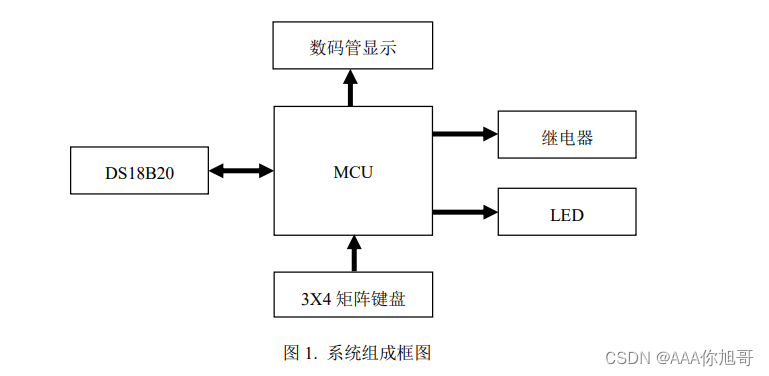
功能简述
模拟“温度采集与控制装置”用于实现温度的实时监测与控制。单片机采集 DS18B20 温度传感器的输出信号,并送到数码管进行显示;通过传感器得到的温度数据将与用户设定 温度上限、下限值做比较,再由单片机启动控制或报警电路。系统硬件部分主要由单片机最 小系统、数码管显示、DS18B20 温度传感器、矩阵键盘等模块组成。系统组成框图如图 1 所示:
单总线驱动程序、CT107D 单片机考试平台电路原理图以及本题所涉及到的芯片数据手 册,可参考计算机上的电子文档。程序流程图及相关工程文件请以考生号命名,并保存在计 算机上的考生文件夹中(文件夹名为考生准考证号,文件夹位于 Windows 桌面上)。
设计任务及要求
1. 温度检测 温度检测采用 DS18B20 温度传感器,数据经过单片机处理后,与用户设定的温度 上限(TMAX)和温度下限(TMIN)比较,确定当前温度所处的区间,数码管温度显 示格式如图 2 所示:

关于温度区间的说明:

当前温度TMAX 可设定的最大温度区间:0℃~99℃
2. 用户输入-3X4 矩阵键盘 通过矩阵键盘设定系统的工作参数,各个按键的功能定义如图 3 所示:

“设置”按键按下后,进入工作参数设定界面,如图 4 所示,依次按下设定的数值, 再次按下“设置”按键,保存当前输入的数据,并退出工作参数设定界面。

以设定 TMAX 为 35 摄氏度,TMIN为 25 摄氏度为例说明参数设定过程:按下“设置” 按键,然后依次按下数字按键“3” “5” “2” “5”如图 5 所示,再次按下“设 置”按键,完成参数设定,并退出参数设定界面。在输入过程中,按下“清除”按 键,将清除当前输入数据,若设定工作参数错误,如 TMAX
<TMIN,L2常亮,修正错误并保存参数后,L2熄灭

