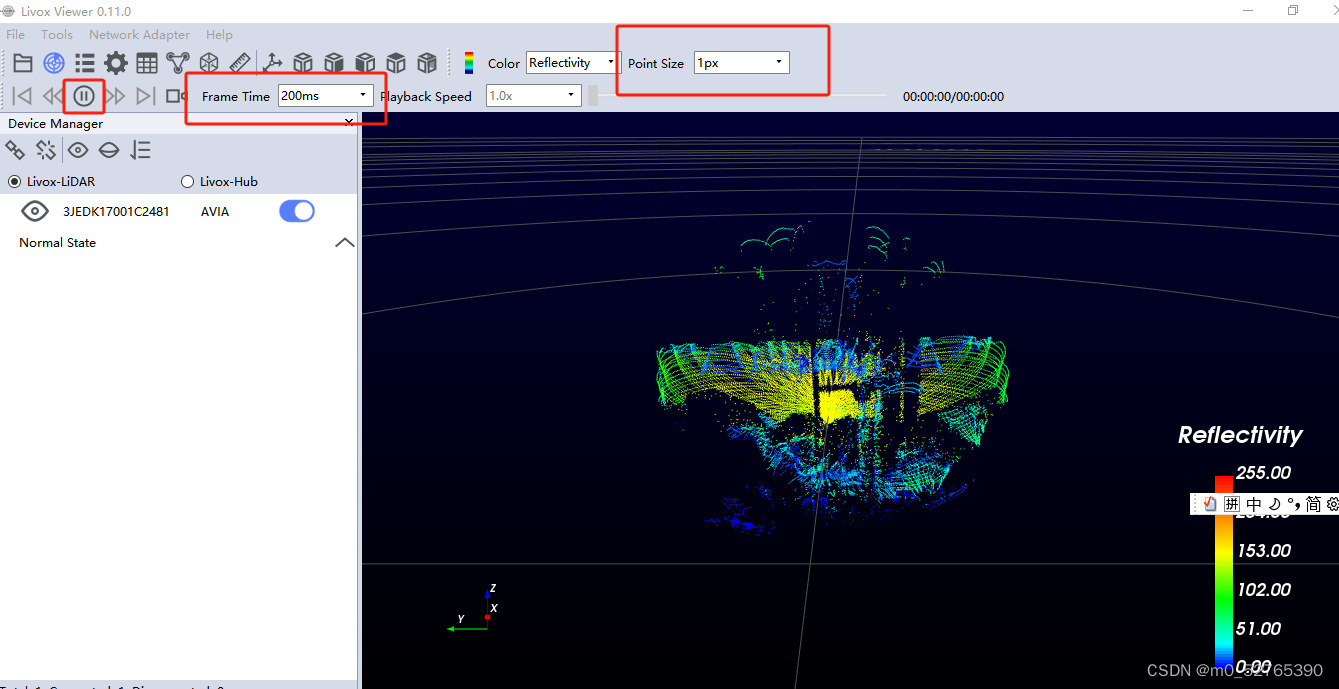
若拿到手的Livox Avia激光雷达不知道它的ip信息,可以在官网上LiDAR Sensors - Livox下载上位机软件Livox Viewer,查看IP,下载window版本就可以。雷达通过网线连上电脑后,该软件就可以自动识别出来。按照下图步骤,就可以看到激光雷达的现在ip了。为了实现和激光雷达的通信,与它通信的设备的ip 应该改为同一网段。(可以ping来验证)

