can总线相关理论
1. 概念
控制器局域网(Controller Area Network,CAN),其特点是可拓展性好,可承受大量数据的高速通信,高度稳定可靠,因此常应用于汽车电子领域、工业自动化、医疗设备等高要求环境。
CAN是异步通讯,只有CAN_High和CAN_Low两条信号线,且这两条信号线是差分信号线,以差分信号的形式通讯;
CAN是半双工的,在同一时刻,一个通讯节点发送消息,其他节点只能接收消息
2. can分类和硬件连接
CAN总线有两个ISO国际标准:ISO11519 和ISO11898
ISO11519定义了通信速率为10~125Kbps的低速CAN通信标准,属于开环总线,传输速率为40Kbps时,总线长度可达1000米;
ISO11898定义了通信速率为125Kbps~1 Mbps的高速CAN通信标准,属于闭环总线,传输速率可达1Mbps,总线长度≤40米;
3. can总线的数据传输方式
CAN也使用差分信号传输数据。CAN总线使用CAN_H和CAN_L的电位差来表示数据电平。电位差分为显性电平和隐性电平,分别表示逻辑0和1。
差分信号:两根信号线的幅度相同,相位相反,通过电压差代表电平1和0;差分信号优点:抗干扰能力强,因为有外界噪声干扰时,会同时耦合到这两条信号线上,由于接收端只关心信号的差值,因此噪声可以抵消。
逻辑电平为1是隐性电平,CAN_High和CAN_Low电压都是2.5v,压差为0;逻辑电平为0显性电平,CAN_High电压3.5v和CAN_Low电压1.5v,压差2v。
4. can总线通信协议
4.1 CAN 的波特率及位同步
由于 CAN 属于异步通讯,没有时钟信号线,连接在同一个总线网络中的各个节点会像串口异步通讯那样,节点间使用约定好的波特率进行通讯,特别地, CAN 还会使用“位同步”的方式来抗干扰、吸收误差,实现对总线电平信号进行正确的采样,确保通讯正常。
4.2 位时序分解
为了实现位同步,CAN 协议把每一个数据位的时序分解成如图 所示的 SS 段、PTS 段、PBS1 段、PBS2 段,这四段的长度加起来即为一个 CAN 数据位的长度。分解后最小的时间单位是 Tq,而一个完整的位由 8~25 个 Tq 组成。为方便表示,图中的高低电平直接代表信号逻辑 0 或逻辑 1(不是差分信号)。

该图中表示的 CAN 通讯信号每一个数据位的长度为 19Tq,其中 SS 段占 1Tq, PTS 段占 6Tq, PBS1段占 5Tq, PBS2 段占 7Tq。信号的采样点位于 PBS1 段与 PBS2 段之间,通过控制各段的长度,可以对采样点的位置进行偏移,以便准确地采样。
各段的作用如介绍下:
• SS 段 (SYNC SEG)
SS 译为同步段,若通讯节点检测到总线上信号的跳变沿被包含在 SS 段的范围之内,则表示节点与总线的时序是同步的,当节点与总线同步时,采样点采集到的总线电平即可被确定为该位的电平。SS 段的大小固定为 1Tq。
