一、ros功能包重名——ros工作空间覆盖
功能包重名时,会按照 ROS_PACKAGE_PATH 查找,在前的会优先执行。ROS 会解析 .bashrc 文件,并生成 ROS_PACKAGE_PATH ROS包路径,即调用功能包的顺序,该变量中按照 .bashrc 中配置设置工作空间优先级,且ROS_PACKAGE_PATH 中的值,和 .bashrc 的配置顺序相反(后配置的优先级更高)
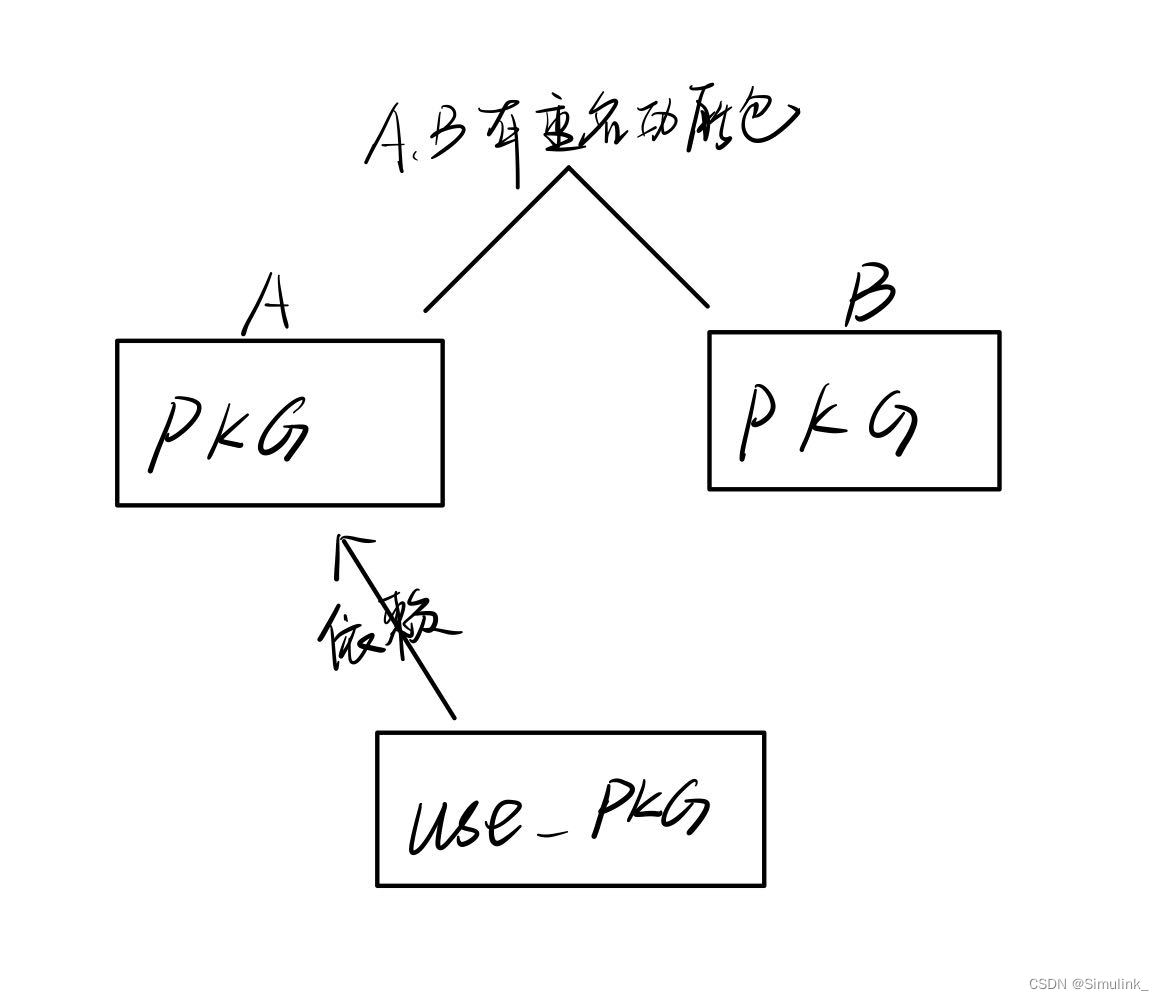
当然,功能包出现重名时,会出现安全隐患。比如,工作空间A、B下有重名功能包PKG,而B在配置文件中的优先级更高,则在刷新环境变量时,B会将A覆盖。此时即使use_PKG的实现依赖于A中的PKG,但是按照ROS工作空间覆盖的原则,实际执行时将会调用工作空间B的PKG,从而导致执行异常,出现安全隐患。
二、ros节点重名
C++初始化节点时通过API:ros::init(argc,argv,"xxxx");来定义节点名称。在ROS的网络拓扑中,是不可以出现重名的节点的,因为假设可以重名存在,那么调用时会产生混淆,这也就意味着,不可以启动重名节点或者同一个节点启动多次,的确,在ROS中如果启动重名节点的话,之前已经存在的节点会被直接关闭。
但是如果需要同时多次开启两个同名的节点,在ROS中给出的解决策略是使用命名空间或名称重映射。命名空间就是为名称添加前缀,名称重映射是为名称起别名。
2.1 rosrun设置命名空间与重映射
2.1.1 rosrun设置命名空间
语法:rosrun 包名 节点名 __ns:=新名称以启动两个小乌龟节点为例:
rosrun turtlesim turtlesim_node __ns:=/first
rosrun turtlesim turtlesim_node __ns:=/second
这样两个同名的节点就可以同时运行了。可以通过rosnode list查看节点信息:
/first/turtlesim
/second/turtlesim
很明显,两个同名节点是以在不同命名空间下运行的形式(加前缀)实现同时启动的。
2.1.2 rosrun名称重映射
语法: rosrun 包名 节点名 __name:=新名称以启动两个小乌龟节点为例:
rosrun turtlesim turtlesim_node __name:=dog | rosrun turtlesim turtlesim_node /turtlesim:=dog
rosrun turtlesim turtlesim_node __name:=cat | rosrun turtlesim turtlesim_node /turtlesim:=cat通过rosnode list查看节点信息:
/dog
/cat可以看到出现的节点名是重命名后的名称(起别名)。
2.1.3 rosrun命名空间与名称重映射叠加
当然设置命名空间和重命名可以一起使用:
