⛳️ 推荐
前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站。
引入
轨迹绘制是一项重要的技术,它在各个领域中都具有广泛的应用。无论是在自动驾驶系统中,还是在运动轨迹分析方面,轨迹绘制都能提供有关运动和路径的有用信息。本文将介绍轨迹绘制的基本原理和常见应用场景,并探索一些用于路径规划和轨迹可视化的技术。
- 下面我们就来使用Apollo 的Dreamview+工具来试下吧
步骤一:安装并启动 Dreamview+
这里可以去看一下官方的启动文档哦,博主就不过多演示了
- 社区操作文档 https://apollo.baidu.com/
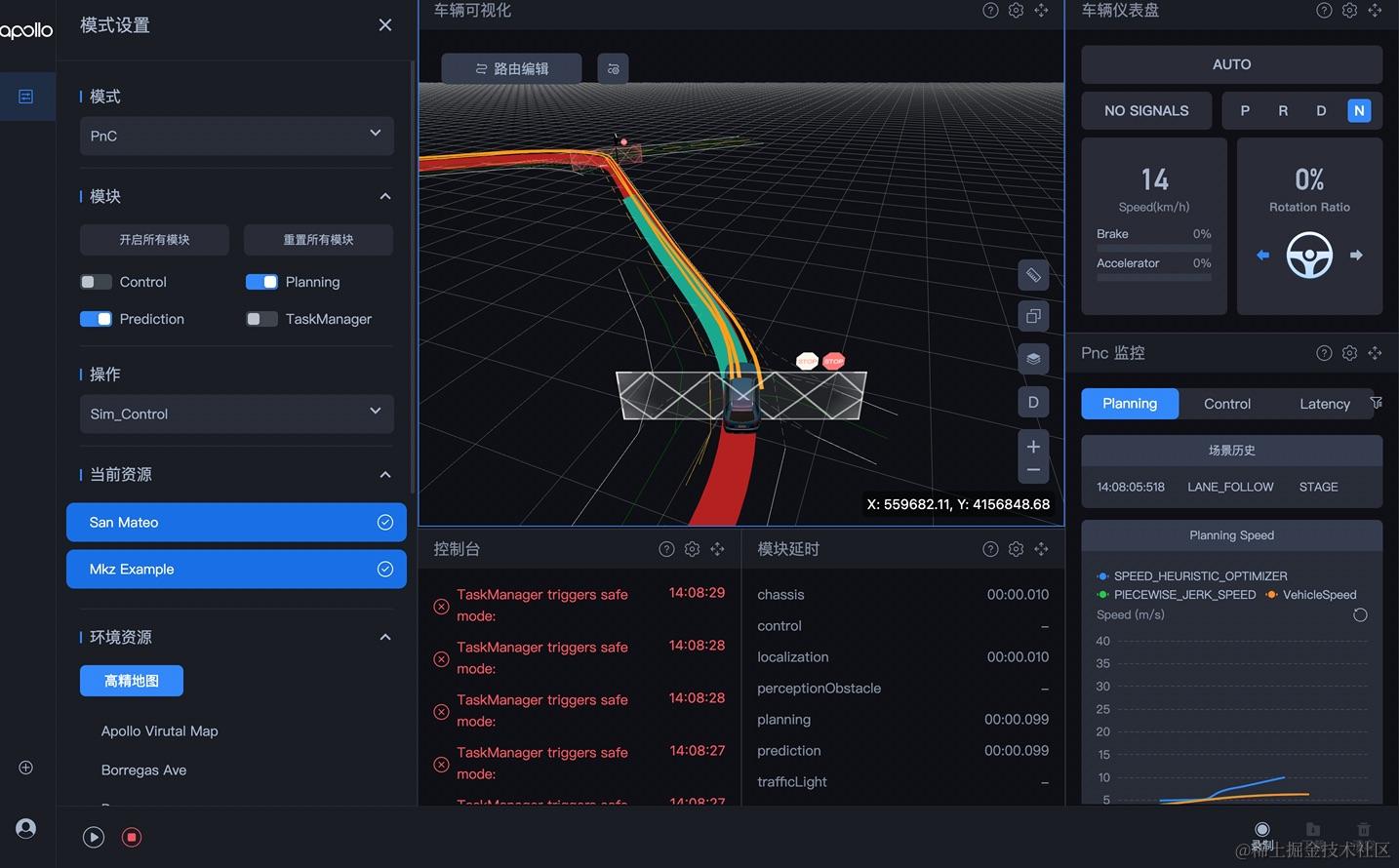
步骤二:选择仿真模式
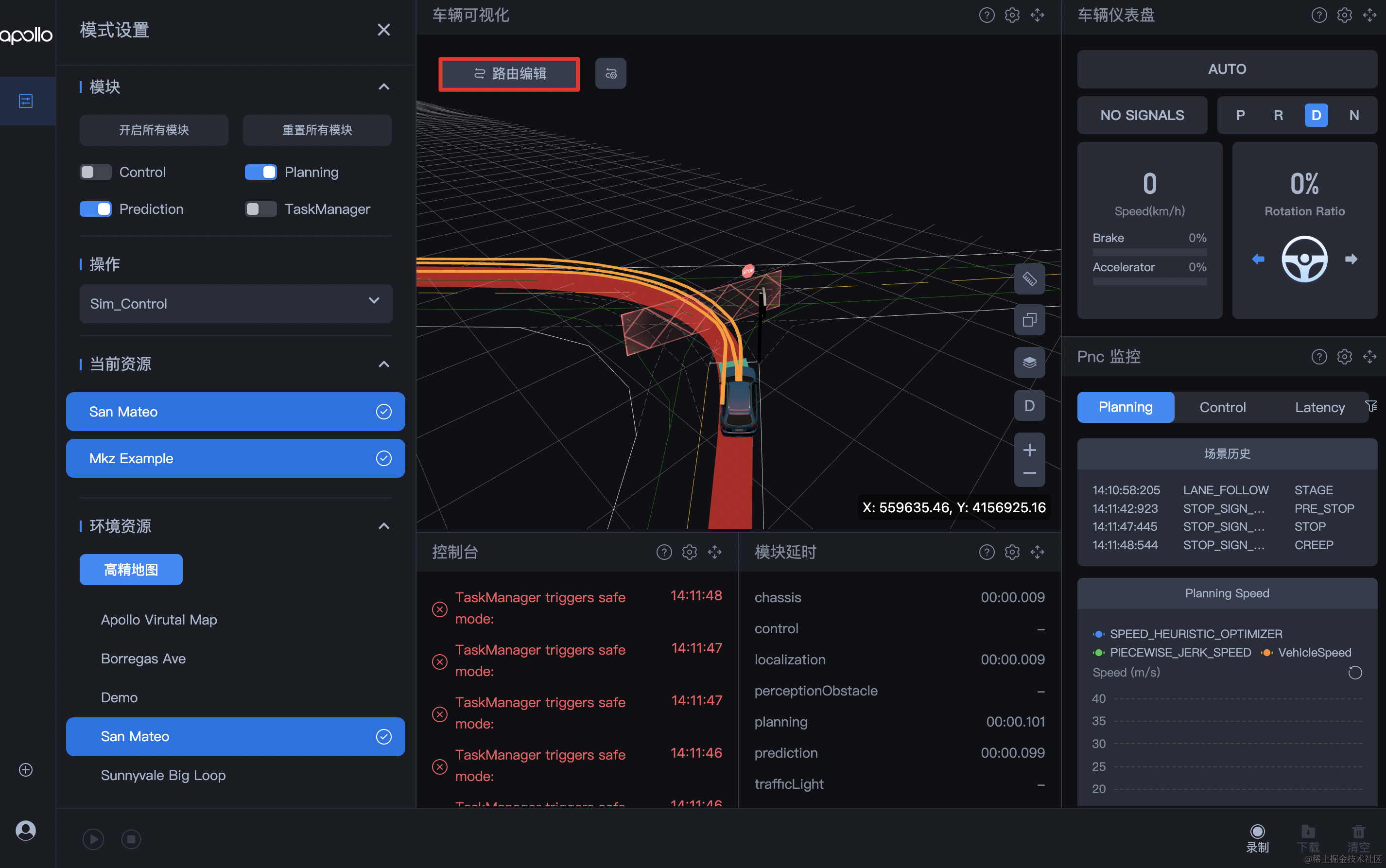
在 操作 中选择 Sim_Control 或者 Scenario_Sim 。此处以 Sim_Control 为例。
