前言
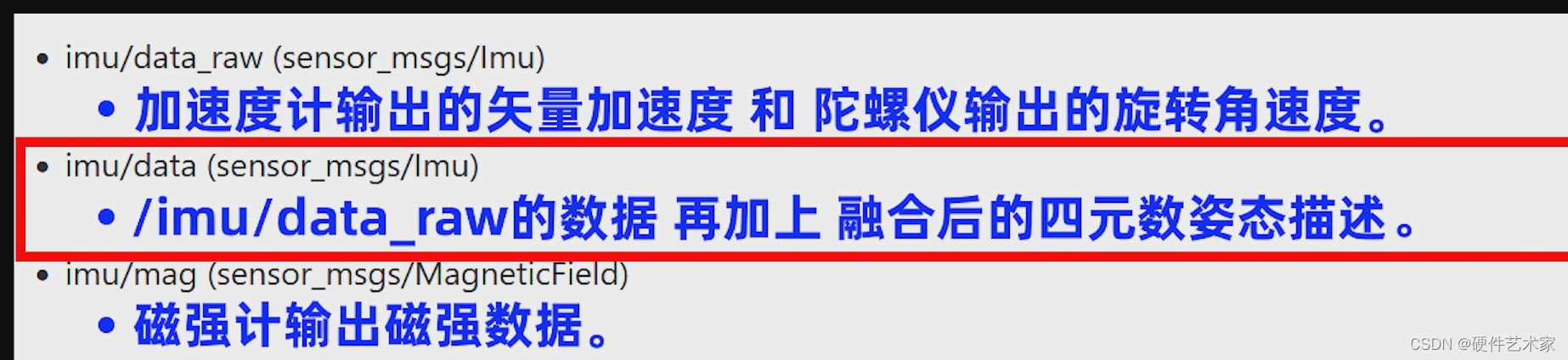
IMU消息包数据格式
继了解了IMU消息包的数据格式后,接下来便是掌握如何通过C++获取IMU的数据
一、IMU设备话题
一般的应用里,通常订阅的是第二个话题
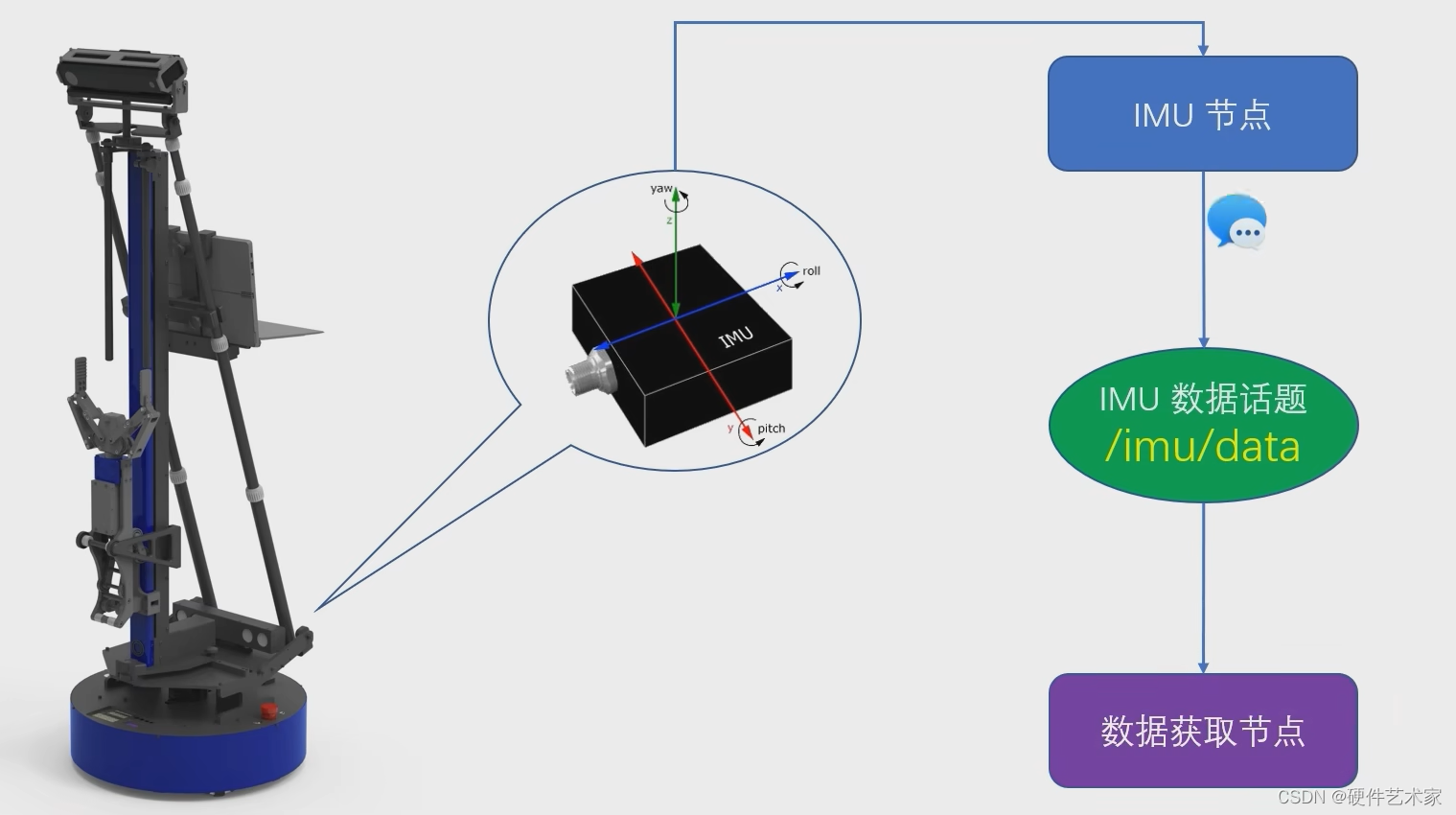
二、实现思路
编写一个节点,订阅IMU数据话题,就能获取到IMU数据了
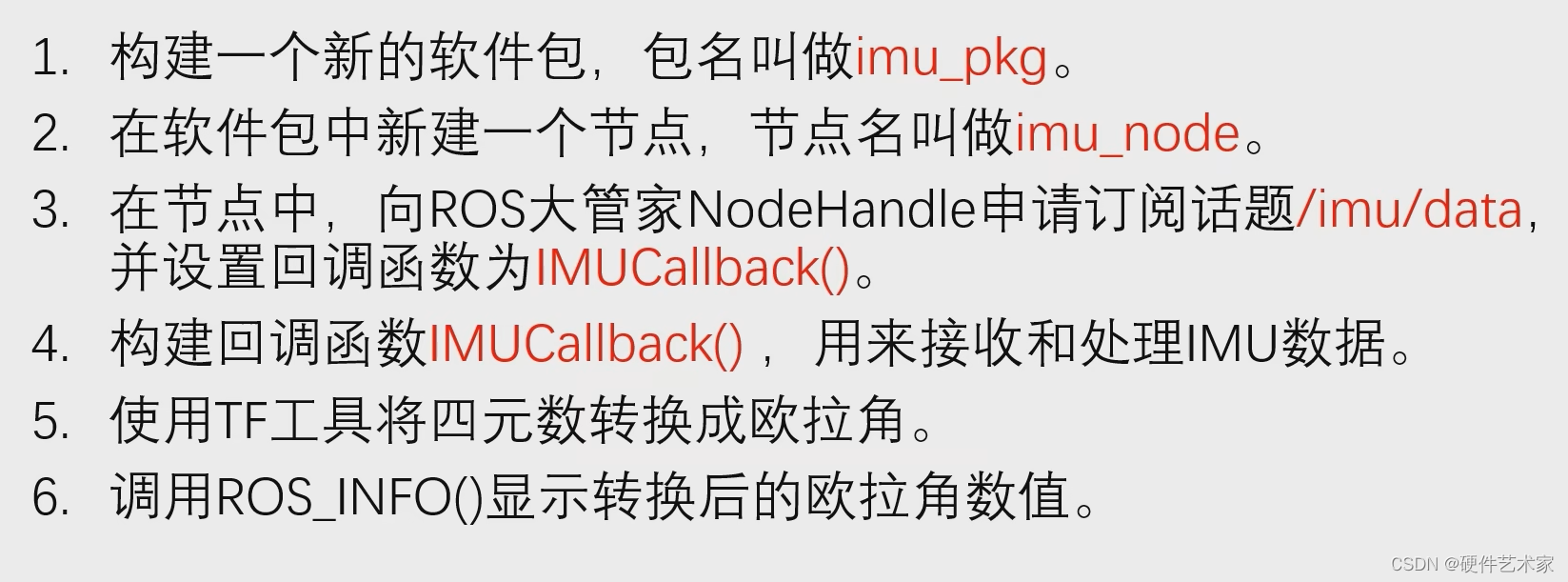
三、实现步骤
四、开始操作
1、打开一个终端,输入cd catkin_ws1/src/ 进入工作空间
