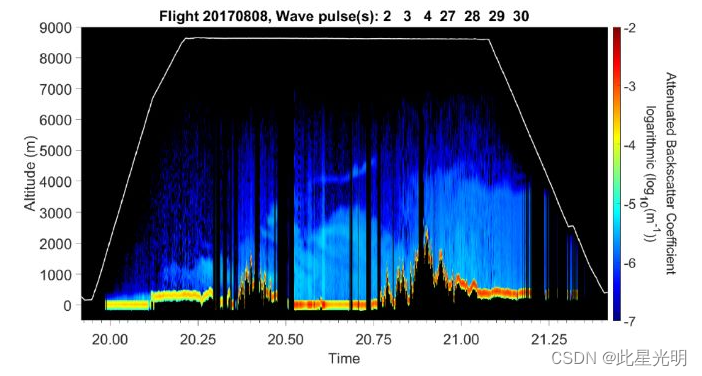
来自二氧化碳探测仪的大气后向散射系数剖面图,2017年
本数据集提供了2017-07-20至2017-08-08期间在美国阿拉斯加以及加拿大育空地区和西北地区上空进行的二氧化碳夜间、白天和季节排放主动传感(ASCENDS)部署期间收集的大气后向散射系数剖面图。这些剖面由一架 DC-8 飞机上搭载的二氧化碳探测仪激光雷达仪器测量。机载二氧化碳探测仪是一种脉冲式多波长集成路径差分吸收激光雷达,可估算从飞机到散射表面的天底路径上的柱均干空气二氧化碳混合比(XCO2)。除 XCO2 外,激光雷达接收器还记录了激光脉冲在大气中传播时的时间分辨大气反向散射信号强度。激光雷达原始数据被转换为大气后向散射截面积和双向大气传输,也称为衰减后向散射剖面。这些 ASCENDS 飞行与 2017 年北极-北方脆弱性实验(ABoVE)活动协调进行,并以 ICARTT 格式提供。Mapmost login
本数据集提供了2017-07-20至2017-08-08期间在美国阿拉斯加以及加拿大育空地区和西北地区上空进行的二氧化碳夜间、白天和季节排放主动传感(ASCENDS)部署期间收集的大气后向散射系数剖面图。这些剖面由一架 DC-8 飞机上搭载的二氧化碳探测仪激光雷达仪器测量。机载二氧化碳探测仪是一种脉冲式多波长集成路径差分吸收激光雷达,可估算从飞机到散射表面的天底路径上的柱均干空气二氧化碳混合比(XCO2)。除 XCO2 外,激光雷达接收器还记录了激光脉冲在大气中传播时的时间分辨大气反向散射信号强度。激光雷达原始数据被转换为大气后向散射截面积和双向大气传输,也称为衰减后向散射剖面。这些 ASCENDS 飞行与 2017 年北极-北方脆弱性实验(ABoVE)活动协调进行,并以 ICARTT 格式提供。
本数据集中包含 16 个 ICARTT 格式(*.ict)的数据文件。此外还包括 Matlab 脚本,用于对 2017 年 ABoVE 机载活动期间二氧化碳激光探测仪测量的大气后向散射剖面进行数据处理。
北极-北方脆弱性实验(ABoVE)是美国国家航空航天局(NASA)陆地生态计划的一项实地活动,于2016年至2021年期间在阿拉斯加和加拿大西部进行。ABoVE 的研究将基于实地的过程级研究与机载和卫星传感器获得的地理空间数据产品联系起来,为提高分析和建模能力奠定了基础,而分析和建模能力是了解和预测生态系统反应及社会影响所必需的。
Platforms
NASA DC-8
Instruments
BACKSCATTER LIDAR
Data Formats
Distribution: ICARTT
Temporal Extent
2017-07-20 to 2017-08-08
Data Centers
ORNL_DAAC
Spatial Extent
Bounding Box: (71.27°, -98.15°), (34.59°, -165.68°)
数据属性
| Variable | Units | Description |
|---|---|---|
| Start_UTC | s | Seconds since midnight UTC on flight date |
| Day_Of_Year | d | Day of year, beginning January 1 |
| Latitude | degrees | Latitude |
| Longitude | degrees | Longitude |
| MSL_GPS_Altitude | m | Sensor height above mean sea level |
| HAE_GPS_Altitude | m | Sensor height above WGS84 ellipsoid |
| Pressure_Altitude | ft | Aircraft altitude from air pressure sensor |
| Radar_Altitude | ft | Aircraft altitude from radar |
| Ground_Speed | m s-1 | Aircraft ground speed |
| True_Air_Speed | kts | Air speed in knots |
| Indicated_Air_Speed | kts | Air speed in knots |
| Mach_Number | mach | Air speed in mach number |
| Vertical_Speed | m s-1 | Vertical speed |
| True_Heading | degrees | Aircraft heading, 0-360 degrees, clockwise from +y |