步骤三:选择地图和车辆
在 环境资源 中选择地图。此处以 San Mateo 为例。
在 自动驾驶系统资源 中选择车辆。此处以 Mkz Example 为例。
注意:车辆为可选操作。
步骤四:开启轨迹绘制
- 在 车辆可视化 面板中单击 路由编辑 开启路由编辑功能。
- 单击左上角初始位置图标,在地图上单击设定初始位置。
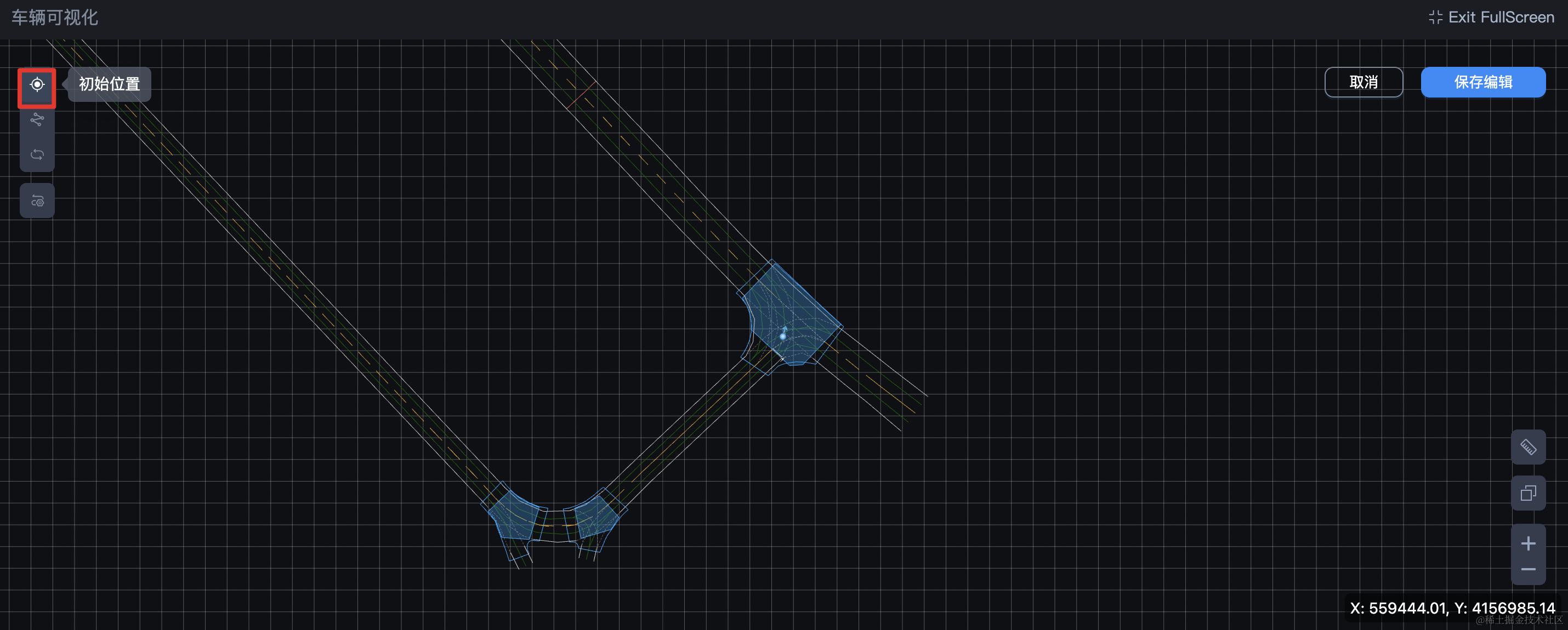
