can.c
#include "can.h"
can_trasnmit_message_struct transmit_message;
//传入参数为0,则初始化CAN0的GPIO引脚;传入参数为1,则初始化CAN1的GPIO引脚
void CanGpioInit(void)
{
/* enable can clock */
rcu_periph_clock_enable(RCU_CAN0);
rcu_periph_clock_enable(RCU_GPIOD);
/* configure CAN0 GPIO, CAN0_TX(PD1) and CAN0_RX(PD0) */
gpio_output_options_set(GPIOD, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_1);
gpio_mode_set(GPIOD, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_1);
gpio_af_set(GPIOD, GPIO_AF_9, GPIO_PIN_1);
gpio_output_options_set(GPIOD, GPIO_OTYPE_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_0);
gpio_mode_set(GPIOD, GPIO_MODE_AF, GPIO_PUPD_NONE, GPIO_PIN_0);
gpio_af_set(GPIOD, GPIO_AF_9, GPIO_PIN_0);
}
//初始化CAN和配置过滤器,不过滤任何ID
void can_networking_init(void)
{
can_parameter_struct can_parameter;
can_filter_parameter_struct can_filter;
/* initialize CAN structures */
can_struct_para_init(CAN_INIT_STRUCT, &can_parameter);
can_struct_para_init(CAN_FILTER_STRUCT, &can_filter);
/* initialize CAN register */
can_deinit(CAN0);
/* initialize CAN */
can_parameter.time_triggered = DISABLE;
can_parameter.auto_bus_off_recovery = ENABLE;
can_parameter.auto_wake_up = DISABLE;
can_parameter.auto_retrans = ENABLE;
can_parameter.rec_fifo_overwrite = DISABLE;
can_parameter.trans_fifo_order = DISABLE;
can_parameter.working_mode = CAN_SILENT_LOOPBACK_MODE;
can_parameter.resync_jump_width = CAN_BT_SJW_1TQ;
can_parameter.time_segment_1 = CAN_BT_BS1_7TQ;
can_parameter.time_segment_2 = CAN_BT_BS2_2TQ;
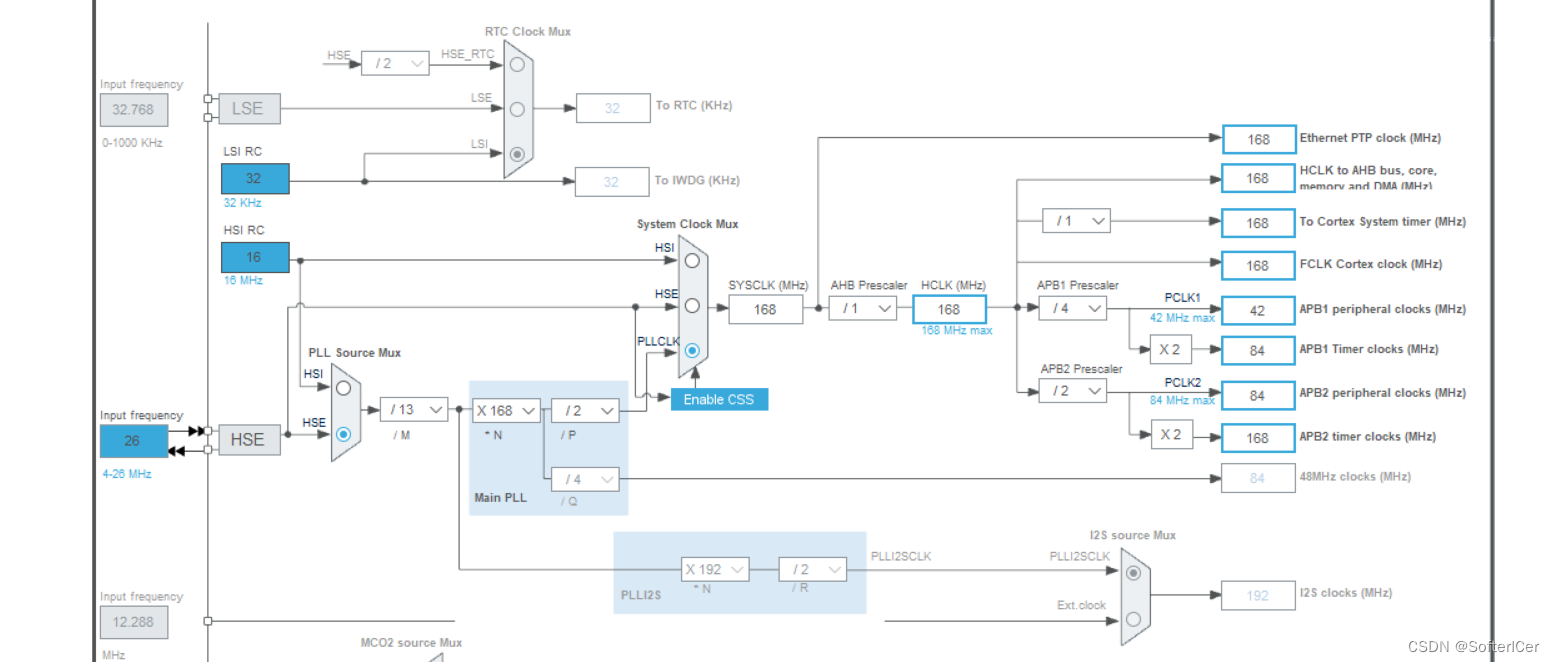
/* baudrate 1Mbps */
can_parameter.prescaler = 5;
can_init(CAN0, &can_parameter);
/* initialize filter */
/* CAN0 filter number */
can_filter.filter_number = 0;
/* initialize filter */
can_filter.filter_mode = CAN_FILTERMODE_MASK;
can_filter.filter_bits = CAN_FILTERBITS_32BIT;
can_filter.filter_list_high = 0x0000;
can_filter.filter_list_low = 0x0000;
can_filter.filter_mask_high = 0x0000;
