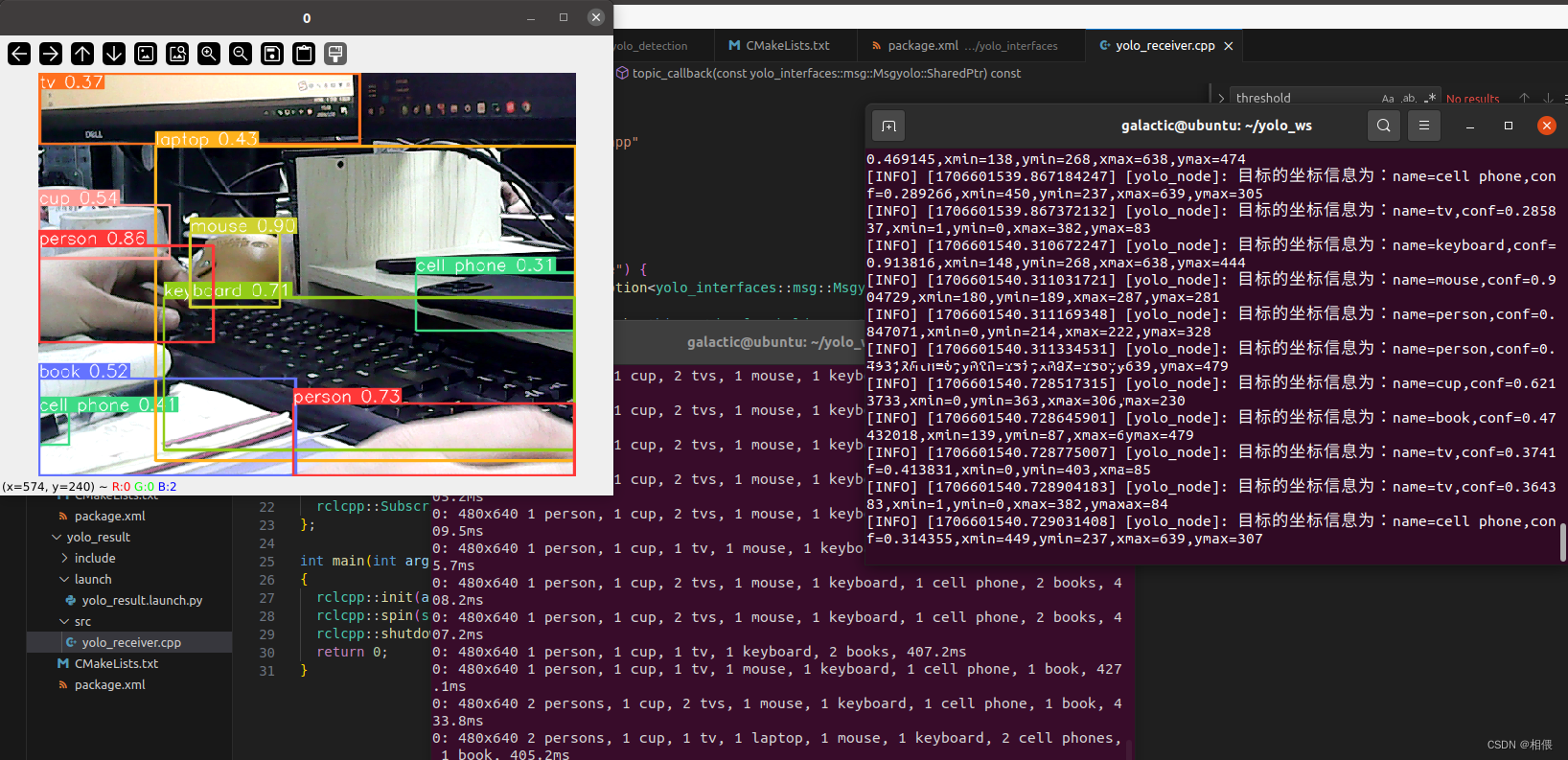
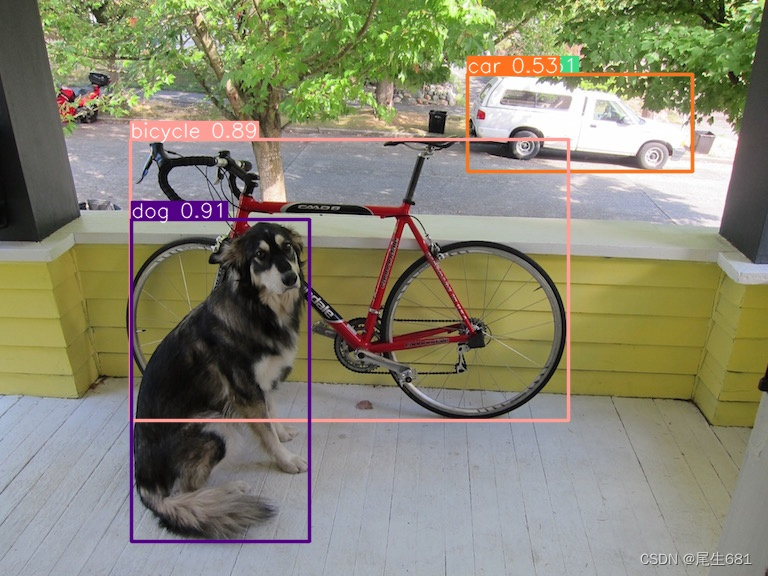
- 用yolov8实时检测物体,包括物体的类别,置信度和坐标
- 通过ros2发布出去
- 效果图如下
具体实现 链接: https://blog.csdn.net/u013932564/article/details/135935365?csdn_share_tail=%7B%22type%22%3A%22blog%22%2C%22rType%22%3A%22article%22%2C%22rId%22%3A%22135935365%22%2C%22source%22%3A%22u013932564%22%7D
ros2配合yolov8使用效果
2024-02-01 17:30:06 33 阅读
![【<span style='color:red;'>YOLOv</span><span style='color:red;'>8</span>改进[Backbone]】<span style='color:red;'>使用</span>SCINet改进<span style='color:red;'>YOLOv</span><span style='color:red;'>8</span>在黑暗环境的目标检测<span style='color:red;'>效果</span>](https://img-blog.csdnimg.cn/direct/697db0066c6f40b88756e27ad9e49b6f.png)























![第九章[函数]:9.15:求最小值/最大值](https://img-blog.csdnimg.cn/img_convert/c942fa61f48649c4ea9401c3db578b4c.jpeg)