注意:长按鼠标右键可以拖拽移动地图位置。
- 单击左上角轨迹点图标,在地图上单击添加途径轨迹点。
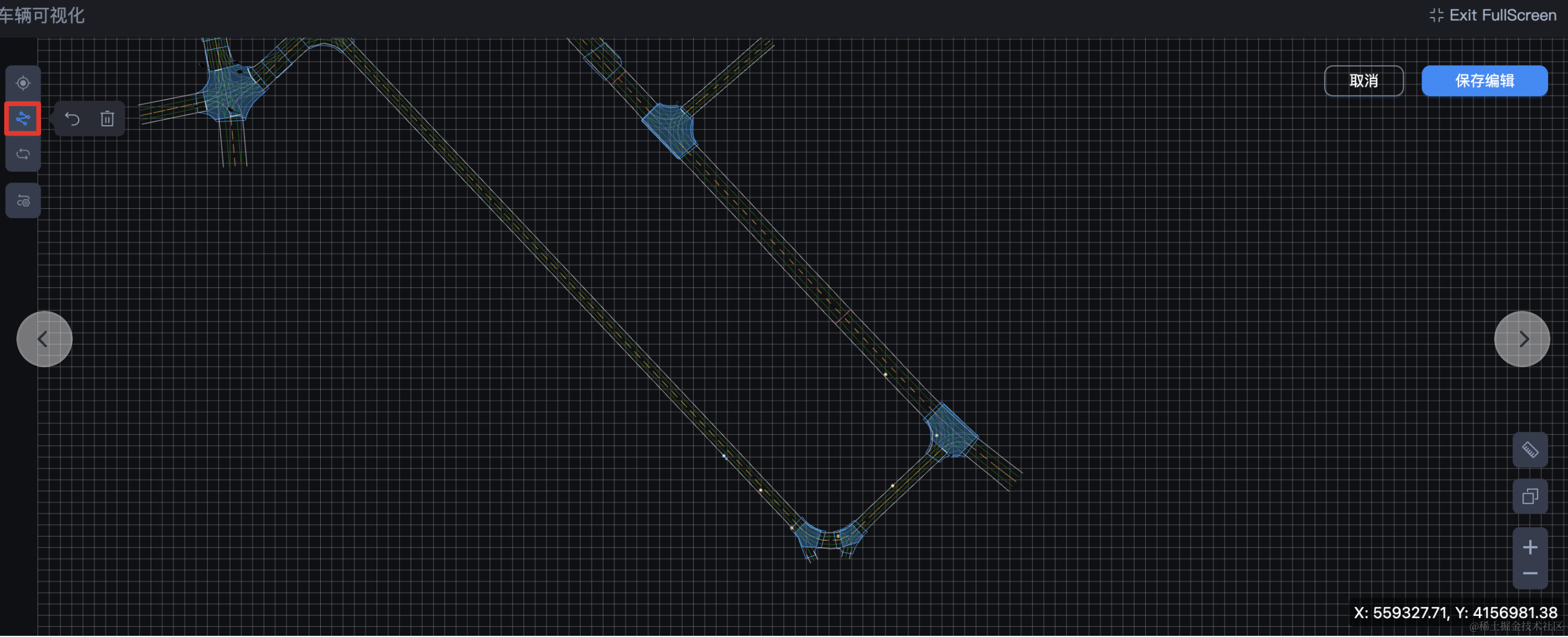
注意:长按拖拽可以修改初始位置和轨迹点的方向。
- 单击 保存编辑 ,完成轨迹绘制。
步骤五:开启模块,查看规划效果
开启 Planning 和 Prediction 模块,并打开底部操作栏的播放按钮,查看规划效果。