ESP32-S3 IDF USART详解
USART简介
USART是一种串行通信协议,广泛应用于微控制器和计算机之间的通信。USART支持异步和同步模式,因此它可以在没有时钟信号的情况下(异步模式)或有时钟信号的情况下(同步模式)进行通信。
ESP32-S3的USART
ESP32-S3有两个全功能的USART通道,USART0和USART1,USART2,支持异步通信(RS232 和 RS485)和 IrDA,通信速率可达到 5 Mbps。
UART 基本架构图
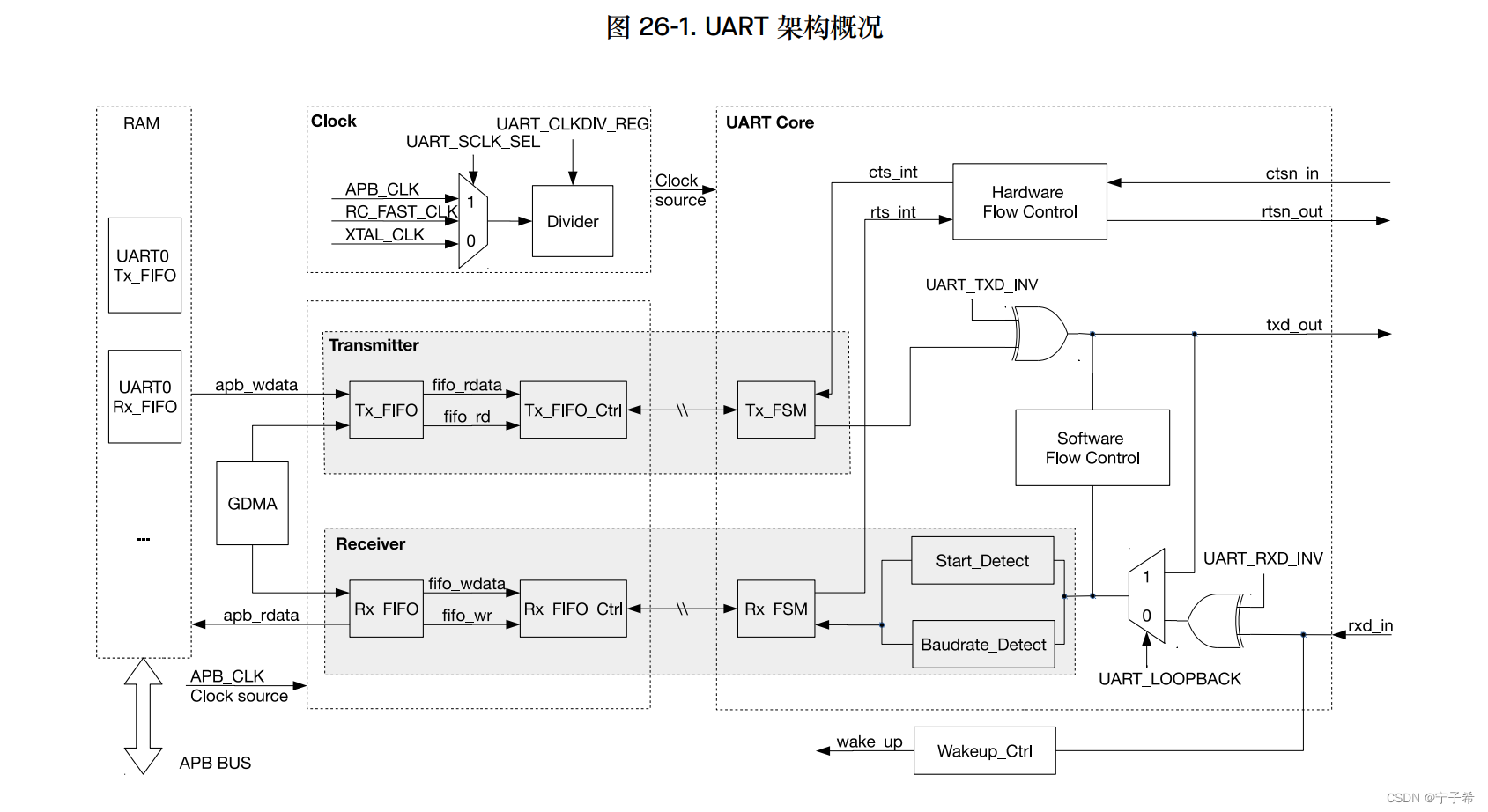
UART 模块工作在两个时钟域:APB_CLK 时钟域和 Core 时钟域。UART Core 有三个时钟源:80-MHz APB_CLK、RC_FAST_CLK 以及晶振时钟 XTAL_CLK ,可以通过配置 UART_SCLK_SEL 来选择时钟源。分频器用于对时钟源进行分频,然后产生时钟信号来驱动 UARTCore 模块。
更加详细的介绍,可以去看看官方的文档:
ESP32S3官方文档
需要注意一点
ESP32-S3的USART引脚映射是可配置的,这是因为ESP32-S3使用了一个称为GPIO矩阵的特性。GPIO矩阵是ESP32-S3硬件的一部分,它允许将内部信号路由到任何GPIO引脚。这意味着,我们可以将USART的发送(TX)和接收(RX)信号连接到你选择的任何可用GPIO引脚。
ESP32-S3 UART的默认引脚
| 发送(TX) | 接收(RX) | |
|---|---|---|
| UART0 | IO43 | IO44 |
| UART1 | IO17 / 任意IO | IO18 / 任意IO |
| UART2 | 任意IO | 任意IO |
printf()函数
在ESP-IDF中,printf()函数默认使用的是USART0。这是因为在ESP32-S3的启动代码中,USART0被初始化为默认的调试控制台。因此,当我们在代码中使用printf()函数来打印信息时,这些信息将会被发送到USART0,并且可以通过串行接口(如USB转串口适配器)在计算机的串行监视器上看到。
使用ESP-IDF配置USART
在ESP32-S3上使用USART的基本步骤:
- 设置 UART 参数、分配引脚(可选,不配置则使用默认引脚)
- 初始化UART
- 安装 UART 驱动
- 收发数据
- 使用中断
- 卸载 UART 中断驱动,释放资源(当 UART 不再使用时)
#include "driver/uart.h"
void app_main(void)
{
