【stm32】I2C通信外设
概念部分
如果简单应用,选择软件I2C。如果对性能指标要求比较高 选择硬件I2C
有硬件电路自动反转引脚电平,软件只需要写入控制寄存器CR和数据寄存器DR 为了实时监控时序的状态,还要读取状态寄存器SR
写入控制寄存器CR,就相当于踩油门、打方向盘 控制汽车的运行
读取状态寄存器SR,就像是观看仪表盘
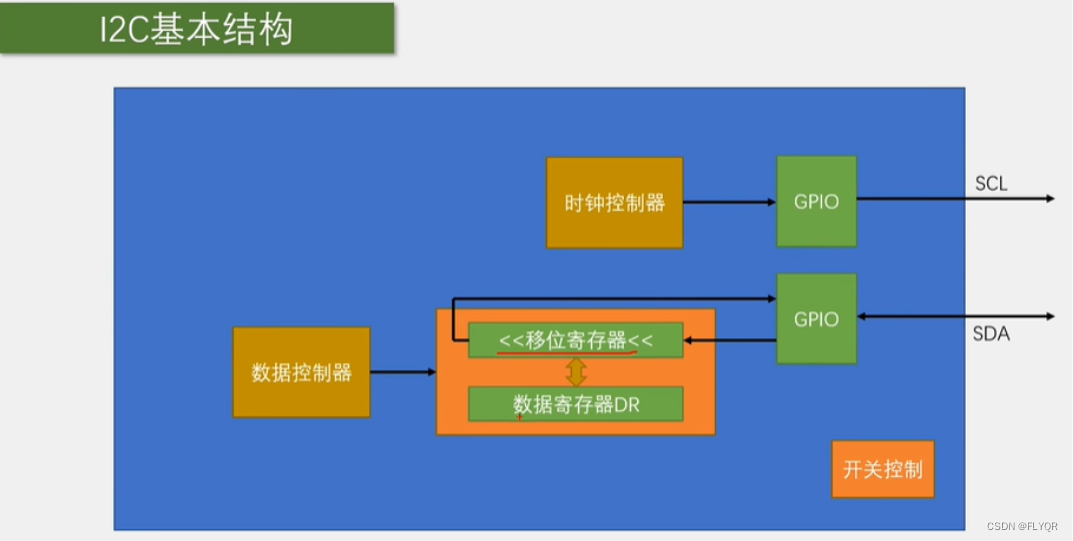
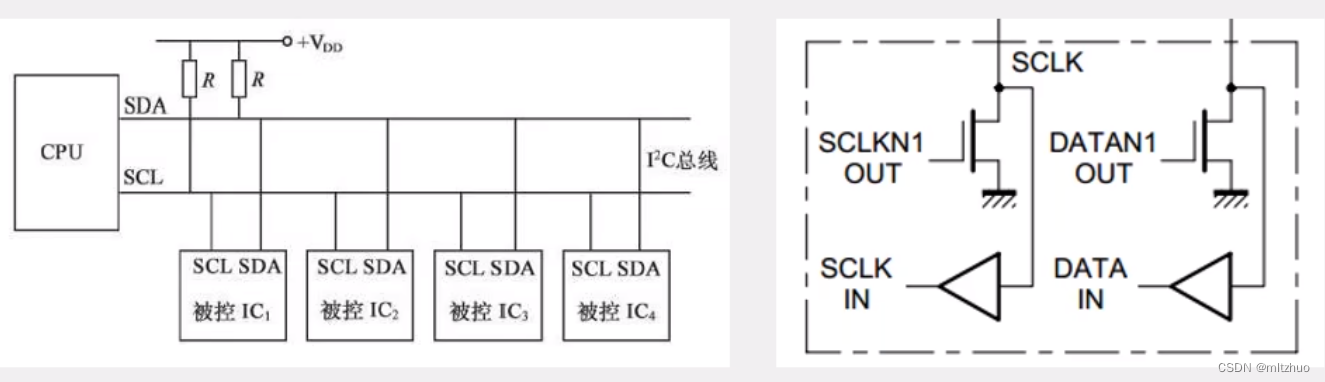
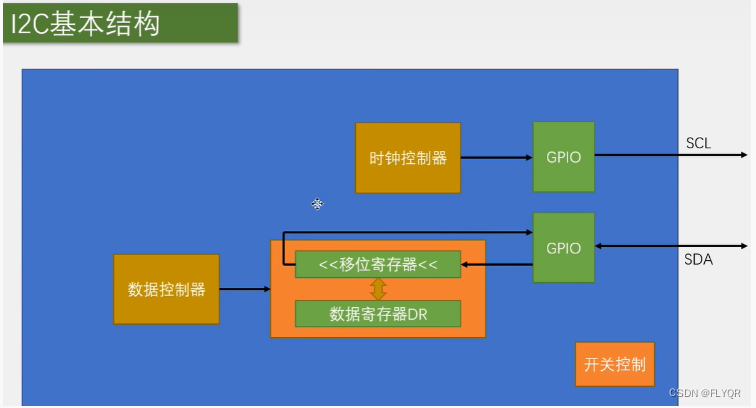
首先移位寄存器和数据寄存器DR的配合是通信的核心部分
因为I2C是高位先行,所以这个移位寄存器是向左移位,在发送的时候最高位先移出去,然后是次高位,移位8次,由高到低位,依次放到SDA线上
在接受的时候,数据通过GPIO口从右边依次移进来
最后GPIO口这里 使用硬件I2C的时候,这两个对应的GPIO口 都要配置成复用开漏输出的模式
复用就是GPIO的状态是交由片上外设来控制的
开漏输出这是I2C协议要求的端口配置
这里即使是开漏输出模式,GPIO口也是可以进行输入的
然后SCL这里,时钟控制器通过GPIO去控制时钟线
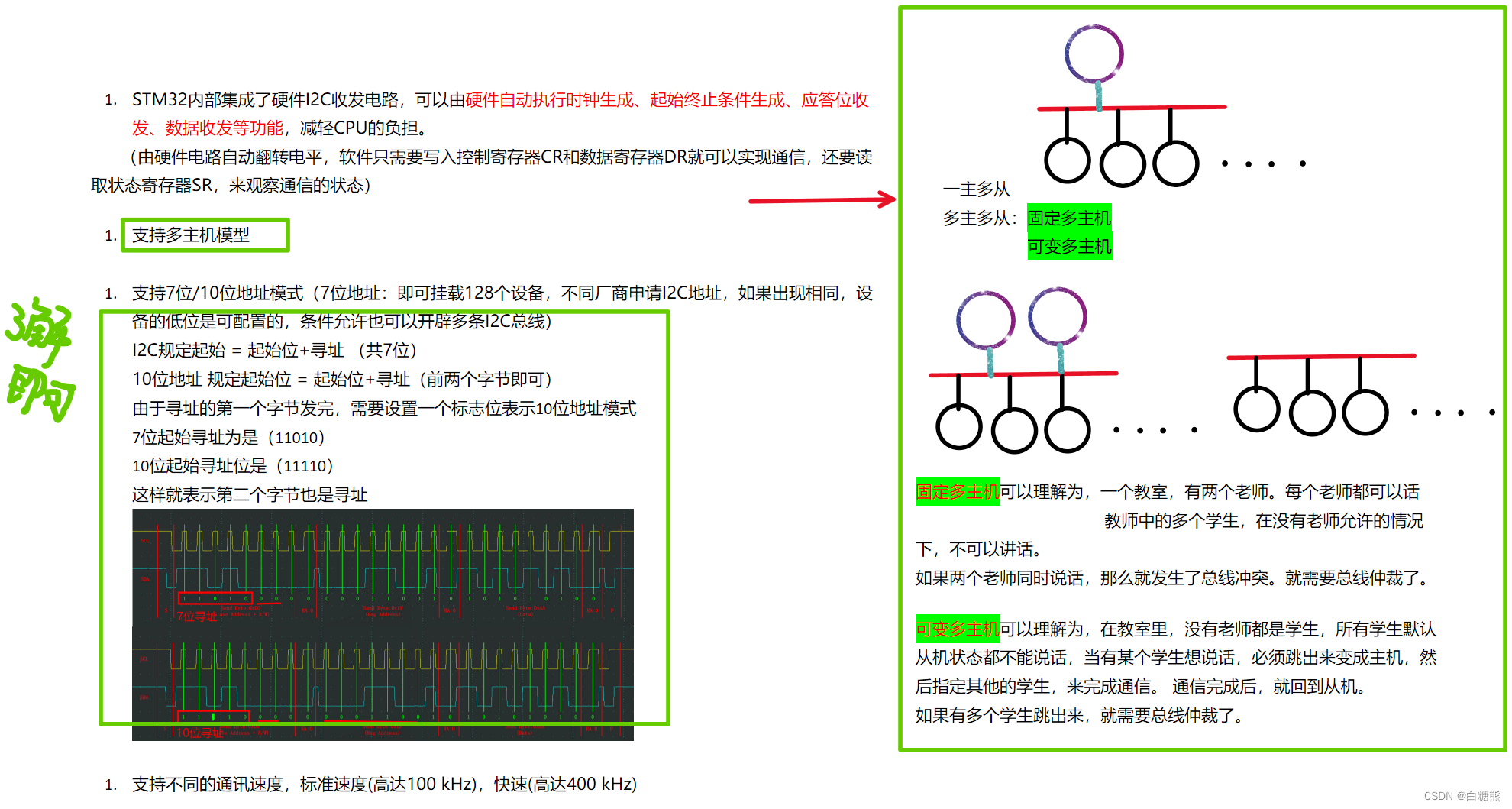
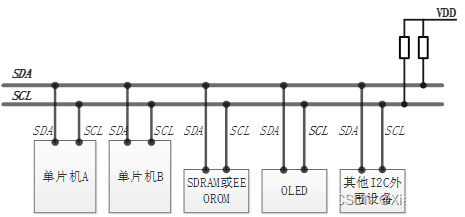
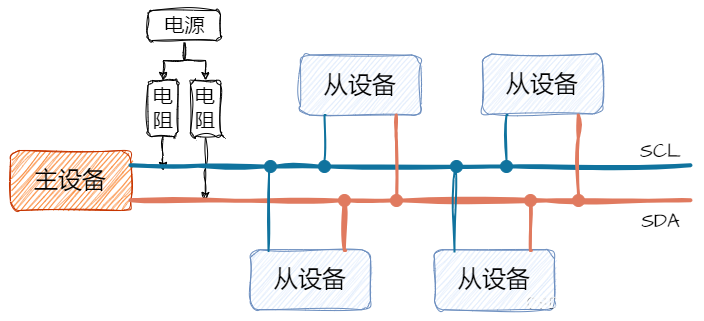
- 这里是一主多从的模式 所以时钟这里只画了输出的方向
序列图
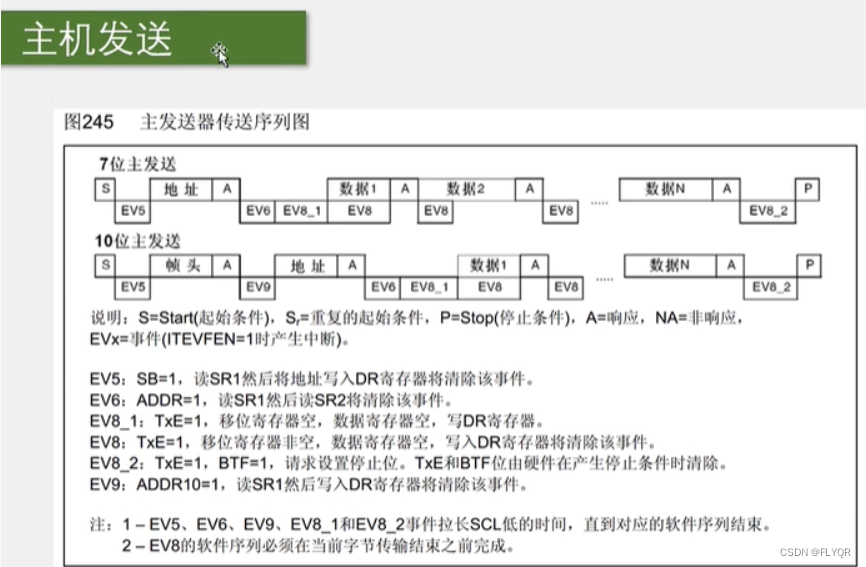
指定地址写
首先初始化之后,总线默认空闲状态,STM32默认是从模式
为了产生一个起始条件,STM32需要写入控制寄存器,在START位写1,STM32就自动产生起始条件
之后STM32由从模式转为主模式 就是多主机模型下,STM32有数据要发,就要跳出来
