摘要:
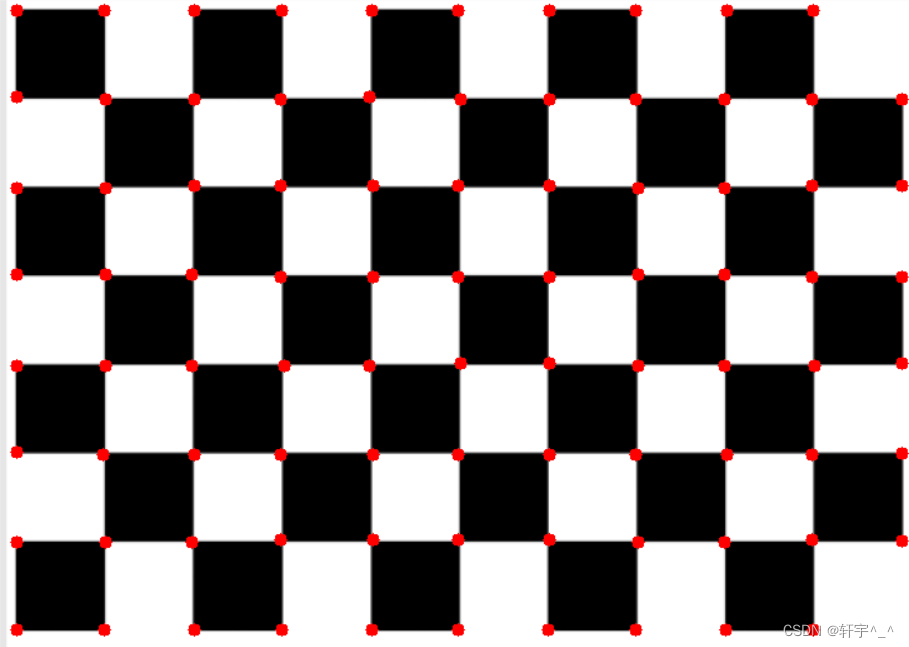
rs()绘制角点。
5. 重复以上步骤,直到所有图片处理完毕。
6. 6. 使用calibrateCamera()函数计算相机参数。
代码示例:
import cv2
import numpy as np
# 读取标定图片
img = cv2.imread('calibration.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 定义棋盘格尺寸
chessboard_size = (9, 6)
# 识别棋盘格角点
ret, corners = cv2.findChessboardCorners(gray, chessboard_size, None)
if ret:
# 绘制角点
cv2.drawChessboardCorners(img, chessboard_size, corners, ret)
cv2.imshow('img', img)
cv2.waitKey(0)
# 计算相机参数
object_points = np.zeros((np.prod(chessboard_size), 3), dtype=np.float32)
object_points[:, :2] = np.mgrid[0:chessboard_size[0], 0:chessboard_size[1]].T.reshape(-1, 2)
image_points = corners.reshape(-1, 2)
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera([object_points], [image_points], gray.shape[::-1], None, None)
技巧与实践
概念介绍
- 使用findChessboardCorners()函数识别棋盘格时,可以设置角点搜索的精确度。
-
- drawChessboardCorners()函数可以用于可视化识别结果。
实践案例
在标定图片时,可以适当增加棋盘格的倾斜角度,以获得更准确的标定结果。
常见问题与解答
Q1:如何确保标定图片的质量?
A1:确保拍摄环境光线均匀,避免棋盘格反光,增加棋盘格的倾斜角度。
Q2:如何处理识别失败的图片?
A2:可以尝试调整图片的对比度和亮度,然后再次识别。
结论与展望
相机标定是计算机视觉中的基础步骤。通过本文的介绍,读者可以掌握使用OpenCV进行相机标定的基本方法和技巧,为后续的视觉项目奠定基础。未来的工作可以考虑结合深度学习等先进技术,进一步提高标定精度和效率。
本文介绍了使用OpenCV进行相机标定的基本步骤,重点讨论了如何识别棋盘并绘制角点。内容包括基础知识回顾、方案设计、实现步骤、代码示例、技巧与实践、常见问题与解答等。本文旨在帮助读者掌握相机标定的基本方法和技巧,为后续的计算机视觉项目奠定基础。
阅读时长:约60分钟
关键词:OpenCV、相机标定、棋盘识别、角点绘制
引言
背景介绍
相机标定是计算机视觉中的基础步骤,用于获取相机的内参和外参。准确标定对后续的视觉任务至关重要。
文章目的
本文旨在详细介绍如何使用OpenCV进行相机标定,重点关注棋盘识别和角点绘制。
基础知识回顾
基本概念
相机标定是确定相机内参矩阵和外参矩阵的过程。内参矩阵描述相机本身的属性,外参矩阵描述相机在世界坐标系中的位置和姿态。
核心组件
- 内参矩阵:描述相机焦距、主点等属性。
-
- 外参矩阵:描述相机在世界坐标系中的位置和姿态。
-
- 棋盘格:用于获取图像中的角点。
-
- 角点检测:识别棋盘格中的角点。
工作流程
- 准备标定图片:在不同角度拍摄棋盘格图片。
-
- 识别图片中的棋盘格。
-
- 提取棋盘格中的角点。
-
- 利用角点坐标计算相机参数。
-
- 校验标定结果。
需求分析
- 准确识别棋盘格。
-
- 精确提取角点坐标。
-
- 计算相机内参和外参。
设计方案
实现步骤
- 读取标定图片。
-
- 将图片转换为灰度图。
-
- 使用findChessboardCorners()函数识别棋盘格。
-
- 如果识别成功,使用drawChessboardCorne