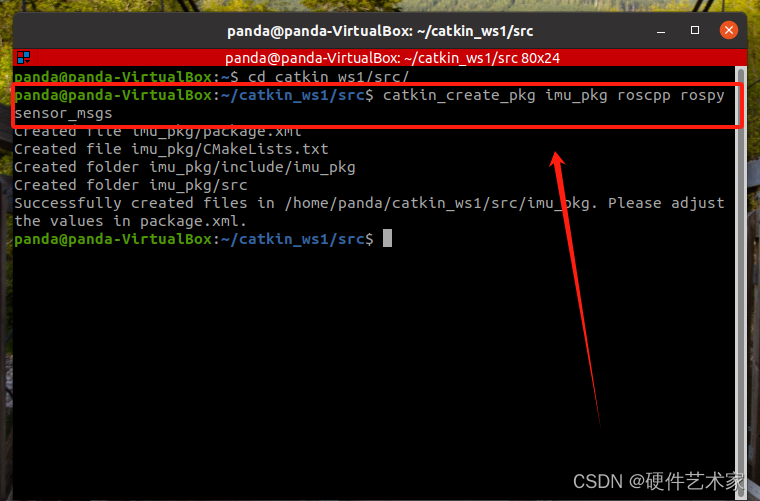
2、输入 catkin_create_pkg imu_pkg roscpp rospy sensor_msgs 创建软件包,包名叫做imu_pkg,依赖项里加入了包含IMU消息格式的sensor_msgs
3、输入code . 打开VScode
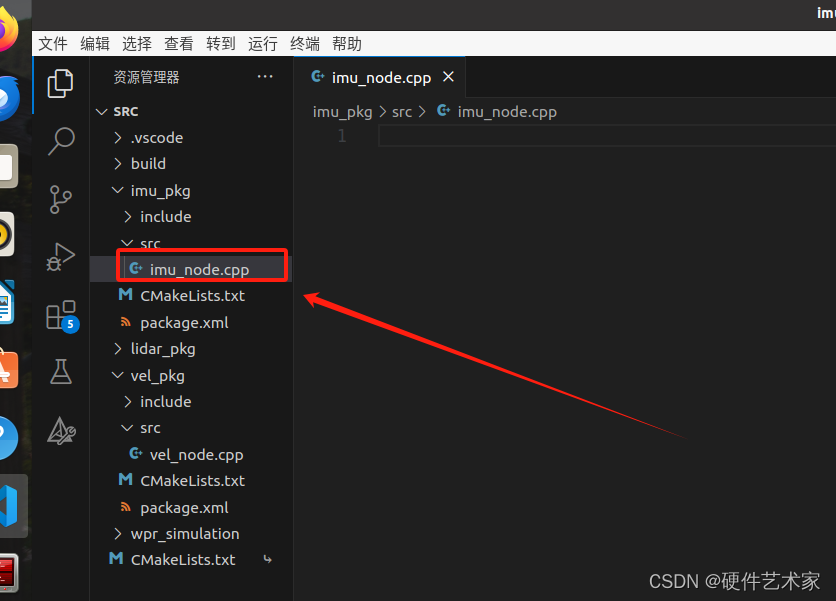
4、在刚刚创建的imu_pkg软件包下的src目录下新建一个节点文件
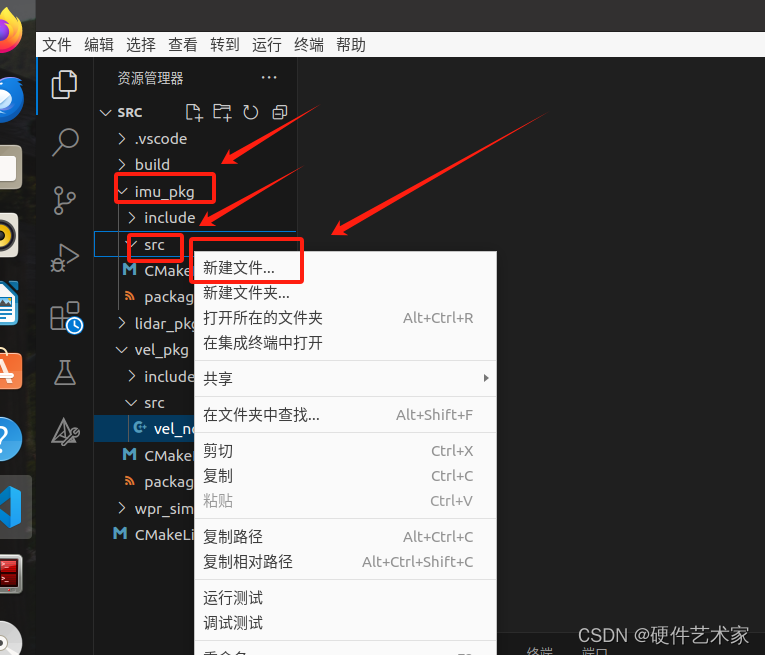
5、名字叫做imu_node.cpp
