由于最近在整理单目测距的内容,顺手也总结下鱼眼相机的测距流程和误差分析,如果有错误,还请不吝赐教。
参考链接:
鱼眼镜头的成像原理到畸变矫正(完整版)
相机模型总结(针孔、鱼眼、全景)
三维空间中判断射线与平面是否相交
相机外参标定误差对目标测距的影响分析(待整理)
像素坐标转到世界坐标时相机坐标系中的Zc值求解
一文简要介绍鱼眼镜头/相机投影成像过程
一文详解分析鱼眼相机投影成像模型和畸变模型
相机模型-鱼眼模型(fisheye camera model)
SLAM 中常用的相机模型&畸变模型总结
最后两位大哥写的特别好,原理部分写的很详细也很全,我就不打算复制粘贴了,我从归一化坐标开始写,感谢大佬们的无私奉献!!
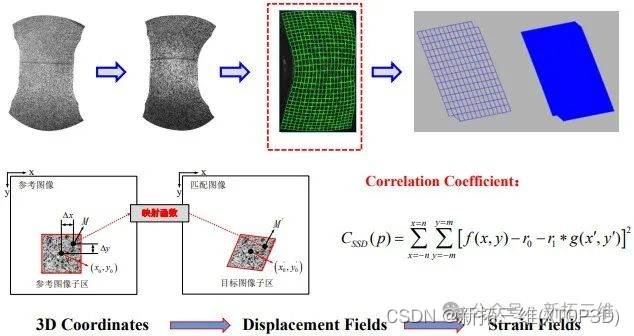
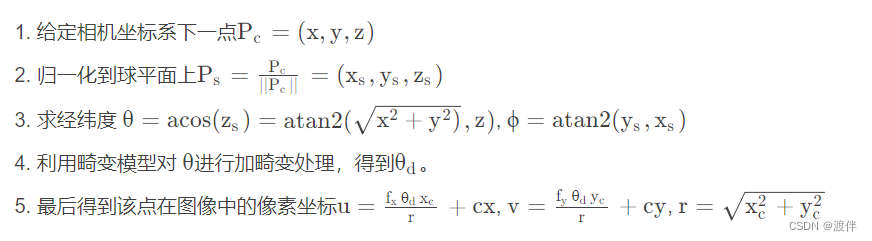
投影过程
反投影过程
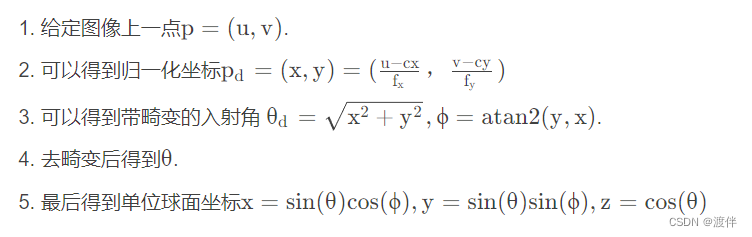
我这里是像素坐标系转世界坐标系,对应的反投影过程,到第五步已经得到单位球面坐标系里的位置。
这里分两种方法:
- 根据 像素坐标转到世界坐标时相机坐标系中的Zc值求解 这位作者写的,先计算出Zc的值,再根据像素坐标算出世界坐标系的位置,作者也给出了python的代码,目前我觉得思路没啥问题。
- 推导从相机光心出发,通过像素点(u, v)的射线与地面的交点,解出交点,这个交点就是像素坐标系转到世界坐标系的位置。