///
作者:电子机械工人
链接:https://www.zhihu.com/question/383770864/answer/1116546448
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
伺服驱动器的电流环、速度环、位置环频率一般是多少?
看到两家驱动器都是电流环16kHz,位置环4kHz,位置环1kHz。有什么讲究吗?
这个3环频率理论上是越高越好,更高的频率意味着更高的带宽,更高的性能。但是频率的提高受限于很多方面。比如dsp的运算速度,开关管的开关频率限制。一般老一代的伺服电流环是16k,由于速度环是电流环的外环,速度环减半或者1/4,位置环再减半或者再1/4。高端点的伺服的电流环是32k的刷新率,相应的速度环和位置环的刷新率也更高。随着现在硬件性能的提升,计算速度已经越来越快,32k甚至更高的刷新率都已经有被用到。
首先内环的控制频率一般是要大于外环的控制频率的;其次伺服产品的话据我了解的话还是挺多种组合的,除了题主说的16:4:1,还有内环到外环2:1:1,甚至1:1:1,等等排列组合,外环控制频率越高,理论上离散化带来的延时会越小,外环极限带宽能够做到更高,进一步最外环的带宽能够更高。但实际上可能受到控制芯片运算能力的限制,外环控制频率无法做得很高,另一方面也受到内环带宽的限制,外环控制频率没必要很高,所以外环到内环的控制频率配置各有不同。顺便在这插个眼,等待大佬的纠正补充~
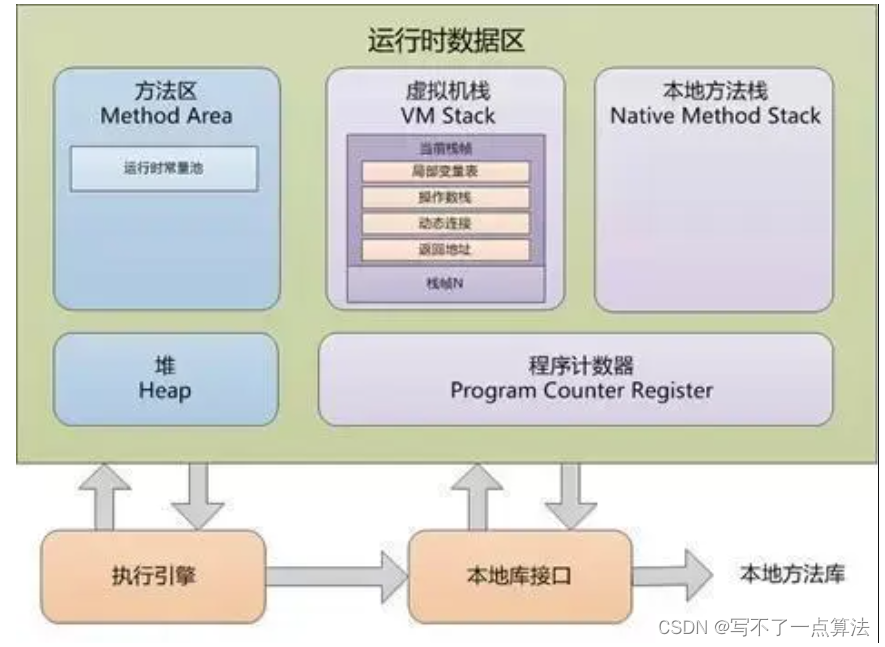
伺服电机一般为三个环控制,分别是电流环、速度环、位置环,如下图所示

频率不一样是由他们所在的控制环的位置决定的,位置越靠内,采样频率自然需要越高。
根据香农采样定理,采样频率至少是目标频率的2倍,越高越好,当然越高对硬件和实时性的要求更高。
另外这三个环是包含关系。最小环是电流环,其次是速度环,最大是位置环。如果要用速度环,那你必须要有电流环。如果要用位置环,那么三个环都得用。
根据上面的关系,位置环频率决定了速度环频率,速度环频率决定了电流环频率。
那什么决定了位置环频率呢?
位置环频率系统设计决定的。如果是数控系统,那么是由运动速度,运动精度决定的。