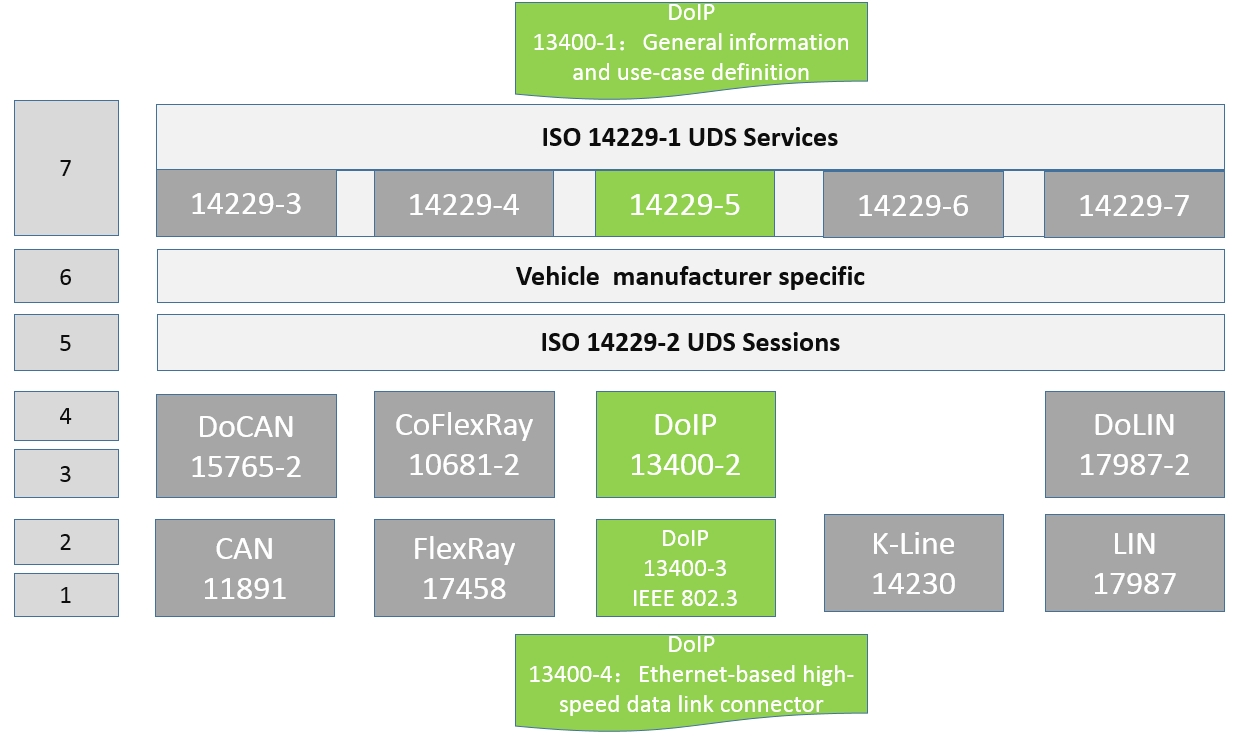
UDS
- 主要功能:读取故障,数据传输,上传下载,复位等
诊断请求
第一字节
为了解决数据过长,即分包的问题,15765-2总共定义了4种类型的帧结构

表示四种帧的类型主要靠byte1的高四位,单帧为0,首帧为1,连续为2,流控为3

- 在单帧的情况下(即),SF_DL代表后面有几个字节数据,如果有没有使用的字节,通常要用0x55或0xAA来填充。

- 分包情况的工作流程,如下图所示

首先,发送端通过FF(FirstFrame)启动通信,其中前两个字节的高位4bit标识为0001代表FF,低4bit与第二个字节共同表示总数据长度。接着,接收端回应FC(FlowControl),首字节高4bit为0011,低4bit的FlowStatus和第二个字节的BlockSize、第三个字节的SeperateTime共同指示接收速率。FlowStatus存在三种状态:CTS(0)、WT(1)、OVFLW(2)。
- FlowStatus的状态:FlowStatus为0时,允许发送ConsecutiveFrame;为1时要求暂停发送,恢复时再发FlowStatus=0通知;若因资源限制无法接收数据,则发送FlowStatus=2的FlowControl。