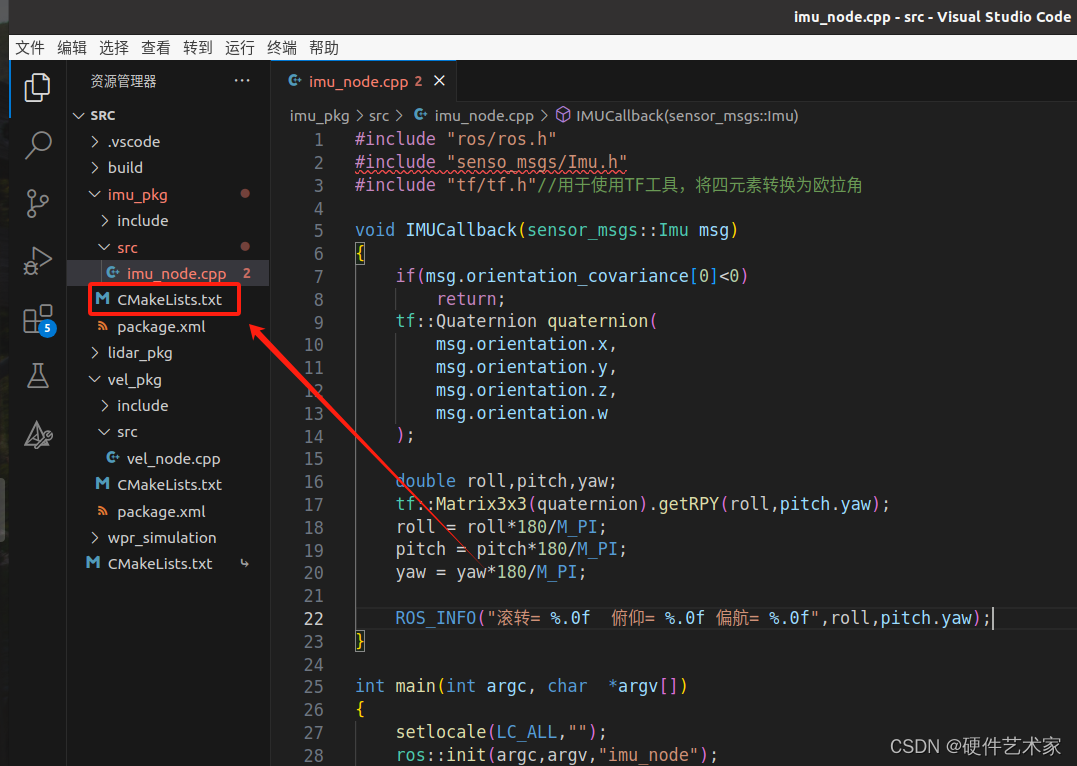
6、在imu_node.cpp文件中写入如下代码
#include "ros/ros.h" //包含ros头文件
#include "sensor_msgs/Imu.h" //包含sensor_msgs/Imu消息类型头文件
#include "tf/tf.h"//用于使用TF工具,将四元素转换为欧拉角
void IMUCallback(sensor_msgs::Imu msg) //IMU消息回调函数
{
if(msg.orientation_covariance[0]<0) //检查协方差,确保数据有效性
