0 工具准备
TJA1101B芯片手册
TJA1101B automotive Ethernet PHY手册
IEEE802.3-2018.pdf
1 车载以太网PHY(物理层)介绍
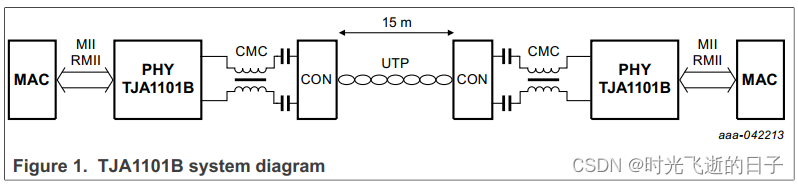
常见的普通以太网分为10BASE-2、10/100BASE-TX和1000BASE-T,一般都使用RJ45接口,对于1000BASE-T来说,它使用4对双绞线一共8根线来传输数据。而车载以太网一般采用T1标准,例如TJA1101使用的100BASE-T1,它使用一对双绞线一共2根线来传输数据,最大支持长度为15米。2个车载以太网phy芯片连接方式如下:
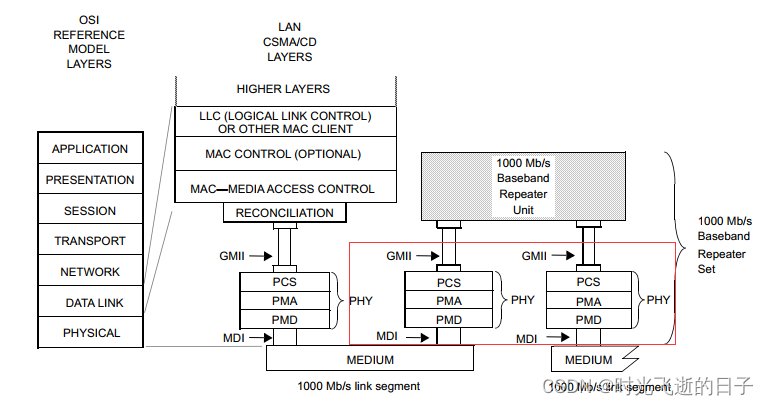
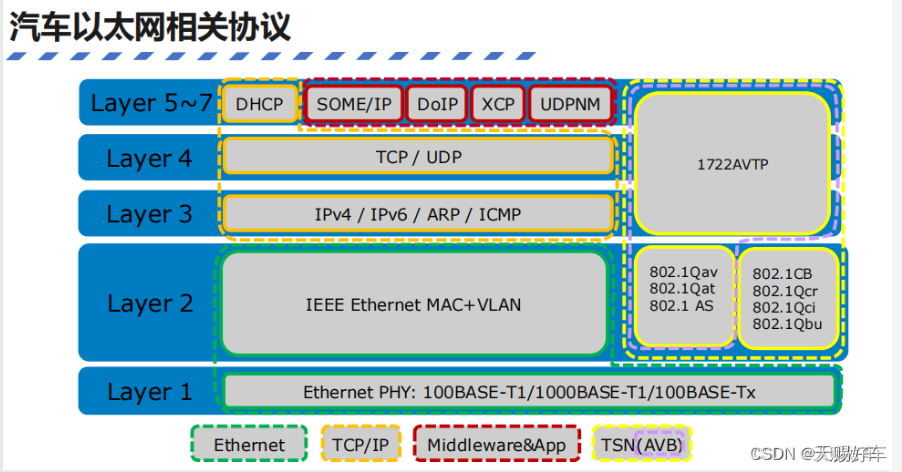
车载以太网除了物理层和普通以太网有所区别外,应用层、传输层、数据链路层和普通以太网并无区别。在IEEE802.3-2018中的描述如下:

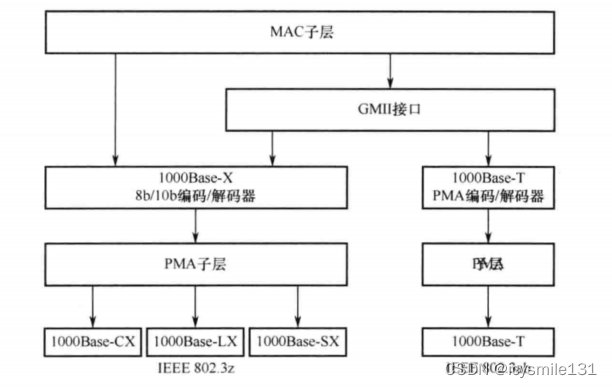
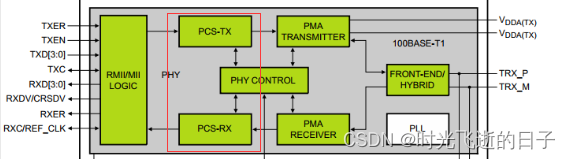
