目录
Pose-to-Motion: Cross-Domain Motion Retargeting with Pose Prior
maya导入bvh
GitHub - jhoolmans/mayaImporterBVH: Importer script for BVH
maya python脚本测试
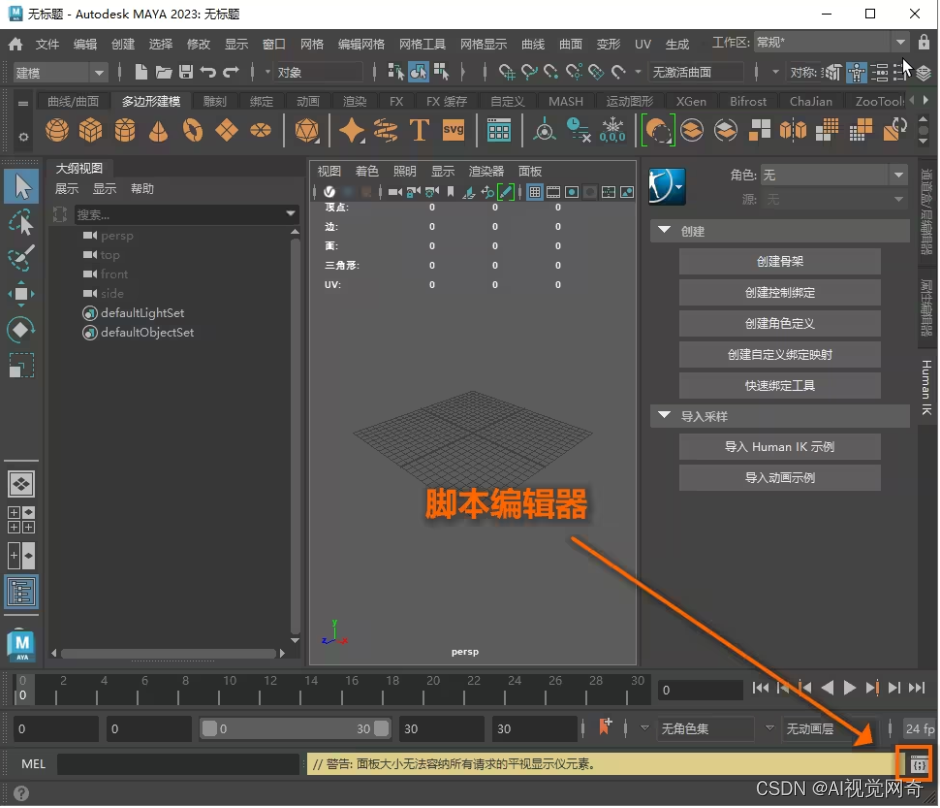
首先打开MAYA,然后点击软件上方,菜单栏上的窗口->常规编辑器->脚本编辑器。
在弹出的脚本编辑器的下方,选择python选项卡,然后把下面的案例代码复制粘贴进去。
测试脚本:
import maya.OpenMaya as om
import maya.cmds as cmds
import random, time
def arPolyNoise(geoObject, maxDisplacement):
"""Apply noise to the supplied geometry object using the supplied max displacement."""
# get the dag path for the shapeNode using an API selection list
selection = om.MSelectionList()
dagPath = om.MDagPath()
try:
selection.add(geoObject)
selection.getDagPath(0, dagPath)
except: raise
# apply noise to the shape's points
try:
# initialize a geometry iterator
geoIter = om.MItGeometry(dagPath)
# get the positions of all the vertices in world space
pArray = om.MPointArray()
geoIter.allPositions(pArray)
# displace each of the vertices
for i in xrange(pArray.length()):
displacement = om.MVector.one * random.random() * maxDisplacement
pArray[i].x += displacement.x
pArray[i].y += displacement.y
pArray[i].z += displacement.z
# update the surface of the geometry with the changes
geoIter.setAllPositions(pArray)
meshFn = om.MFnMesh(dagPath)
meshFn.updateSurface()
except: raise
# start the timer and add the noise
timeStart = time.clock()
# create a sphere and add noise
sphere = cmds.polySphere(radius=1, subdivisionsX=200, subdivisionsY=200)
arPolyNoise(sphere[0], 0.02)
# stop the timer
timeStop = time.clock()
print('Execution time: %s seconds.'%(timeStop-timeStart))maya python脚本调用
使用Python在外部运行Maya-standalone库_maya.standalone-CSDN博客
maya重定向
maya导入bvh需要用插件,效果还没测
两个bvh必须 是T-Pose
是把source的动作拷贝给target
target只要t-pose就行。
关节映射。