can_filter.filter_mask_low = 0x0000;
can_filter.filter_fifo_number = CAN_FIFO0;
can_filter.filter_enable = ENABLE;
can_filter_init(&can_filter);
//使能CAN0的接收中断
nvic_irq_enable(CAN0_RX0_IRQn, 0, 0);
can_interrupt_enable(CAN0, CAN_INTEN_RFNEIE0);
}
uint8_t can_send_msg(uint32_t id, uint8_t *msg, uint8_t len)
{
uint32_t timeout = 0xFFFF;
uint8_t transmit_mailbox = 0;
transmit_message.tx_sfid = id;
transmit_message.tx_efid = id;
transmit_message.tx_ft = CAN_FT_DATA;
transmit_message.tx_ff = CAN_FF_STANDARD;
transmit_message.tx_dlen = len;
for(int i=0;i<len;i++)
{
transmit_message.tx_data[i] = msg[i];
}
transmit_mailbox = can_message_transmit(CAN0, &transmit_message);
/* waiting for transmit completed */
timeout = 0xFFFF;
while((CAN_TRANSMIT_OK != can_transmit_states(CAN0, transmit_mailbox)) && (0 != timeout)){
timeout--;
}
if(timeout==0)
{
return 1;//发送失败
}
return 0;//发送成功
}
can.h
#ifndef __CAN_H
#define __CAN_H
#include "head.h"
void CanGpioInit(void);
void can_networking_init(void);
uint8_t can_send_msg(uint32_t id, uint8_t *msg, uint8_t len);
extern can_trasnmit_message_struct transmit_message;
#endif
中断处理函数
char receive_flag;
can_receive_message_struct receive_message;
void CAN0_RX0_IRQHandler(void)
{
/* check the receive message */
can_message_receive(CAN0, CAN_FIFO0, &receive_message);
if((0x7ab == receive_message.rx_sfid)&&(CAN_FF_STANDARD == receive_message.rx_ff) && (8 == receive_message.rx_dlen)){
receive_flag = 1;
}
}主函数
CanGpioInit();
can_networking_init();
uint8_t buf[8];
buf[0] = 0xA0;
buf[1] = 0xA1;
buf[2] = 0xA2;
buf[3] = 0xA3;
buf[4] = 0xA4;
buf[5] = 0xA5;
buf[6] = 0xA6;
buf[7] = 0xA7;
while(1){
can_send_msg(0x7ab,buf,8);
if(1 == receive_flag)
{
receive_flag = 0;
for(int i = 0; i < receive_message.rx_dlen; i++){
printf(" %02x", receive_message.rx_data[i]);
}
}
}

























![[C#]IL指令](https://img-blog.csdnimg.cn/img_convert/913effb50dcaac79f9ee7413e2d4af77.png)