目录
4.1车辆路径问题(Vehicle Routing Problem, VRP)概述
1.程序功能描述
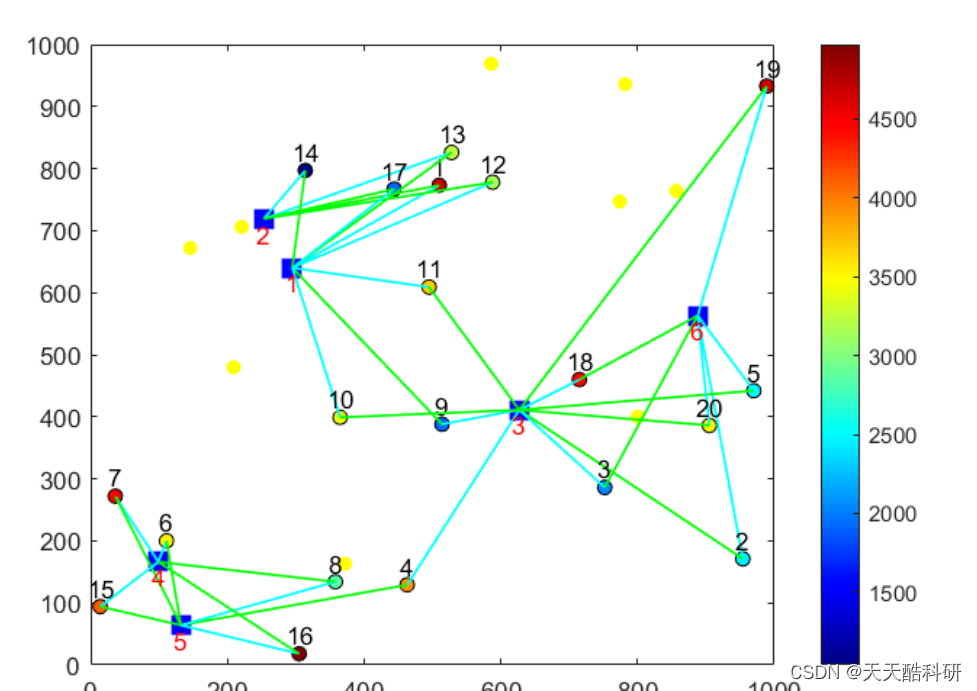
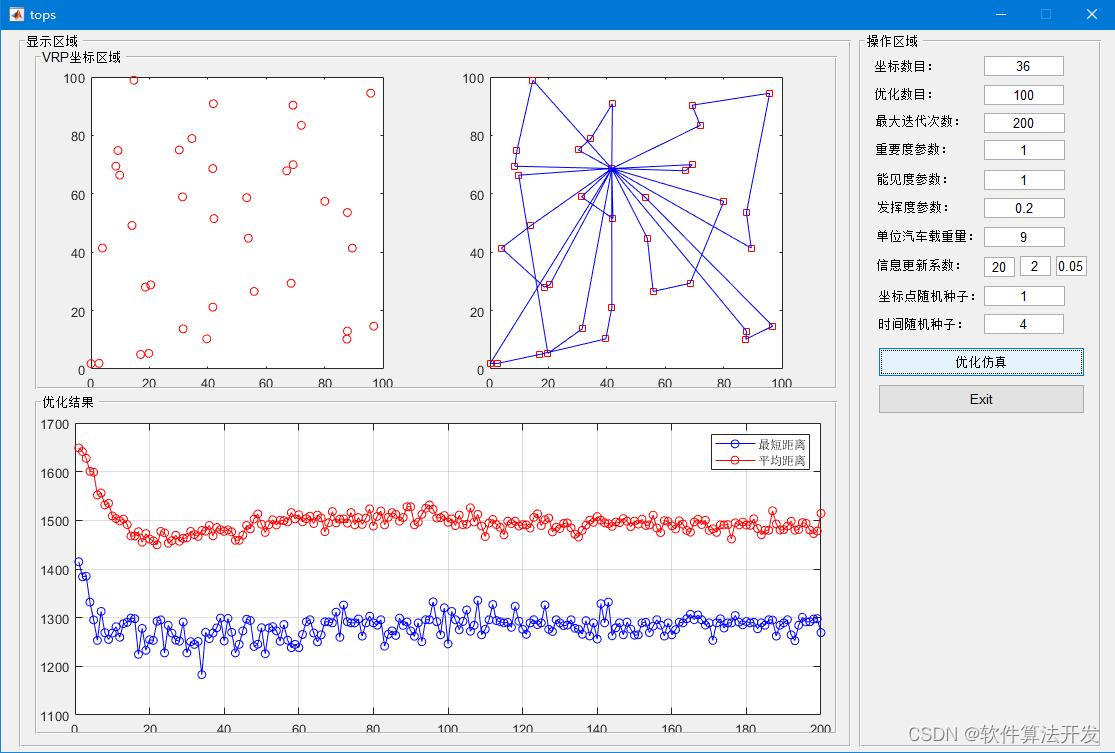
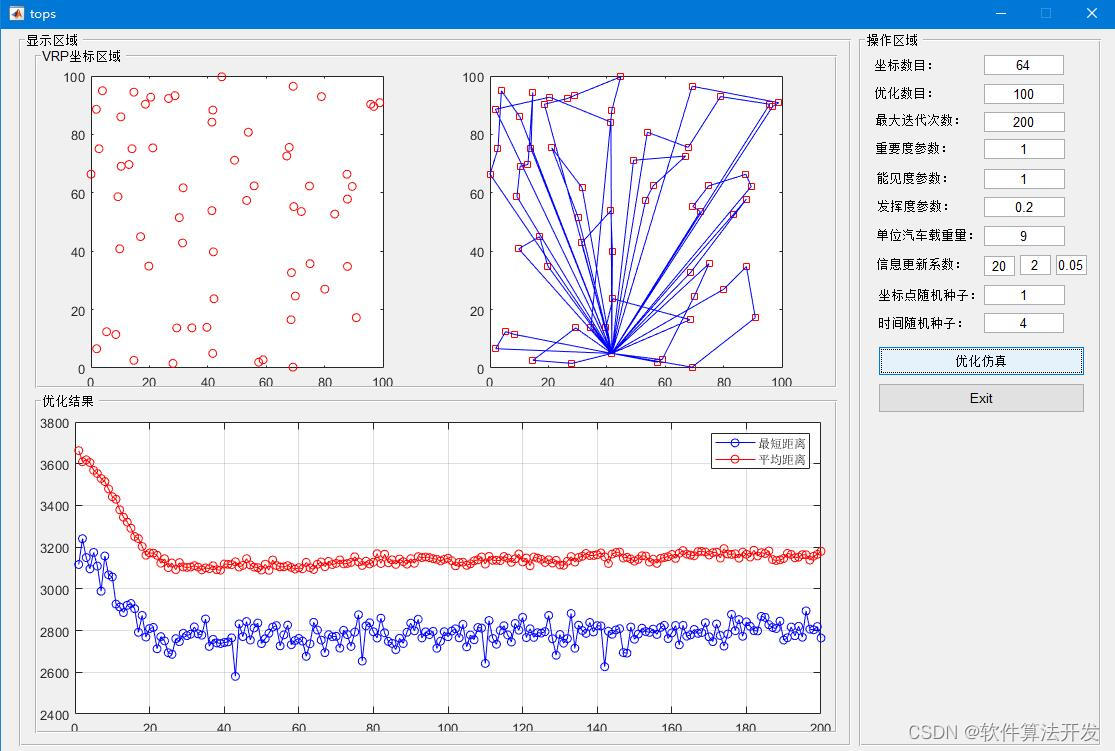
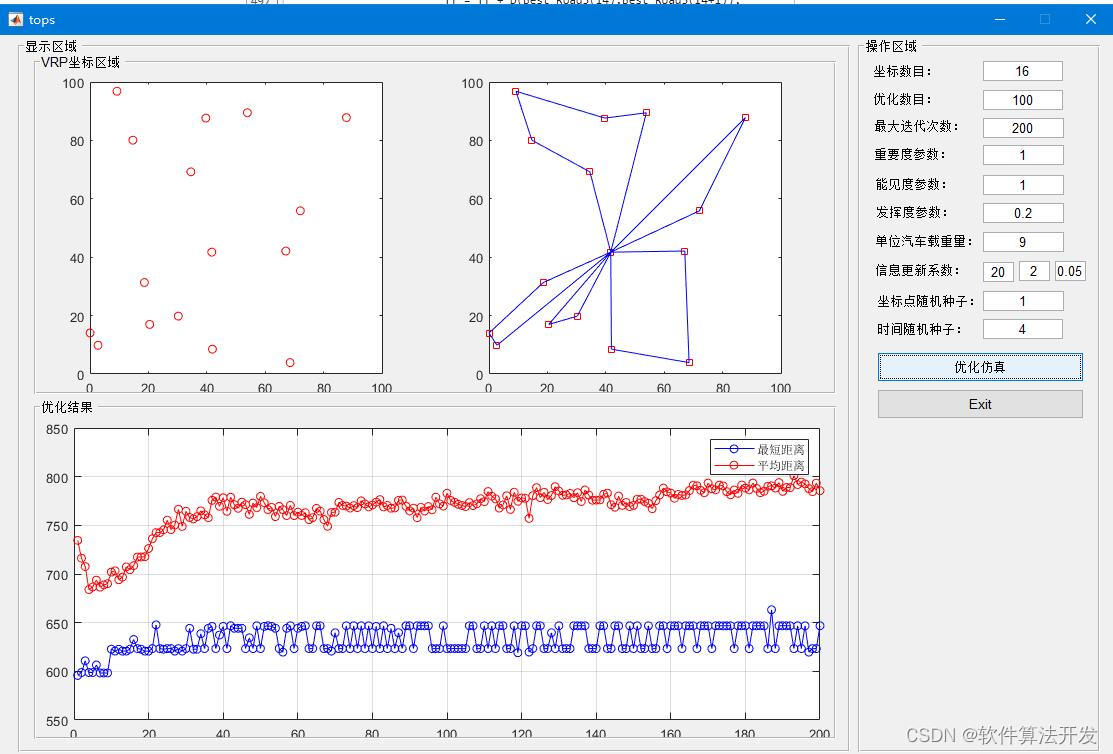
基于禁忌搜索算法的VRP问题求解matlab仿真,带GUI界面,可设置参数。
2.测试软件版本以及运行结果展示
MATLAB2022a版本运行
3.核心程序
.....................................................................................
while COUNT<=Itertions ֲ
L = zeros(Ant_Num,1);
for i=1:Ant_Num
Infor_Tabu_tmps = Infor_Tabu(i,:);
R = Infor_Tabu_tmps(Infor_Tabu_tmps>0);
for j=1:(length(R)-1)
L(i) = L(i) + D(R(j),R(j+1));
end
end
Best_Length(COUNT) = min(L);
pos = find(L==Best_Length(COUNT));
Best_Road(COUNT,1:length(Infor_Tabu(pos(1),:)))=Infor_Tabu(pos(1),:);
