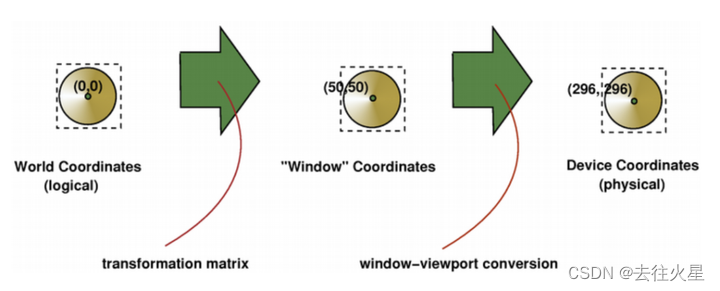
matlab 坐标系变换
- 开发
- 41
-
对象
| 对象 |
含义 |
| se2 |
SE(2)齐次变换矩阵 |
| se3 |
SE(3)齐次变换矩阵 |
| so2 |
SO(2)旋转 |
| so3 |
SO(3)旋转 |
| quaternion |
四元数 |
轴角 axis-angles
| 函数 |
功能 |
| axang2quat |
轴角旋转转为四元数 |
| axang2rotm |
轴角旋转转为旋转矩阵 |
| axang2tform |
轴角旋转转为齐次变换矩阵 |
欧拉角 Euler angles
| 函数 |
功能 |
| eul2quat |
欧拉角转为四元数 |
| eul2rotm |
欧拉角转为旋转矩阵 |
| eul2tform |
欧拉角转为齐次变换矩阵 |
四元数 quaternion
| 函数 |
功能 |
| quat2axang |
四元数转为轴角旋转 |
| quat2eul |
四元数转为欧拉角 |
| quat2rotm |
四元数转为旋转矩阵 |
| quat2tform |
四元数转为齐次变换矩阵 |
旋转矩阵 rotation matrices
| 函数 |
功能 |
| rotm2axang |
旋转矩阵转为轴角旋转 |
| rotm2eul |
旋转矩阵转为欧拉角 |
| rotm2quat |
旋转矩阵转为四元数 |
| rotm2tform |
旋转矩阵转为齐次变换矩阵 |
齐次变换矩阵 Homogeneous Transformation
| 函数 |
功能 |
| tform2axang |
齐次变换矩阵转为轴角旋转 |
| tform2eul |
从齐次变换矩阵提取欧拉角 |
| tform2quat |
从齐次变换矩阵企图四元数 |
| tform2rotm |
从齐次变换矩阵提取旋转矩阵 |
| tform2trvec |
从齐次变换矩阵提取平移向量 |
坐标系换算 Coordinate Conversions
| 函数 |
功能 |
| angdiff |
两个角度的差异 |
| cart2hom |
笛卡尔坐标转换为齐次坐标 |
| hom2cart |
齐次坐标转换为笛卡尔坐标 |
| trvec2tform |
将平移向量转换为齐次变换 |
图变换 Plot Transformations
| 函数 |
功能 |
| plotTransforms |
图3 - D由平移和旋转转换而来 |
原文地址:https://blog.csdn.net/zjh2883/article/details/137246904
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。
本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:https://www.suanlizi.com/kf/1776346089713176576.html
如若内容造成侵权/违法违规/事实不符,请联系《酸梨子》网邮箱:1419361763@qq.com进行投诉反馈,一经查实,立即删除!