rosrun turtlesim turtlesim_node __ns:=/first __name:=dog
rosrun turtlesim turtlesim_node __ns:=/second __name:=cat通过rosnode list查看节点信息:
/first/dog
/second/cat2.2 launch文件设置命名空间与重映射
在之前关于launch文件的笔记中,node标签中有两个属性:name和ns,二者分别是用于实现名称重映射与命名空间设置的。在 node 标签中,name 属性是必须的,ns 可选。
以小乌龟节点为例:
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim" />
<!-- 命名空间 -->
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim" ns="first"/>
<!-- 名称重映射 -->
<node pkg="turtlesim" type="turtlesim_node" name="dog" />
<!-- 命名空间+名称重映射 -->
<node pkg="turtlesim" type="turtlesim_node" name="cat" ns="second"/>
</launch>
此时同时开启四个小乌龟界面,rosnode list查看节点信息:
/dog
/first/turtlesim
/second/cat
/turtlesim
2.3 编码设置命名空间与重映射
2.3.1 修改命名空间
std::map<std::string, std::string> map;
map["__ns"] = "first";
ros::init(map,"turtlesim");
会在turtlesim节点名前面添加first的命名空间。
2.3.2 重映射
ros::init(argc,argv,"turtlesim",ros::init_options::AnonymousName);会在名称后面根据时间戳,添加一个后缀编号。
三、ros话题重名
有些时候可能需要将相同的话题名称设置为不同,也有可能将不同的话题名设置为相同。在ROS中给出的解决策略与节点名称重命类似,也是使用名称重映射或为名称添加前缀。根据前缀不同,有全局、相对、和私有三种类型之分。
- 全局(参数名称直接参考ROS系统,与节点命名空间平级)
- 相对(参数名称参考的是节点的命名空间,与节点名称平级)
- 私有(参数名称参考节点名称,是节点名称的子级)
案例:在ROS中提供了一个比较好用的键盘控制功能包: ros-noetic-teleop-twist-keyboard,该功能包,可以控制机器人的运动,作用类似于乌龟的键盘控制节点。启动小乌龟节点后,前者任然不能控制乌龟运动,因为,二者使用的话题名称不同,前者使用的是 cmd_vel话题,后者使用的是 /turtle1/cmd_vel话题,需要将话题名称修改为一致,才能使用,如何实现?