% Ž и
select = find(Best_Road(COUNT,:)==1);
FF = [];
FF2 = 0;
for I1 = 1:(length(select)-1)
Best_Road2 = Best_Road(COUNT,select(I1):select(I1+1));
Best_Road_len = length(Best_Road2);
T = zeros((length(select)-1),1);
for I4=1:(Best_Road_len-1)
T(I1) = T(I1) + D(Best_Road2(I4),Best_Road2(I4+1));
end
for I2 = 2:(Best_Road_len-1)
for I3=(I2+1):(Best_Road_len-1)
Best_Road3 = Best_Road2;
Best_Road31 = Best_Road3(I2);
Best_Road32 = Best_Road3(I3);
Best_Road3(I2) = Best_Road32;
Best_Road3(I3) = Best_Road31;
TT = zeros(1);
for I4=1:(Best_Road_len-1)
TT = TT + D(Best_Road3(I4),Best_Road3(I4+1));
end
if TT<T(I1)
T(I1) = TT;
Best_Road2 = Best_Road3;
end
end
end
if I1 >= 2
Best_Road2=Best_Road2(2:Best_Road_len);
end
FF = [FF,Best_Road2];
FF2 = FF2+T(I1);
end
Best_Length(COUNT) = FF2;
Best_Road(COUNT,1:length(FF)) = FF;
FF = [];
FF2 = 0;
Avg_Length(COUNT) = mean(L);
COUNT = COUNT+1;
% Ϣ
Delta_Infor = zeros(PNUM,PNUM);
for i=1:Ant_Num
Infor_Tabu_tmps = Infor_Tabu(i,:);
R = Infor_Tabu_tmps(Infor_Tabu_tmps>0);
for j=1:(length(R)-1)
Delta_Infor(R(j),R(j+1))=Delta_Infor(R(j),R(j+1))+Q/L(i);
end
end
Infor_cube = (1-Rho).*Infor_cube+Delta_Infor;
% ɱ
Infor_Tabu = zeros(Ant_Num,PNUM);
Carrier = 0;
end
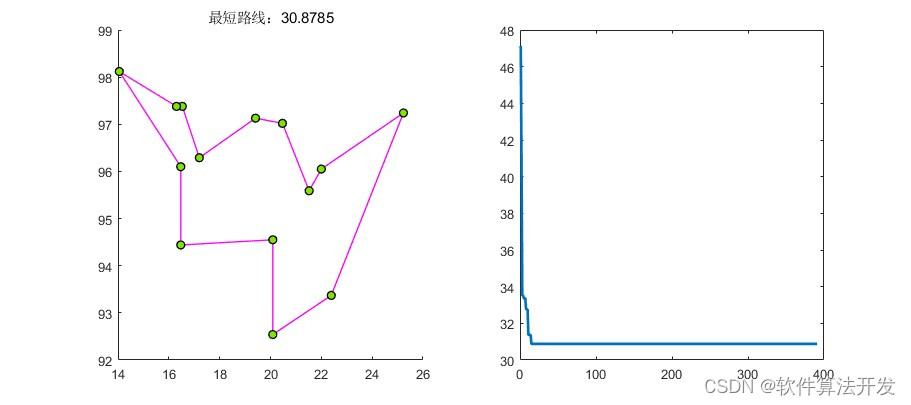
Pos = find(Best_Length==min(Best_Length));
best_route = Best_Road(Pos(1),:);
best_length = Best_Length(Pos(1));
best_route = best_route(best_route>0);
best_route
best_length
