一、代码
Python
import numpy as np
import open3d as o3d
def compute_harris_keypoints_optimized(point_cloud, rad, thresh):
if not point_cloud.has_normals():
point_cloud.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=30))
# 创建KD树
kdtree = o3d.geometry.KDTreeFlann(point_cloud)
points = np.asarray(point_cloud.points)
num_points = points.shape[0]
harris_responses = np.zeros(num_points)
keypoints_idx = []
# 使用向量化计算协方差矩阵和Harris响应
for i in range(num_points):
[_, idx, _] = kdtree.search_radius_vector_3d(point_cloud.points[i], rad)
if len(idx) >= 3:
neighbors = points[idx, :]
# 减去均值以进行去中心化
neighbor_shifted = neighbors - neighbors.mean(axis=0)
# 计算去中心化之后的协方差矩阵
cov = np.dot(neighbor_shifted.T, neighbor_shifted) / len(neighbor_sh




















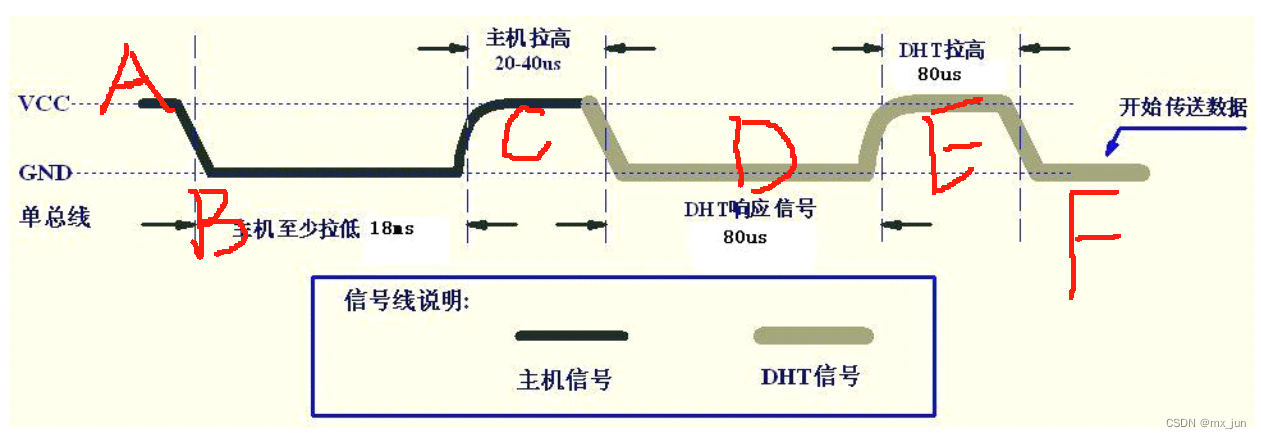
![[Arduino学习] ESP8266读取DHT11数字温湿度传感器数据](https://img-blog.csdnimg.cn/img_convert/fed94fb76568ada8c24b60b46f993b00.png)