控制完硬件电路之后,就要检查标志位,来看看硬件有没有达到我们想要的状态
起始条件之后会发生EV5事件,可以把EV5当成标志位 这个手册这里都是用EV(Event)几这个事件来代替标志位的
因为有的状态会同时产生多个标志位,这个EV几事件是组合了多个标志位的一个大标志位
在库函数中也会有对应的,检查EV几事件是否发生的函数,可以当成一个大标志位来理解
当检测其实条件已发送时,就可以发送从机地址了,从机地址需要写到数据寄存器DR中
硬件电路就会自动把这一个字节转到移位寄存器里
再把这一个字节发送到I2C总线上
之后硬件会自动接收应答并判断,如果没有应答硬件会置应答失败的标志位
寻址完成之后,会发生EV6事件,之后是EV8_1事件
- 这时需要我们写入数据寄存器DR,进行数据发送了,一旦写入DR之后,因为移位寄存器也是空,所以DR会立刻转到移位寄存器进行发送
到了EV8事件,这时就是移位寄存器正在发送数据的状态,流程图上,数据1的时序就产生了
这个位置EV8事件没有了,对于EV8写入DR将清除该事件,所以在EV8事件末尾应该是写入了写一个数据
也就是后面的数据2
在这个时刻就被写入到寄存器里等着了
然后在数据1接收到应答之后,数据2就转入移位寄存器进行发送
EV8事件就又发生了
在第二个EV8事件末尾,数据2还正在移位发送
但此时下一个数据已经被写到数据寄存器等着了
所以EV8事件结束
一旦我们检测到EV8事件,就可以写入下一个数据了
最后当我们发送的数据写完之后
这时就没有新的数据可以写入到数据寄存器了
当移位寄存器当前的数据移位完成时,此时就是移位寄存器空数据寄存器也空的状态,就是后面的EV8_2事件
当检测到EV8_2时,就可以产生终止条件了,(控制寄存器CR1中STOP位进行控制停止
硬件I2C读写MPU6050
软件I2C和硬件I2C的区别,在通信的底层,就是之前写的MyI2C.c
把MyI2C模块移出工程
利用硬件I2C外设 来替换这些注释的代码,来实现相同的功能