3. 执行机构
执行机构由指示灯 L1 和继电器组成,用于报警和连接外部高低温执行机构。
3.1 实时温度处在温度区间 0,继电器关闭,指示灯 L1 以 0.8 秒为间隔闪烁;
3.2 实时温度处在温度区间 1,继电器关闭,指示灯 L1 以 0.4 秒为间隔闪烁;
3.3 实时温度处在温度区间 2,继电器打开,指示灯 L1 以 0.2 秒为间隔闪烁。
4. 初始化状态说明
系统默认的温度上限(TMAX)为 30℃,温度下限(TMIN)为 20℃,可以通过矩阵键盘 修改。
代码参考如下
#include "reg52.h"
#include "intrins.h"
#include "onewire.h"
#define TSMG 500
sfr P4 = 0xc0;
sfr T2H = 0xd6;
sfr T2L = 0xd7;
sfr AUXR = 0x8e;
sfr IE2 = 0xaf;
sbit h1 = P3^0;
sbit h2 = P3^1;
sbit h3 = P3^2;
sbit h4 = P3^3;
sbit s1 = P4^4;
sbit s2 = P4^2;
sbit s3 = P3^5;
sbit s4 = P3^4;
void DisplaySMG_Info();
code unsigned char Seg_Table[] = {0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82,0xf8,
0x80, 0x90, 0x88, 0x83, 0xc6, 0xa1, 0x86,0x8e };
unsigned char temp_value = 0;
unsigned char mystr[4]={3,0,2,0};
unsigned stat_set = 0;
unsigned char UI = 0;
unsigned char value_4 = 0;
unsigned char level = 0;
unsigned char stat_led = 0xff;
unsigned char count_08s = 0;
unsigned char count_04s = 0;
unsigned char count_02s = 0;
unsigned char stat_jdq = 0x00;
unsigned char stat_shan = 0;
void Delay20ms() //@12.000MHz
{
unsigned char i, j, k;
_nop_();
_nop_();
i = 1;
j = 234;
k = 113;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Init_timer2()//10ms
{
AUXR &= 0xfb;
T2L = 0xf0;
T2H = 0xd8;
AUXR |= 0x10;
EA = 1;
IE2 |= 0x04;
}
void Sevice_timer2() interrupt 12
{
DisplaySMG_Info();
if(level == 0)
{
count_08s++;
if(count_08s == 80)
{
count_08s = 0;
if(stat_shan == 0)
{
stat_shan = 1;
}
else
{
stat_shan = 0;
}
}
}
else if(level == 1)
{
count_04s++;
if(count_04s == 40)
{
count_04s = 0;
if(stat_shan == 0)
{
stat_shan = 1;
}
else
{
stat_shan = 0;
}
}
}
if(level == 2)
{
count_02s++;
if(count_02s == 20)
{
count_02s = 0;
if(stat_shan == 0)
{
stat_shan = 1;
}
else
{
stat_shan = 0;
}
}
}
}
void Init_mytemp()
{
unsigned char LSB,MSB;
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
do{
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);
LSB = Read_DS18B20();
MSB = Read_DS18B20();
MSB = (MSB << 4) | (LSB >> 4);
}while(MSB == 85);
}
void read_mytemp()
{
unsigned char LSB,MSB;
unsigned int temp;
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);
LSB = Read_DS18B20();
MSB = Read_DS18B20();
temp = MSB << 8;
temp = temp | LSB;
if((temp & 0xf800) == 0x0000)
{
temp_value = temp * 0.0625;
}
}
void SelectHC573(unsigned char channel,unsigned char dat)
{
P2 = (P2 & 0x1f) | 0x00;
P0 = dat;
switch(channel)
{
case 4:
P2 = (P2 & 0x1f) | 0x80;
break;
case 5:
P2 = (P2 & 0x1f) | 0xa0;
break;
case 6:
P2 = (P2 & 0x1f) | 0xc0;
break;
case 7:
P2 = (P2 & 0x1f) | 0xe0;
break;
case 0:
P2 = (P2 & 0x1f) | 0x00;
break;
}
P2 = (P2 & 0x1f) | 0x00;
}
void DelaySMG(unsigned int t)
{
while(t--);
}
void DisplaySMG_Bit(unsigned char pos,unsigned char value)
{
SelectHC573(6,0x01 << pos);
SelectHC573(7,value);
DelaySMG(TSMG);
SelectHC573(6,0x01 << pos);
SelectHC573(7,0xff);
}
void DisplaySMG_All(unsigned char value)
{
SelectHC573(6,0xff);
SelectHC573(7,value);
}
void DisplaySMG_Info()
{
if(UI == 0)
{
DisplaySMG_Bit(0,0xbf);
DisplaySMG_Bit(1,Seg_Table[level]);
DisplaySMG_Bit(2,0xbf);
DisplaySMG_Bit(6,Seg_Table[temp_value / 10]);
DisplaySMG_Bit(7,Seg_Table[temp_value % 10]);
}
else if(UI == 1)
{
DisplaySMG_Bit(0,0xbf);