3.1 rosrun设置话题重映射
只要使得teleop_twist_keyboard与乌龟显示节点的话题一致,就可以实现两者通信。
rosrun名称重映射语法: rorun 包名 节点名 话题名:=新话题名称方案1:将 teleop_twist_keyboard 节点的话题设置为/turtle1/cmd_vel
启动键盘控制节点:rosrun teleop_twist_keyboard teleop_twist_keyboard.py /cmd_vel:=/turtle1/cmd_vel
启动乌龟显示节点: rosrun turtlesim turtlesim_node
--------------------------------------------------------------------------------
方案2:将乌龟显示节点的话题设置为 /cmd_vel
启动键盘控制节点:rosrun teleop_twist_keyboard teleop_twist_keyboard.py
启动乌龟显示节点: rosrun turtlesim turtlesim_node /turtle1/cmd_vel:=/cmd_vel3.2 launch文件设置话题重映射
launch 文件设置话题重映射语法:
<node pkg="xxx" type="xxx" name="xxx">
<remap from="原话题" to="新话题" />
</node>
同样的只要订阅方和发布方话题一致就可以实现通信。
方案1:将 teleop_twist_keyboard 节点的话题设置为/turtle1/cmd_vel
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="t1" />
<node pkg="teleop_twist_keyboard" type="teleop_twist_keyboard.py" name="key">
<remap from="/cmd_vel" to="/turtle1/cmd_vel" />
</node>
</launch>
------------------------------------------------------------------------------------
方案2:将乌龟显示节点的话题设置为 /cmd_vel
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="t1">
<remap from="/turtle1/cmd_vel" to="/cmd_vel" />
</node>
<node pkg="teleop_twist_keyboard" type="teleop_twist_keyboard.py" name="key" />
</launch>
3.3 编码设置话题名称
在编码时,以全局、相对、和私有三种类型去命名话题可以有效的避免话题重名。
3.3.1 全局名称
格式:以/开头的名称,和节点名称无关
比如:
初始化节点:ros::init(argc,argv,"node")
启动节点时,设置一个工作空间 __ns:= xxx
发布:ros::Publisher pub = nh.advertise<std_msgs::String>("/abc/def/chatter",1000);
-----------------------------------------------------------------------------------
使用 rosnode 查看节点信息
对应节点名为:/xxx/node
使用 rostopic 查看话题信息
查看得话题名为:/abc/def/chatter (明显与设置的节点名无关)
3.3.2 相对名称
格式:非/开头的名称,参考命名空间(与节点名称平级)来确定话题名称
比如:
初始化节点:ros::init(argc,argv,"node")
启动节点时,设置一个工作空间 __ns:= xxx
发布:ros::Publisher pub = nh.advertise<std_msgs::String>("abc/def/chatter",1000);
-----------------------------------------------------------------------------------
使用 rosnode 查看节点信息
对应节点名为:/xxx/node
使用 rostopic 查看话题信息
对应话题名为:/xxx/abc/def/chatter (其与节点在同一命名空间“xxx”下,与节点名称平级)
3.3.3 私有名称
格式:以~开头的名称,需要创建特定的NodeHandle
初始化节点:ros::init(argc,argv,"node");
ros::NodeHandle nh("~");
启动节点时,设置一个工作空间 __ns:= xxx
ros::Publisher pub = nh.advertise<std_msgs::String>("abc/chatter",1000);