编码步骤
配置I2C外设,对I2C外设进行初始化,来替换MyI2C_Init
控制外设电路,实现指定地址写的时序
控制外设电路,实现指定地址读的时序
开启I2C外设和对应GPIO口的时钟
把I2C外设对应的GPIO口初始化为复用开漏输出
使用结构体对整个I2C外设进行配置
I2C_Cmd使能I2C,这样初始化配置就完成了
对应的函数
I2C_GenerateSTART 生成起始条件 Start可以通过手册对寄存器描述来了解
I2C_GenerateSTOP 设置Stop位产生停止条件
I2C_AcknowledgeConfig 配置ACK这一位 手册里有相关描述 在收到一个字节后是否给从机应答
I2C_SendData 发送数据 实际就是把Data这个数据直接写到DR寄存器
I2C_ReceiveData 接收数据 读取DR
I2C_Send7bitAddress 发送地址 也可以使用I2C_SendData进行地址发送
在.h下面 库函数给了我们多种监控标志位的方案 Basic state monitoring: I2C_CheckEvent(同时判断一个或多个标志位,来确定EV几这个状态是否发生,和ppt流程是对应的)
Flag-based state monitoring: 标志位的状态监控 I2C_GetFlagStatus() 可以判断某一个标志位是否置1
指定地址写一个字节的时序编码
对应着软件I2C的流程和ppt时序图
硬件I2C函数都不是阻塞式的 这些硬件I2C函数只管给寄存器的位置置1 或者只在DR写入函数,就结束,退出函数,不管波形是否发送完毕 所以对于这种非阻塞时的程序,在函数结束之后,我们都要等待对应的标志位,确保函数的操作执行到位
生成起始条件
等待EV5(也可以叫做主机模式已选择事件)事件的到来 使用状态监控函数 使用I2C_CheckEvent函数 等待SUCCESS
发送从机地址 接收应答 I2C_SendData 和 I2C_Send7bitAddress 都可以完成