return; //如果协方差小于0,数据无效,直接返回
tf::Quaternion quaternion( //创建四元素
msg.orientation.x, //从IMU消息中获取四元素数据
msg.orientation.y,
msg.orientation.z,
msg.orientation.w
);
double roll,pitch,yaw; //定义滚转、俯仰、偏航角
tf::Matrix3x3(quaternion).getRPY(roll,pitch,yaw);// 利用TF库将四元数转换为欧拉角
roll = roll*180/M_PI; // 弧度转换为角度
pitch = pitch*180/M_PI; // 弧度转换为角度
yaw = yaw*180/M_PI; // 弧度转换为角度
ROS_INFO("滚转= %.0f 俯仰= %.0f 偏航= %.0f",roll,pitch,yaw); // 打印欧拉角
}
int main(int argc, char *argv[]) // 主函数
{
setlocale(LC_ALL,""); // 设置本地区域选项
ros::init(argc,argv,"imu_node"); // 初始化ROS节点
ros::NodeHandle n; // 创建节点句柄
ros::Subscriber imu_sub = n.subscribe("/imu/data",10,IMUCallback); // 创建imu_sub订阅者,订阅IMU数据消息
ros::spin();// 进入自发循环,阻塞程序直至节点关闭
return 0;
}
五、给节点设置编译规则
1、打开imu_pkg里的CMakeLists.txt文件
2、CMakeLists.txt文件末尾添加如下代码
add_executable(imu_node src/imu_node.cpp)
add_dependencies(imu_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(imu_node