-------------------------------------------------------------------------
使用 rosnode 查看节点信息
对应节点名为:/xxx/node
使用 rostopic 查看话题信息
对应话题名为:/xxx/node/abc/chatter (话题名是节点名称的子级)
##需要注意的是,当使用~,而话题名称又是/开头时,那么话题名称是全局的!!!即全局的优先级更高。
ros::NodeHandle nh("~");
ros::Publisher pub = nh.advertise<std_msgs::String>("/abc/chatter",1000);
-----------------------------------------------------------------------------
对应话题名为:/abc/chatter四、ros参数重名
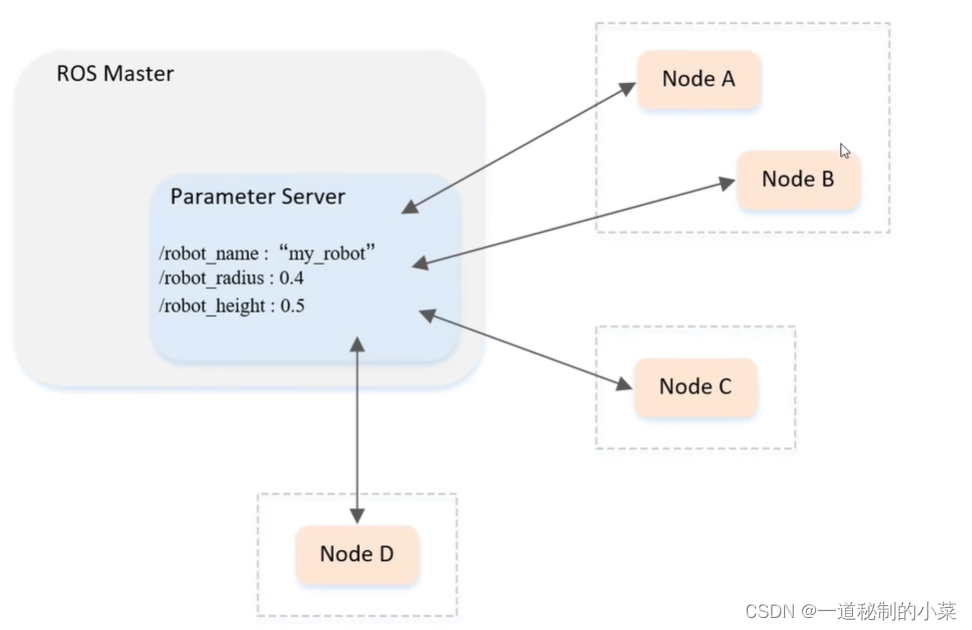
在ROS中参数名称也可能重名,当参数名称重名时,那么就会产生覆盖。关于参数重名的处理,没有重映射实现,为了尽量的避免参数重名,都是使用为参数名添加前缀的方式,实现类似于话题名称,有全局、相对、和私有三种类型之分。
- 全局(参数名称直接参考ROS系统,与节点命名空间平级)
- 相对(参数名称参考的是节点的命名空间,与节点名称平级)
- 私有(参数名称参考节点名称,是节点名称的子级)
设置参数的方式也有三种:
- rosrun 命令
- launch 文件
- 编码实现
4.1 rosrun设置参数
rosrun 在启动节点时,也可以设置参数:
语法:rosrun 包名 节点名称 _参数名:=参数值
启动乌龟显示节点,并设置参数 A = 100
rosrun turtlesim turtlesim_node _A:=100
-------------------------------------------
rosparam list查看节点信息
对应的参数名:/turtlesim/A (以私有的形式)4.2 launch文件设置参数
通过 launch 文件设置参数的方式,在launch文件的学习中学过,可以在 node 标签外,或 node 标签中通过 param 或 rosparam 来设置参数。在 node 标签外设置的参数是全局性质的,参考的是 / ,在 node 标签中设置的参数是私有性质的,参考的是 /命名空间/节点名称。
以 param 标签为例:
<launch>
<param name="p1" value="100" />
<node pkg="turtlesim" type="turtlesim_node" name="t1">
<param name="p1" value="100" />
</node>
</launch>
-------------------------------------------
rosparam list查看节点信息,对应的参数名为:
/p1
/t1/p1
4.3 编码设置参数
编码的方式可以更方便的设置:全局、相对与私有参数。
4.3.1 ros::param设置参数
设置参数调用的API是ros::param::set,该函数中,参数1传入参数名称,参数2是传入参数值,参数1中参数名称设置时,如果以 / 开头,那么就是全局参数,如果以 ~ 开头,那么就是私有参数,既不以 / 也不以 ~ 开头,那么就是相对参数。
ros::param::set("/set_A",100); //全局,和命名空间以及节点名称无关
ros::param::set("set_B",100); //相对,参考命名空间
ros::param::set("~set_C",100); //私有,参考命名空间与节点名称
4.3.2 ros::NodeHandle设置参数
设置参数时,首先需要创建 NodeHandle 对象,然后调用该对象的 setParam 函数,该函数参数1为参数名,参数2为要设置的参数值,如果参数名以 / 开头,那么就是全局参数,如果参数名不以 / 开头,如果NodeHandle 对象创那么,该参数是相对参数还是私有参数与NodeHandle 对象有关,建时如果是调用的默认的无参构造,那么该参数是相对参数,如果NodeHandle 对象创建时是使用ros::NodeHandle nh("~"),那么该参数就是私有参数。
ros::NodeHandle nh;
nh.setParam("/nh_A",100); //全局,和命名空间以及节点名称无关
nh.setParam("nh_B",100); //相对,参考命名空间
-------------------------------------
ros::NodeHandle nh_private("~");
nh_private.setParam("nh_C",100);//私有,参考命名空间与节点名称



















![[玄机]流量特征分析-蚁剑流量分析](https://img-blog.csdnimg.cn/direct/15ebd68186f1405ab0c2e1aaa397b1a5.png)