接收应答 这里并不需要一个函数来操作 在这个库函数中发送数据都自带了接收应答的过程 同样 发送数据也自带了发送应答的过程
如果应答错误 硬件会通过标志位和中断来提示我们
所以发送地址之后不需要就收应答 直接等待事件
发送完地址之后 等待EV6事件
EV8_1事件是告诉你你该写入DR发送数据了,并不需要等待这个EV8_1事件,库函数参数列表也没有EV8_1事件的参数
直接写入DR发送数据 发送RegAddress 等待EV8事件
继续调用I2C_SendData发送一个字节的数据
发送完Data之后就需要终止了,所以最后这个等待事件有所不同
在连续数据进行发送时,需要等待EV8事件
而当我们发送完最后一个字节数据时,需要等待EV8_2事件
当BTF等于1,就是移位完成了,并且没有新的数据可以发的时候,置BTF也就是EV8_2
使用终止函数
接收一位数据
- 在等待EV6事件之后,要清除响应和停止条件的产生

在这个位置,要把应答位置0,同时把停止条件生成位STOP置1 ,
虽然这时候是应该接收数据,数据都没收到,就要产生停止条件?答案确实如此,这里规定就是在接收一个字节之前,就要提前把ACK置0,同时设置停止位STOP
因为我们目前是接收一个字节
所以在进入接收模式之后,就要立刻ACK置0,STOP置1
如果不提前在数据还么收到的时候给ACK置0,等时序到了接收第二个数据的时候,数据已经收到了,再说要置0,要给非应答,

,这时就晚了,数据收到之前应到位就已经发送出去了这时再给ACK置0,只能实在下一个数据之后给非应答,所以在 最后一个数据之前,就要给ACK置0
在EV6事件之后,配置ACK位和停止位
之后再等待EV7事件,等待EV7事件之后,数据就已经到了DR寄存器里了
可以读取DR寄存器 存到Data变量里
最后把ACK置1,默认状态下就要把ACK置1,给从机应答
在接收数据之前 临时把ACK置0,给非应答
这个流程是为了方便指定地址收多个字节