在这个软件下的激光雷达的效果图:
一、前期准备
1.1创建工作空间
1.2 安装Livox-SDK
在工作空间的src目录下:
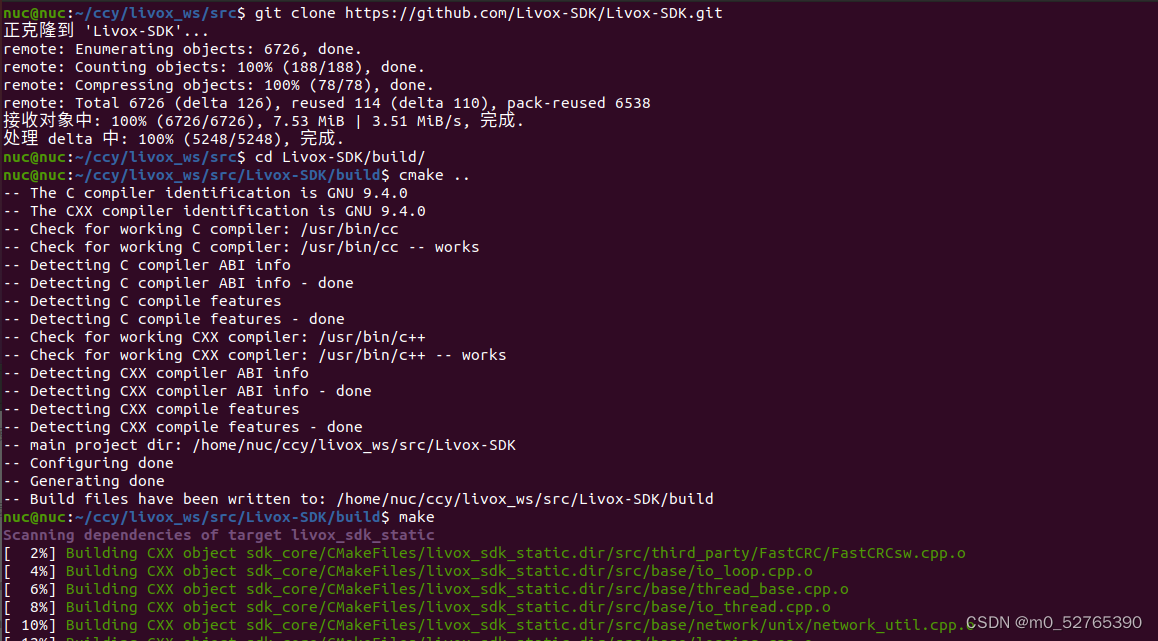
(1)clone Livox-SDK源码
git clone https://github.com/Livox-SDK/Livox-SDK.git(2) 依次运行以下命令
cd Livox-SDK/build/
cmake
make
sudo make install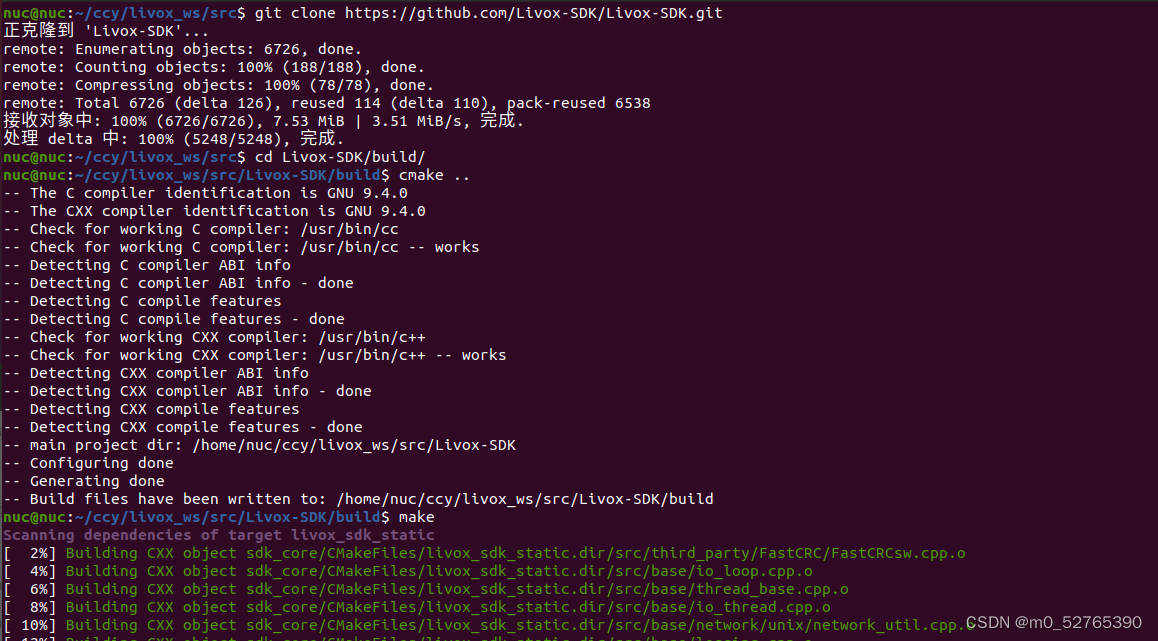

(3)验证安装SDK有无问题
在build目录下:
cd sample/lidar && ./lidar_sample 输出下面语句,证明sdk安装无误。
输出下面语句,证明sdk安装无误。
1.3 安装livox_ros_driver
(1)在工作空间的src目录下,依次运行:
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
cd ws_livox
catkin_make
source ./devel/setup.sh
 (2)运行览沃 ROS 驱动程序
(2)运行览沃 ROS 驱动程序

上图中的.launch文件都可以运行。以ivox_ros_driver livox_lidar_rviz.launch为例。
roslaunch livox_ros_driver livox_lidar_rviz.launch