ardupilot开发 --- 机载(边缘)计算机-VISP 篇
- 开发
- 19
-
1. 一些概念
- 什么是VISP
VISP即Visual servoing platform.
Allows to control a robot equipped with a camera from measures extracted from the images.
- 实现无人机飞行控制,机器人运动控制。
- 实现实时目标检测。
- 实现实时位姿估计。
- 特点
- 集成其他算法很便捷
- 跨平台,源码为C++
- 完备的使用文档、帮助文档
- 模块化的软件架构
下图突出显示了模块依赖项和每个模块可能使用的第三方库。中央模块是核心模块core。所有其他模块都依赖于core。
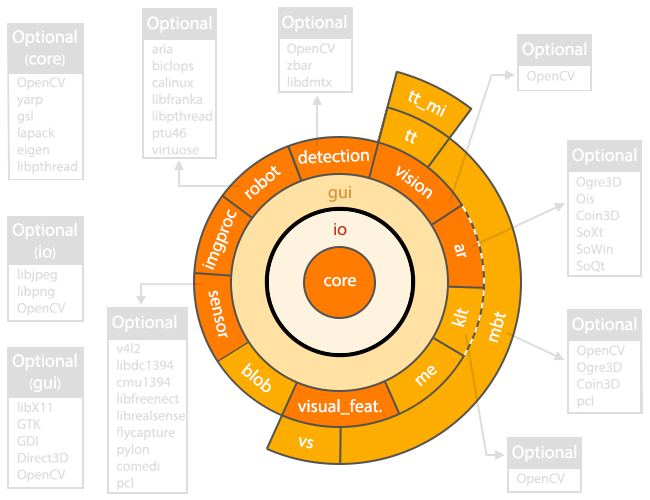
- 模块 概述
- core
定义基本数据结构(图像、矩阵、相机)的模块。此模块由所有其他模块使用。为了启用某些功能,此模块可能会使用可选的第三方库。
- io
管理图像或视频的 I/O、命令行解析。
- gui
在屏幕窗口上显示图像,实时绘制变量的演变过程。
- ar
ar 即 augmented reality ,增强现实。
- detection
条形码和人脸检测。
目标检测。
- robot
真实机器人或仿真机器人接口。
真实:Afma4, Afma6, Viper, Pioneer, Panda from Franka Emika
仿真:free flying camera, Afma6, Viper, Pioneer
- imgproc
提供图像处理算法。
- sensor
提供摄像头、RGB-D传感器、激光传感器接口。
如:usb相机,Kinect相机,Sick雷达。
需要调用第三方库。
- vision
相机标定、图像特征点检测、特征点匹配、位姿估计等。
基本通过调用opencv实现。
- visual_feat
定义视觉特征,用于视觉伺服。
原文地址:https://blog.csdn.net/weixin_43321489/article/details/136810987
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。
本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:https://www.suanlizi.com/kf/1770062168440573952.html
如若内容造成侵权/违法违规/事实不符,请联系《酸梨子》网邮箱:1419361763@qq.com进行投诉反馈,一经查实,立即删除!