其中物理层通过PHY芯片实现,车载以太网PHY芯片组成框架(参见IEEE802.3-2018)如下:
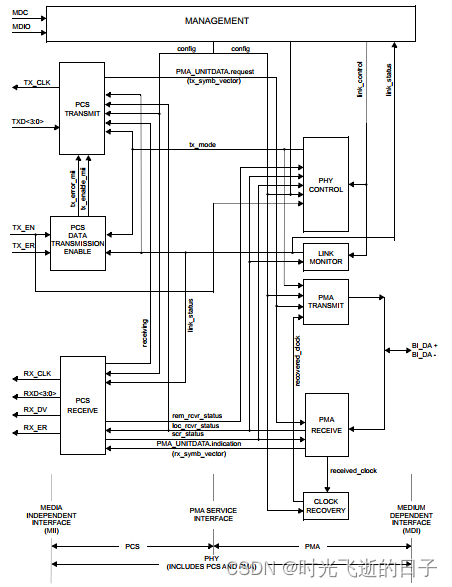
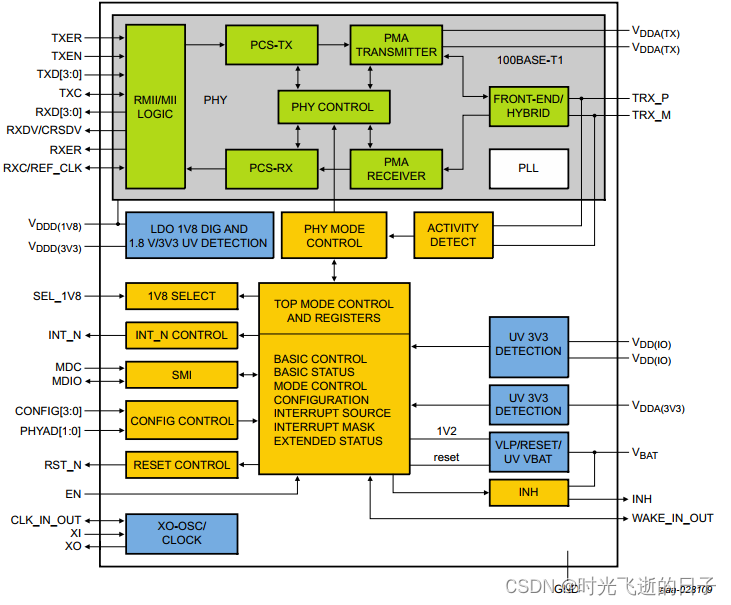
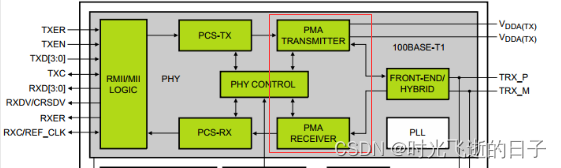
所有车载以太网PHY芯片都应该按照上图设计,以TJA1101为例,它的设计框图如下:
1.1 车载以太网的编码格式
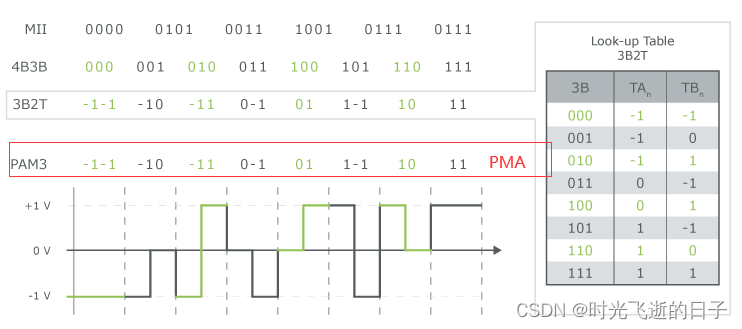
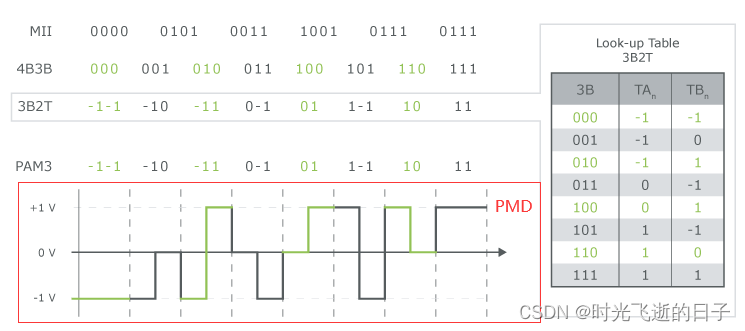
车载以太网和普通以太网使用0、1电平表示逻辑“0”和“1”不一样,车载以太网使用-1、0、1的电平表示3个逻辑。因此同样实现100Mbps通信,车载以太网的载波频率只需要为100*2/3=66.67MHz即可。下面这张图就演示了从MII发送过来的2进制数据是如何编码完成的:
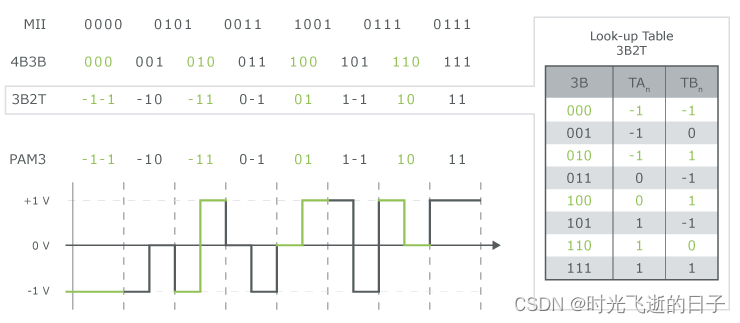