• PTS 段 (PROP SEG)
PTS 译为传播时间段,这个时间段是用于补偿网络的物理延时时间。是总线上输入比较器延时和输出驱动器延时总和的两倍。PTS 段的大小可以为 1~8Tq。
• PBS1 段 (PHASE SEG1)
PBS1 译为相位缓冲段,主要用来补偿边沿阶段的误差,它的时间长度在重新同步的时候可以加长。PBS1 段的初始大小可以为 1~8Tq。
• PBS2 段 (PHASE SEG2)
PBS2 这是另一个相位缓冲段,也是用来补偿边沿阶段误差的,它的时间长度在重新同步时可以缩短。PBS2 段的初始大小可以为 2~8Tq。
4.3 通讯的波特率
总线上的各个通讯节点只要约定好 1 个 Tq 的时间长度以及每一个数据位占据多少个 Tq,就可以确定 CAN 通讯的波特率。
例如,假设上图中的 1Tq=1us,而每个数据位由 19 个 Tq 组成,则传输一位数据需要时间 T1bit=19us,从而每秒可以传输的数据位个数为:1x10次方/19 = 52631.6 (bps)
这个每秒可传输的数据位的个数即为通讯中的波特率
4.4 CAN 的报文种类及结构
为了更有效地控制通讯,CAN 一共规定了 5 种类型的帧

数据帧的结构
数据帧是在 CAN 通讯中最主要、最复杂的报文

数据帧以一个显性位 (逻辑 0) 开始,以 7 个连续的隐性位 (逻辑 1) 结束,在它们之间,分别有仲裁段、控制段、数据段、CRC 段和 ACK 段。
• 帧起始
SOF 段 (Start OfFrame),译为帧起始,帧起始信号只有一个数据位,是一个显性电平,它用于通知各个节点将有数据传输,其它节点通过帧起始信号的电平跳变沿来进行硬同步。
• 仲裁段
当同时有两个报文被发送时,总线会根据仲裁段的内容决定哪个数据包能被传输,这也是它名称的由来。
仲裁段的内容主要为本数据帧的 ID 信息 (标识符),数据帧具有标准格式和扩展格式两种,区别就在于 ID 信息的长度,标准格式的 ID 为 11 位,扩展格式的 ID 为 29 位,它在标准 ID 的基础上多出 18 位。在 CAN 协议中, ID 起着重要的作用,它决定着数据帧发送的优先级,也决定着其它节点是否会接收这个数据帧。CAN 协议不对挂载在它之上的节点分配优先级和地址,对总线的占有权是由信息的重要性决定的,即对于重要的信息,我们会给它打包上一个优先级高的 ID,使它能够及时地发送出去。也正因为它这样的优先级分配原则,使得 CAN 的扩展性大大加强,在总线上增加或减少节点并不影响其它设备。报文的优先级,是通过对 ID 的仲裁来确定的。根据前面对物理层的分析我们知道如果总线上同时出现显性电平和隐性电平,总线的状态会被置为显性电平,CAN 正是利用这个特性进行仲裁。
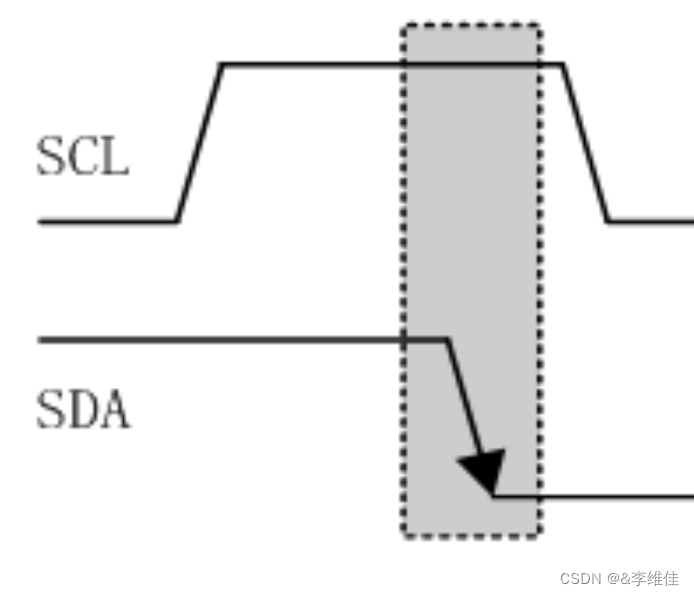
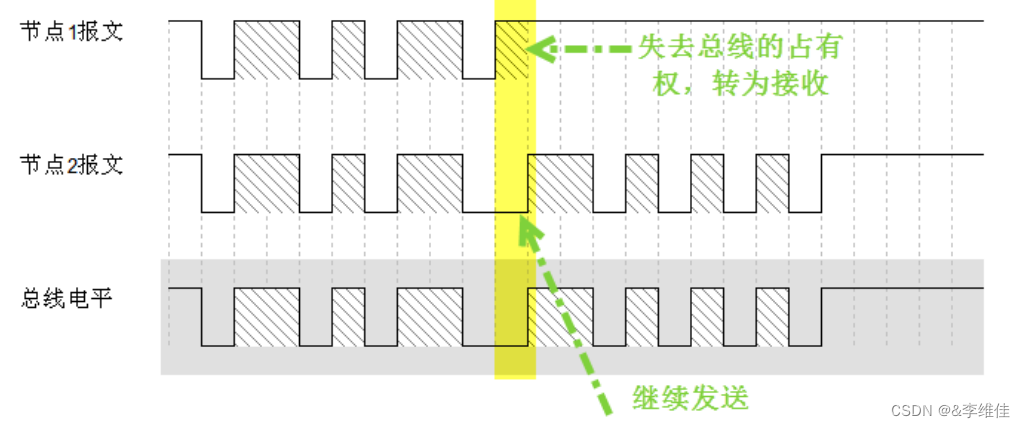
若两个节点同时竞争 CAN 总线的占有权,当它们发送报文时,若首先出现隐性电平,则会失去对总线的占有权,进入接收状态。见图 ,在开始阶段,两个设备发送的电平一样,所以它们一直继续发送数据。到了图中箭头所指的时序处,节点单元 1 发送的为隐性电平,而此时节点单元 2 发送的为显性电平,由于总线的“线与”特性使它表达出显示电平,因此单元 2 竞争总线成功,这个报文得以被继续发送出去。
仲裁段 ID 的优先级也影响着接收设备对报文的反应。因为在 CAN 总线上数据是以广播的形式发送的,所有连接在 CAN 总线的节点都会收到所有其它节点发出的有效数据,因而我们的 CAN
控制器大多具有根据 ID 过滤报文的功能,它可以控制自己只接收某些 ID 的报文。回看数据帧格式,可看到仲裁段除了报文 ID 外,还有 RTR、IDE 和 SRR 位。
(1) RTR 位 (Remote Transmission Request Bit),译作远程传输请求位,它是用于区分数据帧和遥控帧的,当它为显性电平时表示数据帧,隐性电平时表示遥控帧。
(2) IDE 位 (Identifier ExtensionBit),译作标识符扩展位,它是用于区分标准格式与扩展格式,当它为显性电平时表示标准格式,隐性电平时表示扩展格式。
(3) SRR 位 (Substitute Remote Request Bit),只存在于扩展格式,它用于替代标准格式中的 RTR位。由于扩展帧中的 SRR 位为隐性位,RTR 在数据帧为显性位,所以在两个 ID 相同的标准格式报文与扩展格式报文中,标准格式的优先级较高。
• 控制段
在控制段中的 r1 和 r0 为保留位,默认设置为显性位。它最主要的是 DLC 段 (Data Length Code),译为数据长度码,它由 4 个数据位组成,用于表示本报文中的数据段含有多少个字节, DLC 段表示的数字为 0~8。
• 数据段
数据段为数据帧的核心内容,它是节点要发送的原始信息,由 0~8 个字节组成,MSB 先行。
• CRC 段
为了保证报文的正确传输,CAN 的报文包含了一段 15 位的 CRC 校验码,一旦接收节点算出的CRC 码跟接收到的 CRC 码不同,则它会向发送节点反馈出错信息,利用错误帧请求它重新发送。CRC 部分的计算一般由 CAN 控制器硬件完成,出错时的处理则由软件控制最大重发数。在 CRC 校验码之后,有一个 CRC 界定符,它为隐性位,主要作用是把 CRC 校验码与后面的 ACK段间隔起来。
• ACK 段
ACK 段包括一个 ACK 槽位,和 ACK 界定符位。类似 I2C 总线,在 ACK 槽位中,发送节点发送的是隐性位,而接收节点则在这一位中发送显性位以示应答。在 ACK 槽和帧结束之间由 ACK 界定符间隔开。
• 帧结束
EOF 段 (End Of Frame),译为帧结束,帧结束段由发送节点发送的 7 个隐性位表示结束。