Stmin的状态:由控制图可知,Stmin的大小控制的是上一帧CF结束到开始下一帧CF中间的最小时间间隔

BS的状态:BS的大小是CF帧在没有流控帧的情况下能发多少帧,例如BS为5,那么CF能够发五帧,然后就要看新的流控帧如何调配。

分段传输的诊断服务举例:
这是一个读取DTC的命令和应答。
03 19 02 08 55 55 55 55 (诊断仪发送的SingleFrame的request)
10 33 59 02 19 01 00 07 (ECU以FirstFrame开始传输的response)
30 00 00 55 55 55 55 55 (诊断仪发送的FC)
21 09 03 05 02 09 05 04 (ECU发送的CF)
22 07 09 05 06 06 09 05 (ECU发送的CF)
23 08 03 08 07 01 05 08 (ECU发送的CF)
24 07 01 06 08 07 01 0C (ECU发送的CF)
25 08 07 01 0D 08 07 03 (ECU发送的CF)
26 07 09 08 01 01 09 09 (ECU发送的CF)
27 01 07 09 AA AA AA AA (ECU发送的CF,此时传输结束)
BS和STmin等于0时,表示接收端可以以最快的速度来接收数据,发送端可以一次发送的CF数量不受限制。
其余字节
UDS报文
有子功能
1byte:Service ID(SID),服务标识符,相当于CCP的CMD,代表了这条诊断命令执行的什么功能。
1byte:Sub-function,当前服务标识符具体的操作,代表当前诊断服务的具体操作
- 其中Sub-function的8个bit,最高位的1bit用于抑制正响应。当最高位为1时,不会给出正响应;为0,给出正响应。
xbyte:Parameter,当前功能下的发送参数
例如:31 01 08 09为开启软件刷写检查,31 02 08 09为关闭
- 31为服务标识符,01为子功能ID,08 09为具体参数
没有子功能
1byte:Service ID,服务标识符
xbyte:Parameter,当前功能下的发送参数
通用介绍
- 正响应的意思是执行成功后,服务端返回报文报告执行成功
- 负响应的意思是执行失败后,服务端返回报文报告执行失败
负响应返回的报文:最高字节固定为7F,第二字节为被拒绝的SID,后续字节为被拒绝的原因
发送报文:27 05
回复:7F 27 13
正响应返回的报文:最高字节为SID基础上加上0x40,次高字节为子功能ID,后续表示发送的数据
发送报文:27 05
回复:67 05 01 01 01
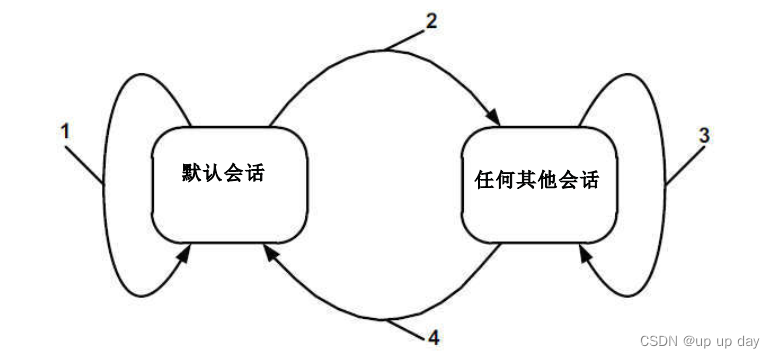
诊断会话包含三个子功能:01 Default默认会话,02 Programming编程会话,03 Extended扩展会话,
ECU上电后,一般处于默认状态
编程会话:可以进行软件刷写等一系列操作
扩展会话:大部分诊断数据读写
如图为UDS诊断协议图片,进入01会话成功,进入02会话失败,进入03会话成功

常见的SID诊断服务
10服务:诊断会话,10 01默认会话;10 02编程会话;10 03扩展会话;
11服务:该服务请求ECU根据复位的内容有效地执行ECU复位,11 01硬件复位;11 03软件复位
14服务:使用此服务来清楚ECU内存中的故障内存的诊断行行行;常见的请求命令为14FFFFFF
19服务:此服务读取ECU驻留诊断故障代码(DTC)信息的状态;常见用法是19 02 09读取当前和历史故障
22服务:该服务允许通过DID向ECU请求读取数据值;读取功能配置22 F1 01;网络配置22 F1 10等
27服务:该服务在向ECU请求写入数据时需要进行的解锁服务;请求种子2701;发送钥匙2702
28服务:用于“打开/关闭”ECU的某些消息的传输和/或接收,以及消息的通讯类型,常见的有28 01 只收不发
2E服务:该服务 允许通过DID在解锁条件下向ECU请求写入数据值;常见的为写入车辆的网络配2E F1 10 xx
2F服务:使用此服务来替换输入信号、内部ECU功能和\或控制由服务器的数据接口引用的电子系统的输出(执行器)
31服务:客户端使用此服务来启动/停止例程,并在服务器的内存中请求例程结果。通常刷写过程中会用到。