${catkin_LIBRARIES}
)
3、Ctrl+Shift+B进行编译(记得先保存再编译),编译成功
六、运行节点程序
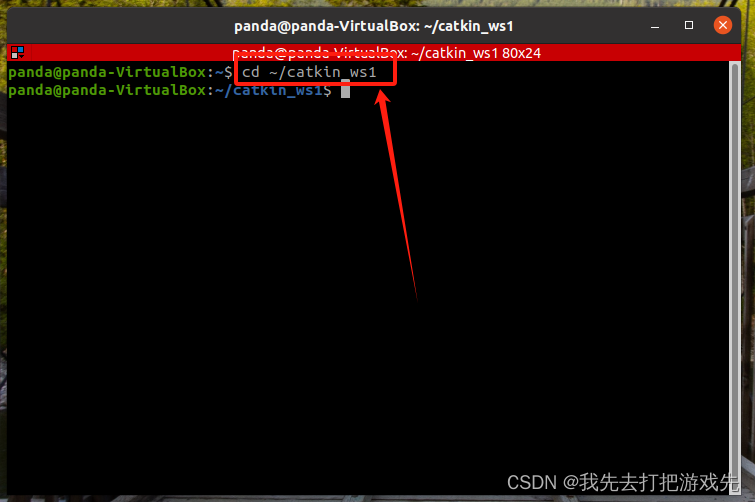
1、再打开一个终端,输入cd ~/catkin_ws1进入工作空间
2、输入source ./devel/setup.bash,设置ROS的环境变量,以便在当前的终端窗口中正确运行ROS软件包。
3、输入roslaunch wpr_simulation wpb_simple.launch启动机器人仿真环境
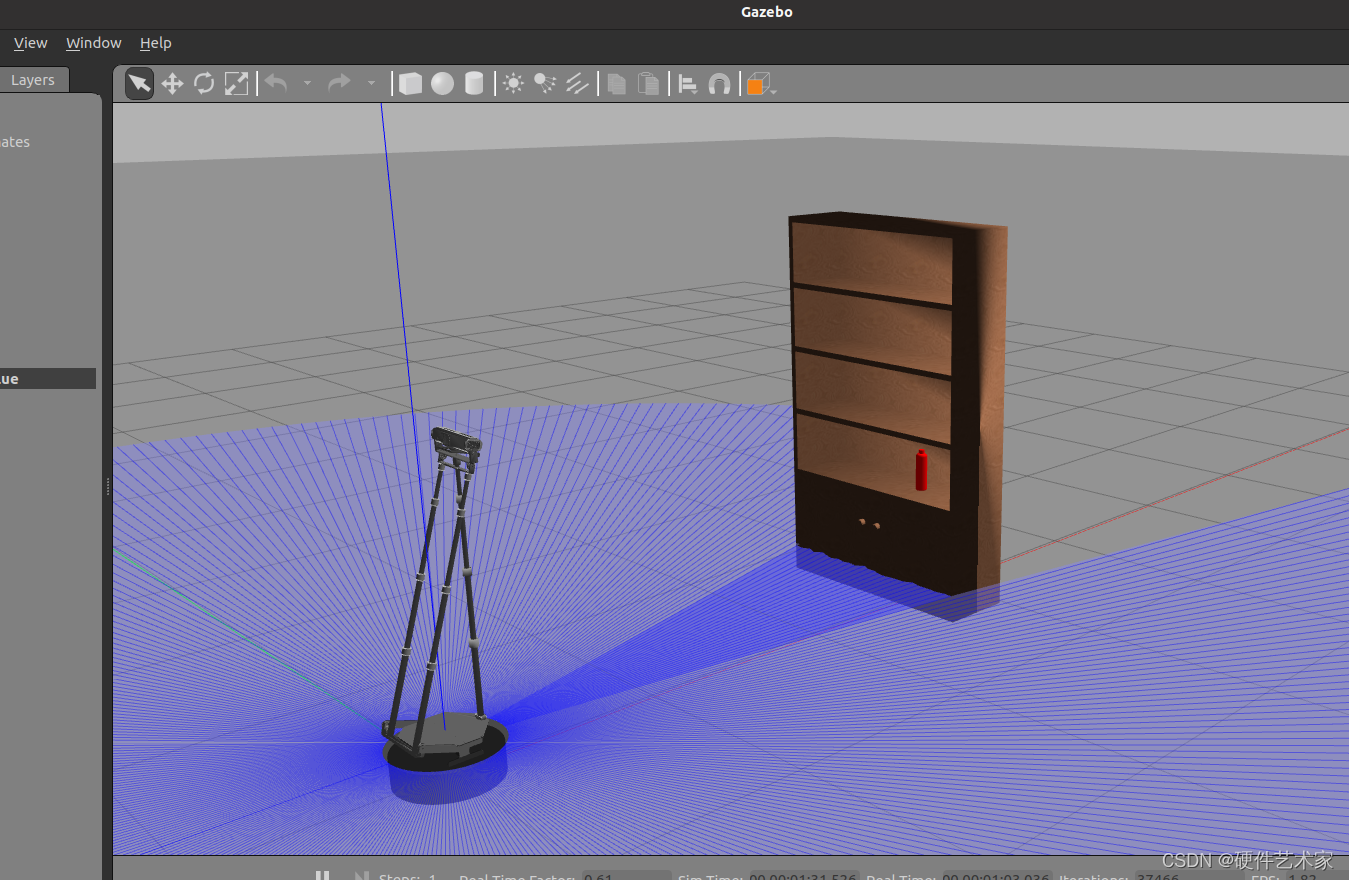
4、机器人仿真环境启动成功
