff += bytearray(object_class.to_bytes(4, byteorder='little'))
img_buff += struct.pack('<f', object_a_r.probability)
img_buff += struct.pack('<f', object_a_r.object_azimuth)
img_buff += struct.pack('<f', object_a_r.object_range)
# get the height, width and channel of the object image
cut_img_height = cut_image.shape[0]
cut_img_width = cut_image.shape[1]
cut_img_channel = cut_image.shape[2]
img_buff += bytearray(cut_img_height.to_bytes(4, byteorder='little'))
img_buff += bytearray(cut_img_width.to_bytes(4, byteorder='little'))
img_buff += bytearray(cut_img_channel.to_bytes(4, byteorder='little'))
# encode the object image
encode_param = [int(cv2.IMWRITE_JPEG_QUALITY), self.image_quality]
result, encode_image = cv2.imencode('.jpg', cut_image, encode_param)
# get object image data length
cut_image_data_len = len(encode_image)
img_buff += bytearray(cut_image_data_len.to_bytes(4, byteorder='little'))
# objcet image data
img_buff += bytearray(encode_image)
#print("the trans image length is", len(encode_image))
img_buff += bytearray(b'\xff\xb0\xff\xb0')
self.yolo_client.sendall(img_buff)
#print("sent image " + str(object_image_count))
object_image_count += 1
self.capture_image_h = 0
self.capture_image_w = 0
self.image_capture = None
self.object_image_capture_flag = False
except Exception as e:
self.capture_image_h = 0
self.capture_image_w = 0
self.image_capture = None
print("image transport error... ", e)
目标图片数据传输至server_center.py
6、server_center.py
# recv sonar img and send to auv
def rcv_sonar_img_msg(self):
self.sonar_param_socket, self.sonar_param_addr = self.sonar_param_server.accept()
while True:
img_msg = self.sonar_param_socket.recv(65536)
if img_msg[0:4] == b'\xff\xcc\xff\xcc':
self.nx_client.sendall(img_msg)
if img_msg == b'':
self.sonar_param_socket, self.sonar_param_addr = self.sonar_param_server.accept()
目标图片传输至auv_server.py
7、auv_server.py
# receive the data from auv
def recv_msg(self):
...
# object images
if pkg_head == b'\xff\xbb\xff\xbb':
# object num in one image capture
object_num = struct.unpack('i',recv_msg[4:8])[0]
# current object info in the objects of the captured image
object_info = object()
cur_object_num = struct.unpack('i',recv_msg[8:12])[0]
object_info.object_class = struct.unpack('i', recv_msg[12:16])[0]
object_info.object_probability = struct.unpack('f', recv_msg[16:20])[0]
object_info.object_azimuth = struct.unpack('f', recv_msg[20:24])[0]
object_info.object_range = struct.unpack('f', recv_msg[24:28])[0]
self.recv_images.object_info.append(object_info)
# current object image info
img_height = struct.unpack('i',recv_msg[28:32])[0]
img_width = struct.unpack('i',recv_msg[32:36])[0]
img_channel = struct.unpack('i',recv_msg[36:40])[0]
img_data_len = struct.unpack('i',recv_msg[40:44])[0]
img_data = recv_msg[44:44 + img_data_len]
pkg_end = recv_msg[44 + img_data_len : 48 + img_data_len]
#print(pkg_end)
if pkg_end == b'\xff\xb0\xff\xb0':
self.recv_images.object_image_data.append(img_data)
if self.object_count < object_num:
self.object_count += 1
if self.object_count == object_num:
self.display_image_flag = True
self.object_count = 0
最后通过display_objects_image展示目标图片。
此外关于目标识别模块,还有一个功能是实时将目标的信息传输给auv辅助导航,目标信息的协议参见协议文件。

为了看log调试方便,这个功能我注释掉了,如果不需要图片信息的话,可以将其打开,在yolov5_sonar.py中:
# self.yolo_client.sendall(pkg_buff)