| Track_Angle | degrees | Aircraft track, 0-360 degrees, clockwise from +y |
| Drift_Angle | degrees | Aircraft drift, +/-180 degrees, clockwise from +y |
| Pitch_Angle | degrees | Aircraft pitch, +/-180 degrees, up+ |
| Roll_Angle | degrees | Aircraft roll, +/-180 degrees, right+ |
| Static_Air_Temp | degrees Celsius | Air temperature |
| Potential_Temp | degrees Kelvin | Air temperature |
| Dew_Point | degrees Celsius | Dew point temperature |
| Total_Air_Temp | degrees Celsius | Air temperature |
| IR_Surf_Temp | degrees Celsius | Surface temperature |
| Static_Pressure | mb | Air pressure |
| Cabin_Pressure | mb | Air pressure |
| Wind_Speed | m s-1 | Wind speed, limited to where Roll_Angle <= 5 degrees |
| Wind_Direction | degrees | Wind direction, 0-360 degrees, clockwise from +y |
| Solar_Zenith_Angle | degrees | Solar zenith angle |
| Aircraft_Sun_Elevation | degrees | Aircraft sun elevation angle |
| Sun_Azimuth | degrees | Sun azimuth angle |
| Aircraft_Sun_Azimuth | degrees | Aircraft-sun azimuth angle |
| Mixing_Ratio | g kg-1 | Atmospheric mixing ratio |
| Part_Press_Water_Vapor | mb | Partial pressure of water vapor |
| Sat_Vapor_Press_H2O | mb | Saturated vapor pressure over liquid water |
| Sat_Vapor_Press_Ice | mb | Saturated vapor pressure over ice |
| Relative_Humidity | percent | Relative humidity |
代码:
!pip install leafmap
!pip install pandas
!pip install folium
!pip install matplotlib
!pip install mapclassify
import pandas as pd
import leafmap
url = "https://github.com/opengeos/NASA-Earth-Data/raw/main/nasa_earth_data.tsv"
df = pd.read_csv(url, sep="\t")
df
leafmap.nasa_data_login()
results, gdf = leafmap.nasa_data_search(
short_name="ABoVE_ASCENDS_Backscatter_2051
",
cloud_hosted=True,
bounding_box=(-165.68, 34.59, -98.15, 71.27),
temporal=("2017-07-20", "2017-08-08"),
count=-1, # use -1 to return all datasets
return_gdf=True,
)
gdf.explore()
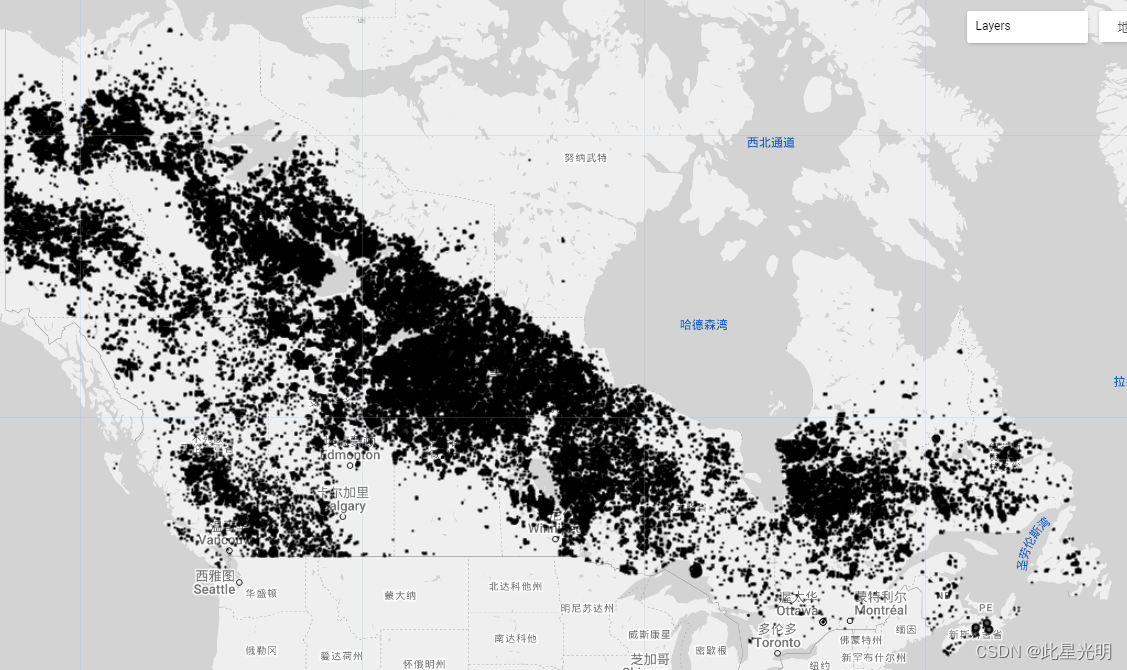
#leafmap.nasa_data_download(results[:5], out_dir="data")下图显示监测的地面轨迹的地图,以及概述每次飞行的表格。表格中的颜色与地面轨迹中显示的颜色一致。