DisplaySMG_Bit(1,Seg_Table[mystr[0]]);
DisplaySMG_Bit(2,Seg_Table[mystr[1]]);
DisplaySMG_Bit(5,0xbf);
DisplaySMG_Bit(6,Seg_Table[mystr[2]]);
DisplaySMG_Bit(7,Seg_Table[mystr[3]]);
}
}
void scan_key()
{
s1 = 0;
s2 = s3 = s4 = h1 = h2 = h3 = h4 = 1;
if(h1 == 0)//s7
{
Delay20ms();
if(h1 == 0)
{
if(stat_set == 1)
{
if(value_4 != 4)
{
mystr[value_4++] = 0;
}
}
while(h1 == 0)
{
DisplaySMG_Info();
}
}
}
else if(h2 == 0)//s6
{
Delay20ms();
if(h2 == 0)
{
if(stat_set == 1)
{
if(value_4 != 4)
{
mystr[value_4++] = 3;
}
}
while(h2 == 0)
{
DisplaySMG_Info();
}
}
}
else if(h3 == 0)//s5
{
Delay20ms();
if(h3 == 0)
{
if(stat_set == 1)
{
if(value_4 != 4)
{
mystr[value_4++] = 6;
}
}
while(h3 == 0)
{
DisplaySMG_Info();
}
}
}
else if(h4 == 0)//s4
{
Delay20ms();
if(h4 == 0)
{
if(stat_set == 1)
{
if(value_4 != 4)
{
mystr[value_4++] = 9;
}
}
while(h4 == 0)
{
DisplaySMG_Info();
}
}
}
s2 = 0;
s1 = s3 = s4 = h1 = h2 = h3 = h4 = 1;
if(h1 == 0)//s11
{
Delay20ms();
if(h1 == 0)
{
if(stat_set == 1)
{
if(value_4 != 4)
{
mystr[value_4++] = 1;
}
}
while(h1 == 0)
{
DisplaySMG_Info();
}
}
}
else if(h2 == 0)//s10
{
Delay20ms();
if(h2 == 0)
{
if(stat_set == 1)
{
if(value_4 != 4)
{
mystr[value_4++] = 4;
}
}
while(h2 == 0)
{
DisplaySMG_Info();
}
}
}
else if(h3 == 0)//s9
{
Delay20ms();
if(h3 == 0)
{
if(stat_set == 1)
{
if(value_4 != 4)
{
mystr[value_4++] = 7;
}
}
while(h3 == 0)
{
DisplaySMG_Info();
}
}
}
else if(h4 == 0)//s8
{
Delay20ms();
if(h4 == 0)
{
UI = 1;
stat_set++;
if(stat_set == 2)
{
stat_set = 0;
UI = 0;
value_4 = 0;
}
while(h4 == 0)
{
DisplaySMG_Info();
}
}
}
s3 = 0;
s2 = s1 = s4 = h1 = h2 = h3 = h4 = 1;
if(h1 == 0)//s15
{
Delay20ms();
if(h1 == 0)
{
if(stat_set == 1)
{
if(value_4 != 4)
{
mystr[value_4++] = 2;
}
}
while(h1 == 0)
{
DisplaySMG_Info();
}
}
}
else if(h2 == 0)//s14
{
Delay20ms();
if(h2 == 0)
{
if(stat_set == 1)
{
if(value_4 != 4)
{
mystr[value_4++] = 5;
}
}
while(h2 == 0)
{
DisplaySMG_Info();
}
}
}
else if(h3 == 0)//s13
{
Delay20ms();
if(h3 == 0)
{
if(stat_set == 1)
{
if(value_4 != 4)
{
mystr[value_4++] = 8;
}
}
while(h3 == 0)
{
DisplaySMG_Info();
}
}
}
else if(h4 == 0)//s12
{
Delay20ms();
if(h4 == 0)
{
value_4 = 0;
mystr[0] = 0;
mystr[1] = 0;
mystr[2] = 0;
mystr[3] = 0;
while(h4 == 0)
{
DisplaySMG_Info();
}
}
}
}
void led_control()
{
if((mystr[0]*10+mystr[1]) < (mystr[2]*10+mystr[3]))
{
stat_led &= 0xfd;
SelectHC573(4,stat_led);
}
else
{
stat_led |= 0x02;
SelectHC573(4,stat_led);
}
if(stat_shan == 0)
{
stat_led &= 0xfe;
SelectHC573(4,stat_led);
}
else
{
stat_led |= 0x01;
SelectHC573(4,stat_led);
}
}
void temp_level()
{
if(temp_value < (mystr[2]*10+mystr[3]))
{
level = 0;
stat_jdq &= 0xef;
SelectHC573(5,stat_jdq);
}
else if(((mystr[2]*10+mystr[3]) <= temp_value) && (temp_value <= (mystr[0]*10+mystr[1])))
{
level = 1;
stat_jdq &= 0xef;
SelectHC573(5,stat_jdq);
}
else if(temp_value > (mystr[0]*10+mystr[1]))
{
level = 2;
stat_jdq |= 0x10;
SelectHC573(5,stat_jdq);
}
}
void main()
{
Init_mytemp();
Init_timer2();
SelectHC573(5,0x00);
SelectHC573(4,0xff);
DisplaySMG_All(0xff);
while(1)
{
read_mytemp();
scan_key();
led_control();
temp_level();
}
}































![[lesson06]内联函数分析](https://img-blog.csdnimg.cn/direct/ae0ebe3325114095888dd12f47782de5.png#pic_center)