// -------------1. 配置USART选项-----------------------
uart_config_t uart_config = {
.baud_rate = 115200, // 波特率
.data_bits = UART_DATA_8_BITS, // 数据位
.parity = UART_PARITY_DISABLE, // 奇偶校验
.stop_bits = UART_STOP_BITS_1, // 停止位
.flow_ctrl = UART_HW_FLOWCTRL_DISABLE // 流控
};
// --------------2. 初始化USART------------------------
// UART_NUM_1:UART端口号
// &uart_config:指向uart_config_t结构体的指针
uart_param_config(UART_NUM_1, &uart_config);
// --------------3. 安装驱动程序------------------------
// UART_NUM_1:UART端口号
// 1024 * 2:接收缓冲区大小
// 0:发送缓冲区大小
// 0:队列长度
// NULL:队列句柄(如果不使用队列,可以设置为NULL)
// 0:中断分配标志(通常设置为0)
uart_driver_install(UART_NUM_1, 1024 * 2, 0, 0, NULL, 0);
// 4.---------------4. 发送数据--------------------------
// UART_NUM_1:UART端口号
// "Hello, world!":要发送的数据
// 13:要发送的数据的长度
uart_write_bytes(UART_NUM_1, "Hello, world!", 13);
// ------------------5. 读取数据-----------------------
uint8_t data[128]; // 数据缓冲区
int length = 0; // 读取的数据长度
// UART_NUM_1:UART端口号
// data:数据缓冲区
// sizeof(data):要读取的最大数据长度
// 1000 / portTICK_RATE_MS:读取超时时间(以RTOS tick为单位)
length = uart_read_bytes(UART_NUM_1, data, sizeof(data), 1000 / portTICK_RATE_MS);
if (length > 0) {
// 如果读取到数据,处理数据
// ...
