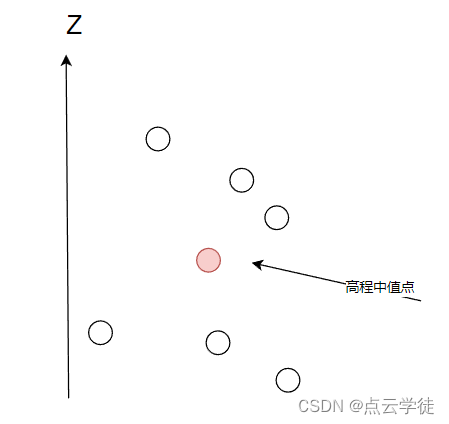
读取的点云是无序散乱的,点云坐标包括xyz三个维度,以常用的z高程维度为例,计算其高程中值,获取对应的点。 主要涉及到根据高程对点云进行排序的操作,下面是具体的代码和结果。
#include <iostream> #includ