ROS下控制无人机任任意方向下往机头方向飞行
- 开发
- 29
-
引言:再一些比赛或者其他应用场景下,无人机需要程序设置按照机头方向正前方飞行。由于ROS下采用ENU坐标系,PX4采用NED坐标系,因此我们在写程序代码的时候,往往需要现根据角度和距离算出X,Y坐标位置才能让无人机到达准确的位置,这就导致了代码适用性有限。目前我们提供两种方案进行,一种是采用global全局的经纬度坐标系进行任务点飞行,另一种则是根据距离和任意偏航角度直接算出XY坐标。本文主要是介绍第二种方式的坐标转换和控制过程。
场景:假设有如下需求:目前有一个比赛,场地方向未知,需要无人机在放到起飞点后,无人机向前飞行30米,然后识别地标并进行投放。
控制方案如下:
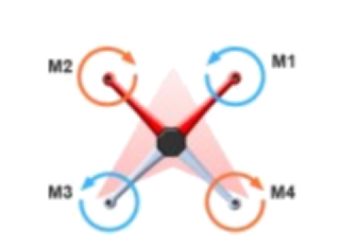
1、无人机任意方向放置后,通过程序获取初始放置的偏航监督yaw
2、结合距离L,计算出相对ROS的ENU坐标系下的XY位置
公式如下:
X = L*cos(yaw)
Y = L*sin(yaw)
3、保持角度和目标位置飞行
4、识别到目标后,控制无人机以机体坐标系进行运动
5、运动到目标正上方后,投放物体即可
源码和视频后续更新
原文地址:https://blog.csdn.net/qq_35598561/article/details/136198357
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。
本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:https://www.suanlizi.com/kf/1760209755172900864.html
如若内容造成侵权/违法违规/事实不符,请联系《酸梨子》网邮箱:1419361763@qq.com进行投诉反馈,一经查实,立即删除!