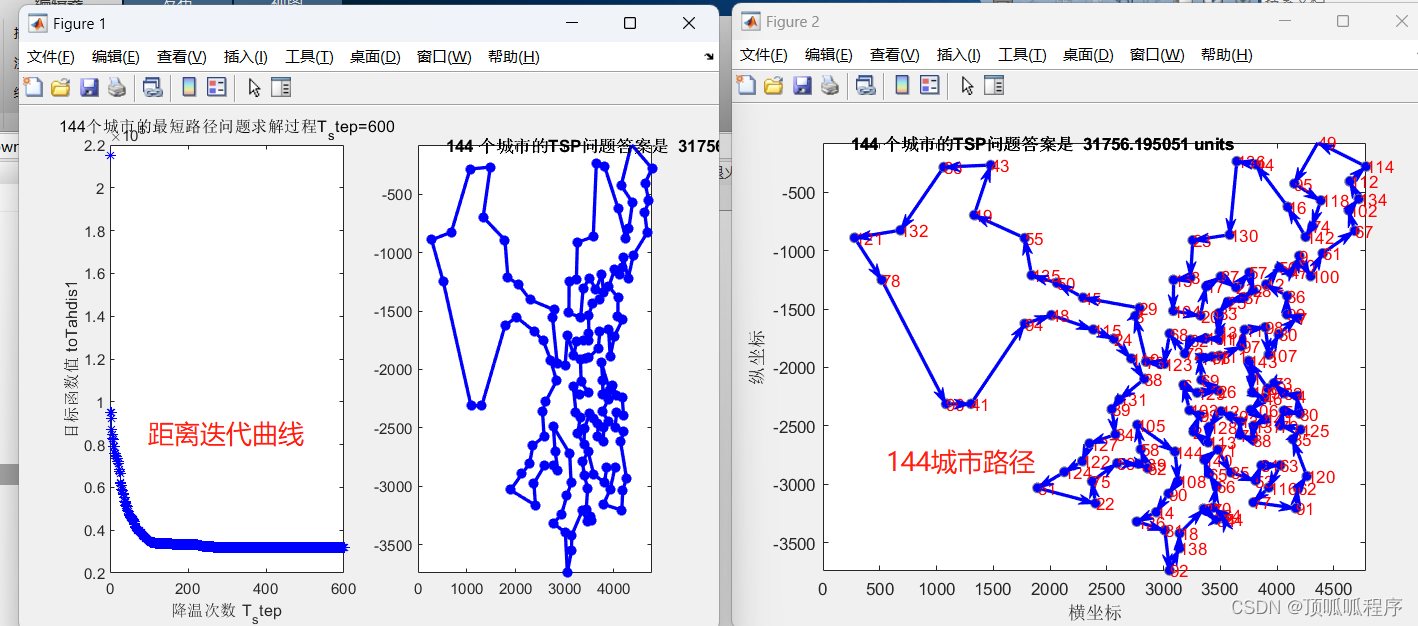
axes(handles.axes1);
plot([Position(best_route,1)],[Position(best_route,2)],'ro');
axis square;
axes(handles.axes2);
plot([Position(best_route,1)],[Position(best_route,2)],'rs');
hold on
plot([Position(best_route,1)],[Position(best_route,2)],'b-');
axis square;
axes(handles.axes3);
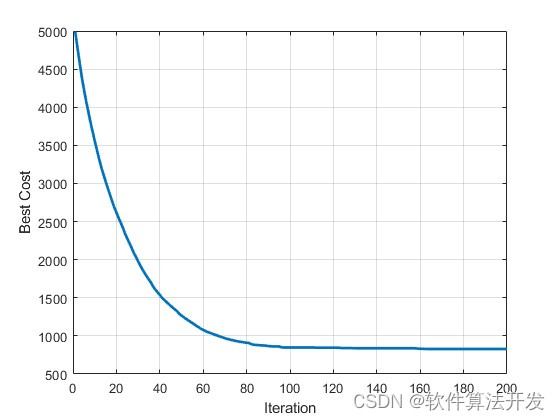
plot(Best_Length,'b-o');
hold on
plot(Avg_Length,'r-o');
grid on;
legend(' ̾ ','ƽ ');
% --- Executes on button press in pushbutton2.
function pushbutton2_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
clc;
clear;
close all;
06_012m4.本算法原理
4.1车辆路径问题(Vehicle Routing Problem, VRP)概述
车辆路径问题是一个典型的组合优化问题,其目标是在满足一系列约束条件下,为一组客户分配服务车辆,并确定每辆车的行驶路线,使得所有客户的配送需求得到满足的同时,总行驶距离或成本最小。数学表达式可以表示为:
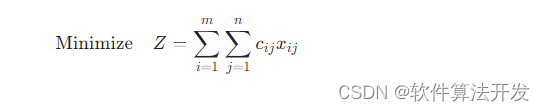
其中,
- m 是车辆数量;
- n 是客户节点的数量;
- cij 表示从客户节点 i 到客户节点 j 的行驶距离或成本;
- xij 是二进制变量,如果 xij=1,则表明在解决方案中,车辆从节点 i 直接行驶到节点 j。
同时需要满足以下约束条件:
- 每个客户节点仅被访问一次(除了起点和终点可能相同);
- 所有车辆必须返回出发点;
- 每辆车的最大载货量限制;
- 每辆车的最大行驶距离或时间限制等。
4.2 禁忌搜索算法(Tabu Search, TS)原理
禁忌搜索是一种启发式全局优化算法,通过不断迭代改进当前解,并利用记忆机制避免陷入局部最优解。对于VRP问题,TS的基本步骤如下:
- 初始化:生成一个初始解(即一个可行的车辆路线集合)。
- 定义邻域结构:定义如何改变当前解以生成新的候选解,通常包括交换、插入、删除、反转等操作。
- 设置禁忌列表(Tabu List):记录最近若干步内被改变过的元素及其变化方式,在一定步数内禁止再次进行同样的改变。
- 迭代过程:
- 生成当前解的一个或多个邻居解。
- 对每个邻居解进行评估,检查是否违反任何硬约束(如容量限制),若不违反,则计算其目标函数值。
- 若邻居解优于当前解且不在禁忌列表中,则接受该邻居解作为新的当前解,并将其变化信息加入禁忌列表。
- 更新最佳解记录,当发现更好的解时保存。
- 继续迭代直到达到预设的终止条件(如迭代次数、改进幅度阈值等)。
5.完整程序
VVV