1 毫米波雷达的原理
汽车引入毫米波雷达最初主要是为了实现盲点监测和定距巡航。毫米波实质上是电磁波,其频段位于无线电和可见光、红外线之间,频率范围为10GHz-200GHz。工作原理类似一般雷达,通过发射无线电波并接收回波,利用障碍物反射波的时间差确定障碍物距离,通过反射波的频率偏移确定相对速度。
2 毫米波雷达未被抛弃的原因
2.1 天气原因
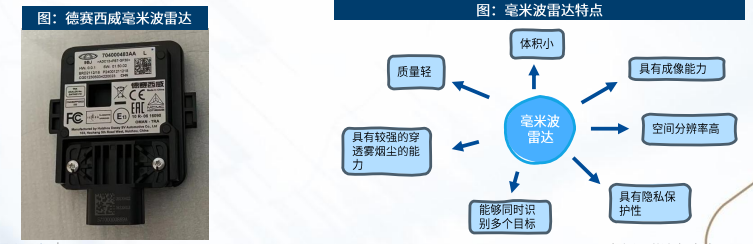
激光雷达在极端天气下性能受限,而毫米波雷达能够穿透雾、雨、雪等,适应各种天气条件。毫米波雷达在高速行驶场景中表现更出色,其探测距离可轻松超过200米,明显优于激光雷达的150米。
2.2 成本价格
激光雷达因收发器和组装工艺要求高而成本难降,而毫米波雷达采用硅基芯片制造,成本更具竞争优势。毫米波雷达的价格约为1.5千元,而激光雷达则以万元计价。此外,激光雷达获取的大量数据需要更高性能的处理器,增加了整体成本。在简单场景中,工程师更倾向选择毫米波雷达。
3 毫米波雷达芯片发展趋势
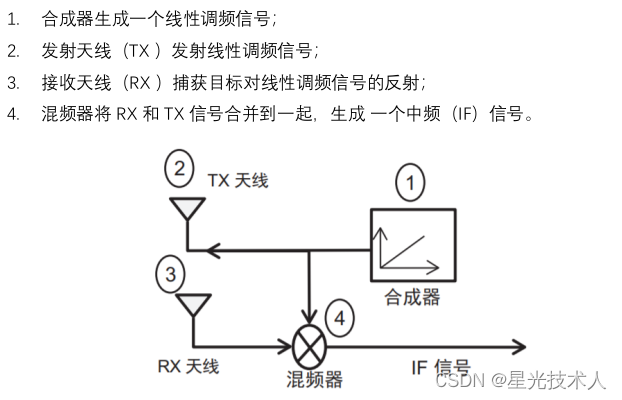
当前汽车领域的毫米波雷达主要采用FMCW技术,即通过调频毫米波信号来确定目标位置和相对速度。发展趋势包括:
3.1 从24GHz到77GHz频段的演进
汽车领域常见的毫米波雷达频段包括24GHz、77GHz和79GHz。随着24GHz频段的规划过期,77GHz频段成为主流,具备更好的性能,特别在紧急制动和自动跟车等领域。
3.2 CMOS工艺的主流化
传统的III-V族工艺成本高,而CMOS工艺在28nm节点后已能满足毫米波雷达的要求,逐渐成为主流工艺。
3.3 走向高分辨率
随着自动驾驶的发展,毫米波雷达逐渐追求高分辨率,特别在空间分辨率上。在自动驾驶领域,高带宽的79GHz频段将得到广泛应用。
4 主要区别

三者对比:
- 分辨率:相机最高,Lidar次之,Radar最低
- 抗天气影响能力:Radar最好,Camera次之,Lidar最低
- 追踪物体速度能力:Radar最好,Camera和Lidar差不多
- 追踪物体高度能力:Lidar最好,Camera次之,Radar最低
- 追踪距离能力:Lidar,Radar都很准确,Camera最低
- 辨别能力:Camera和Lidar都较好,Radar较低
5 总结
毫米波雷达作为传感器难以被取代,其全天候工作状态、高测速、测距精度以及穿透力是其最大优势。尽管存在不足,但未来趋势将走向融合,特别是在自动驾驶领域,三大传感器将相互融合。