PCL点云处理之四点确定球心和半径(克拉默法则C++) (二百二十九)
- 开发
- 40
-
PCL点云处理之四点确定球心和半径(克拉默法则C++) (二百二十九)
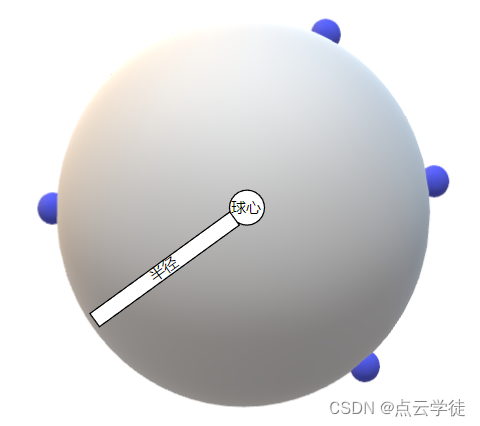
一、算法介绍
相比于计算点坐标均值作为球心和某点到均值距离作为半径的快速计算法,这里介绍的方法更加适合精度要求较高的四点定球计算,下面是具体的实现代码,C++编写,无依赖库,可直接运行,并在主函数中设置了四个点作为验证输入,证明最后的结果是否准确。
二、算法实现
1.代码
代码如下(示例):
#include <iostream>
原文地址:https://blog.csdn.net/weixin_44329757/article/details/136636879
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。
本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:https://www.suanlizi.com/kf/1767305004722556928.html
如若内容造成侵权/违法违规/事实不符,请联系《酸梨子》网邮箱:1419361763@qq.com进行投诉反馈,一经查实,立即删除!



















![蓝桥杯[OJ 3791]—珠宝的最大交替和—CPP-贪心](https://img-blog.csdnimg.cn/direct/d4998200945d4ceb93ed31d51e9d04b0.png)