5、再打开一个终端,进入工作空间
6、输入source ./devel/setup.bash,设置ROS的环境变量,以便在当前的终端窗口中正确运行ROS软件包。
7、输入rosrun imu_pkg imu_node,运行imu_node节点程序
8、可以看到当前三个欧拉角都是0

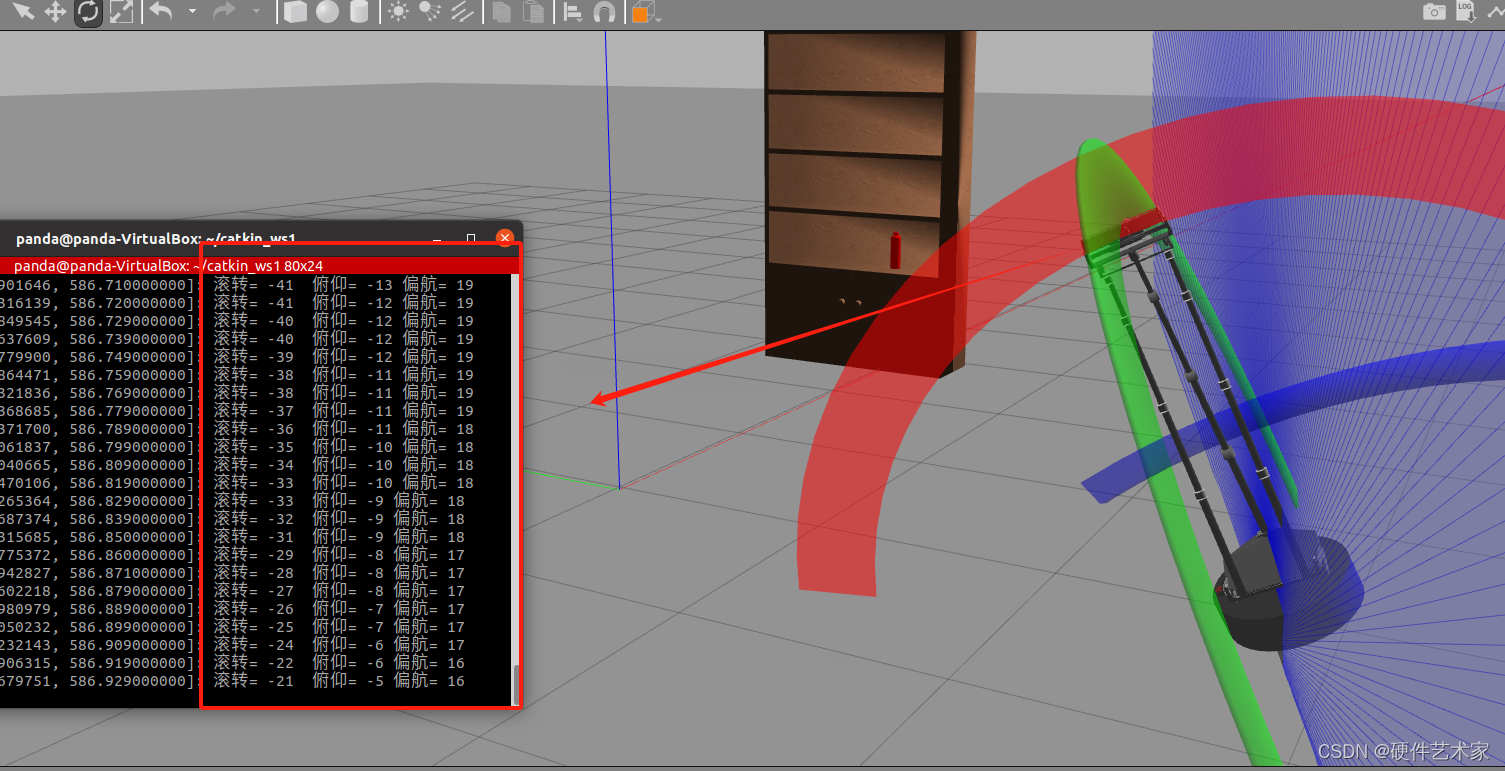
9、回到Gazebo机器人仿真环境,先点旋转按钮,再点机器人
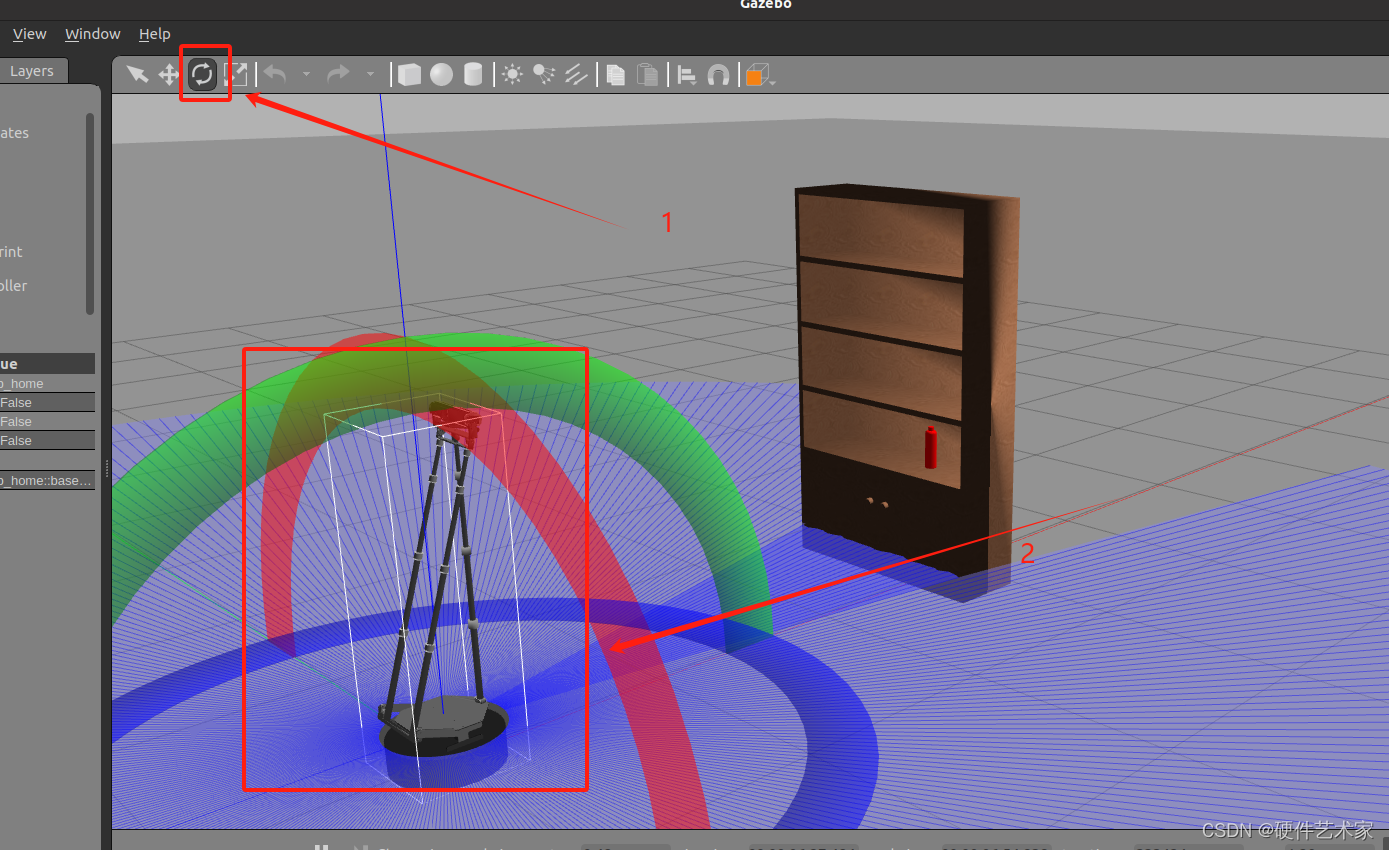
10、随意拖动旋转机器人,可以看到欧拉角相应的变化,至此,成功的获取了机器人的姿态信息