通过上图可以看到,24bit的2进制数据被编码成了16bit的3进制数据,因此车载以太网只需要66.67MHz的载波频率便能实现100MHz的数据传输速率。
1.2 车载以太网如何实现的全双工
常见的CAN、RS485使用一对双绞线的差分信号传输数据,是无法做到全双工的。车载以太网通过回声消除(echo cancellation)技术实现全双工。它的基本实现原理如下:
(1)PHY芯片发送数据时将自己的PAM3电压加到双绞线上
(2)PHY芯片接收数据时将双绞线上的电压减去自己的施加的PAM3电压,得到对端PHY芯片发送的数据
以上2个步骤是同时进行的,因此可以实现全双工通信。
1.3 车载以太网主机和从机
普通以太网在物理层是没有主从之分的,一般都是人为在应用层定义通讯双方的主从关系,而车载以太网在物理层就定义了主、从关系。
之所以会在物理层定义主机和从机,就是为了实现1.2中介绍的回音消除功能。2个PHY芯片一个作为主机,另一个作为从机。当2个PHY芯片连接时,它们会经过训练过程,从而使被测设备(DUT)和链路伙伴以相同的频率和相位传输信息。主机和从机建立连接的状态机切换如下:
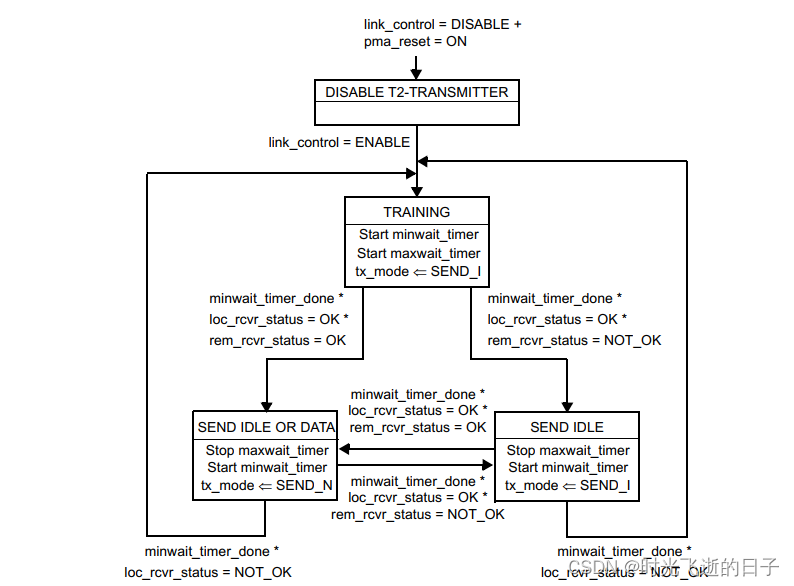
一次主从正常配对流程如下:
(1)主机进入TRAINING(训练)状态,训练从机的扰码器、均衡器、时钟
(2)训练完成后主机和从机均进入SEND IDLE OR DATA(发送空闲或数据)状态
1.4 RMII(简化媒体独立接口)/MII(媒体独立接口)

RMII/MII是MAC层和PHY进行通信的一部分,对于100Mbps的phy芯片而言,使用的工作时钟为25MHz。
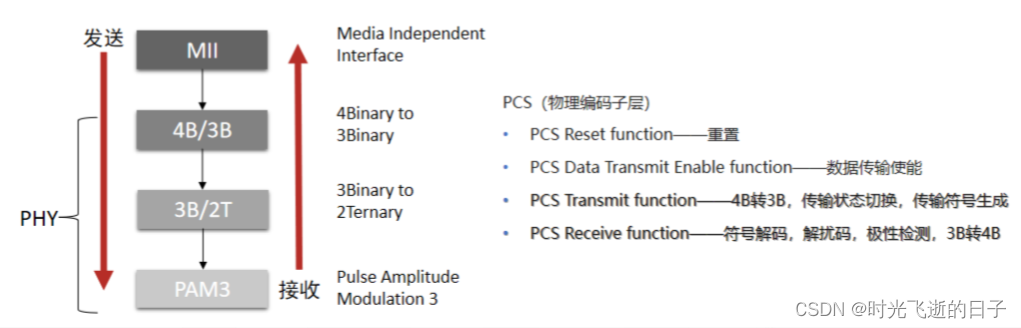
1.5 PCS(物理编码子层)
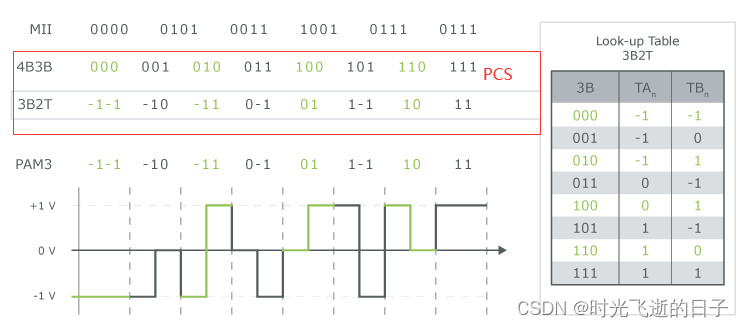
PCS主要负责数据编码、解码。PCS将从MAC层(通过RMII/MII)传过来的数据按照物理层实现要求转换为特定的比特序列,然后传输给PMA。在接收到PMA传输过来的数据后,又将数据解码传输给MAC层(通过RMII/MII)。
PCS层实现的工作如下:
1.6 PMA(物理媒介附加)
PMA负责将PCS创建的比特组转换为比特流然后向下发送给PMD子层。收到数据后,PMA执行相反的操作。此外,PMA还履行冲突检测和时钟恢复功能。
PMA层实现的工作如下:
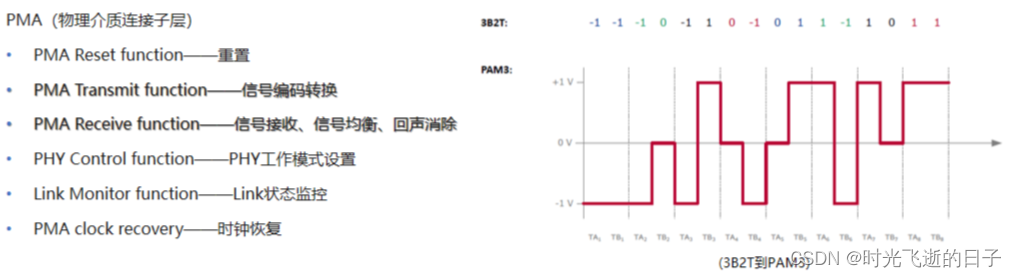