}
}
前面提到过ESP32-S3的USART引脚映射是可配置的,所以我们可以使用uart_set_pin()来自定义TX和RX
#include "driver/uart.h"
void app_main(void)
{
// 设置UART1的TX引脚为GPIO10,RX引脚为GPIO9
uart_set_pin(UART_NUM_1, 10, 9, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE);
}
这里uart_set_pin()函数的最后两个参数是RTS(请求发送)和CTS(清除发送),我没有使用所以将它们设置为UART_PIN_NO_CHANGE
USART实验

串口UART_NUM_1接收数据,并分别在串口UART_NUM_0和串口UART_NUM_1返回
这次我们依旧使用面向对象的方法来编写驱动,驱动API接口参考Arduino的格式
USART.h
/**
* @file USART.h
* @author 宁子希 (1589326497@qq.com)
* @brief 串口初始化类
* @version 0.1
* @date 2024-03-12
*
* @copyright Copyright (c) 2024
*
*/
#ifndef _USART_H_
#define _USART_H_
#include <string.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "driver/uart.h"
#include "driver/uart_select.h"
#include "driver/gpio.h"
#ifdef __cplusplus
extern "C" {
#endif
class Uart {
public:
// 构造函数,接收UART端口号和TX、RX引脚作为参数
Uart(uart_port_t uart_num, int tx_pin, int rx_pin);
// 发送数据,接收一个字符数组和长度作为参数
void write(const char* data, int len);
// 接收数据,接收一个字符数组和长度作为参数,返回实际接收的长度
int read(uint8_t* buf, int len);
private:
uart_port_t _uart_num; // UART端口号
int _tx_pin; // TX引脚
int _rx_pin; // RX引脚
};
#ifdef __cplusplus
}
#endif
#endif
USART.cpp
/**
* @file USART.cpp
* @author 宁子希 (1589326497@qq.com)
* @brief 串口初始化类
* @version 0.1
* @date 2024-03-12
*
* @copyright Copyright (c) 2024
*
*/
#include "USART.h"
// 构造函数
Uart::Uart(uart_port_t uart_num, int tx_pin, int rx_pin)
: _uart_num(uart_num), _tx_pin(tx_pin), _rx_pin(rx_pin) {
// 配置UART参数
uart_config_t uart_config = {
.baud_rate = 115200, // 波特率
.data_bits = UART_DATA_8_BITS, // 数据位
.parity = UART_PARITY_DISABLE, // 奇偶校验
.stop_bits = UART_STOP_BITS_1, // 停止位
.flow_ctrl = UART_HW_FLOWCTRL_DISABLE, // 流控制
};
// 配置UART参数
uart_param_config(uart_num, &uart_config);
// 设置UART引脚
// 设置UART的TX和RX引脚
uart_set_pin(uart_num, tx_pin, rx_pin, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE);
// 安装UART驱动程序
// 安装UART驱动程序
uart_driver_install(uart_num, 1024 * 2, 0, 0, NULL, 0);
}
// 发送数据
void Uart::write(const char* data, int len) {
// 调用ESP-IDF库函数来发送数据
uart_write_bytes(_uart_num, data, len);
}
// 接收数据
int Uart::read(uint8_t* buf, int len) {
// 调用ESP-IDF库函数来接收数据
return uart_read_bytes(_uart_num, buf, len, 1000 / portTICK_PERIOD_MS);
}
main.cpp
/**
* @file main.cpp
* @author 宁子希 (1589326497@qq.com)
* @brief 串口通信实验
* @version 0.1
* @date 2024-03-13
*
* @copyright Copyright (c) 2024
*
*/
#include <iostream>
#include <string>
#include "USART.h"
using namespace std;
extern "C" void app_main(void){
// 创建一个Uart对象使用UART_NUM_1 TX:8 RX:9
Uart uart1(UART_NUM_1, 8, 9);
// 发送数据
uart1.write("Hello, ESP32!", 13);
while(true){
// 接收数据
uint8_t buf[128];
int len = uart1.read(buf, sizeof(buf));
// 处理接收到的数据
if (len > 0) {
// 假设我们只是简单地将接收到的数据打印出来
for (int i = 0; i < len; i++) {
printf("%c", buf[i]);
}
printf("\n");
// 然后我们可以再次发送处理后的数据
uart1.write((const char*)buf, len);
}
}
}
总结
更加详细的内容可以去看看官方的资料:
ESP32S3 USART 官方手册