PMA子层做的PAM3转换都是数字信号,还需要MDI物理介质转换为模拟信号。
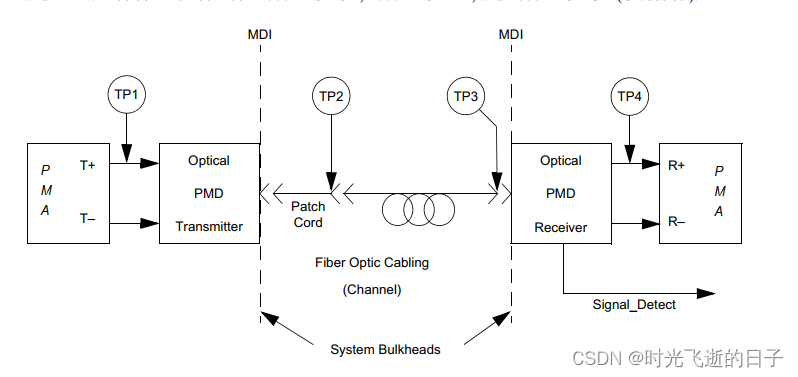
1.7 PMD(物理媒介相关)
该子层用来生成和传输模拟信号(电信号或光信号)来发送数据,同时还负责接收和解释模拟信号(电信号或光信号)来接收数据。在某些情况下不需要PMD子层,该子层直接由PMA子层提供。
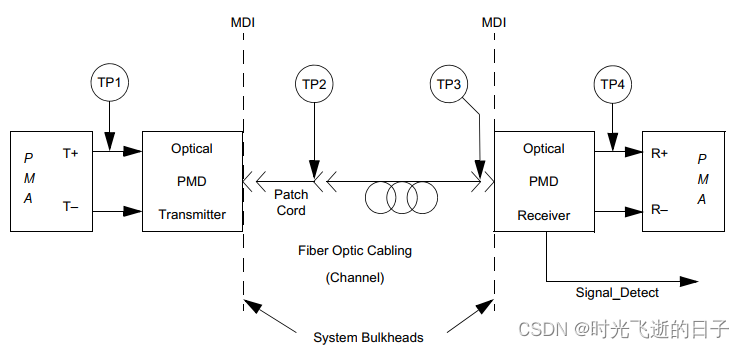
PMD层实现的工作如下:
1.8 MDI(与媒介有关接口)
该接口为以太网物理层和数据传输媒介间的物理接口,通常是指以太网自主局或控制器连接至电缆的物理连接器(例如RJ45网口)。
1.9 物理媒介
物理媒介也就是传输数据的实际物理导线或电缆,对于100BASE-T1车载以太网来说就是一对非屏蔽双绞线。

2 总结
(1)车载以太网需要定义连接双方的主从关系,可以使能自协商功能(耗时较长)或者指定主从关系及速率
(2)PCS、PMA、PMD组成了车载以太网PHY的核心部分
(3)某些情况下PMD的实现可以包含在PMA内
(4)有关车载以太网PHY的简易框图可以表示如下: