文章目录
1.本方向内学习内容:
1.1.动作:
动作的底层逻辑就是基于服务和话题来实现的。
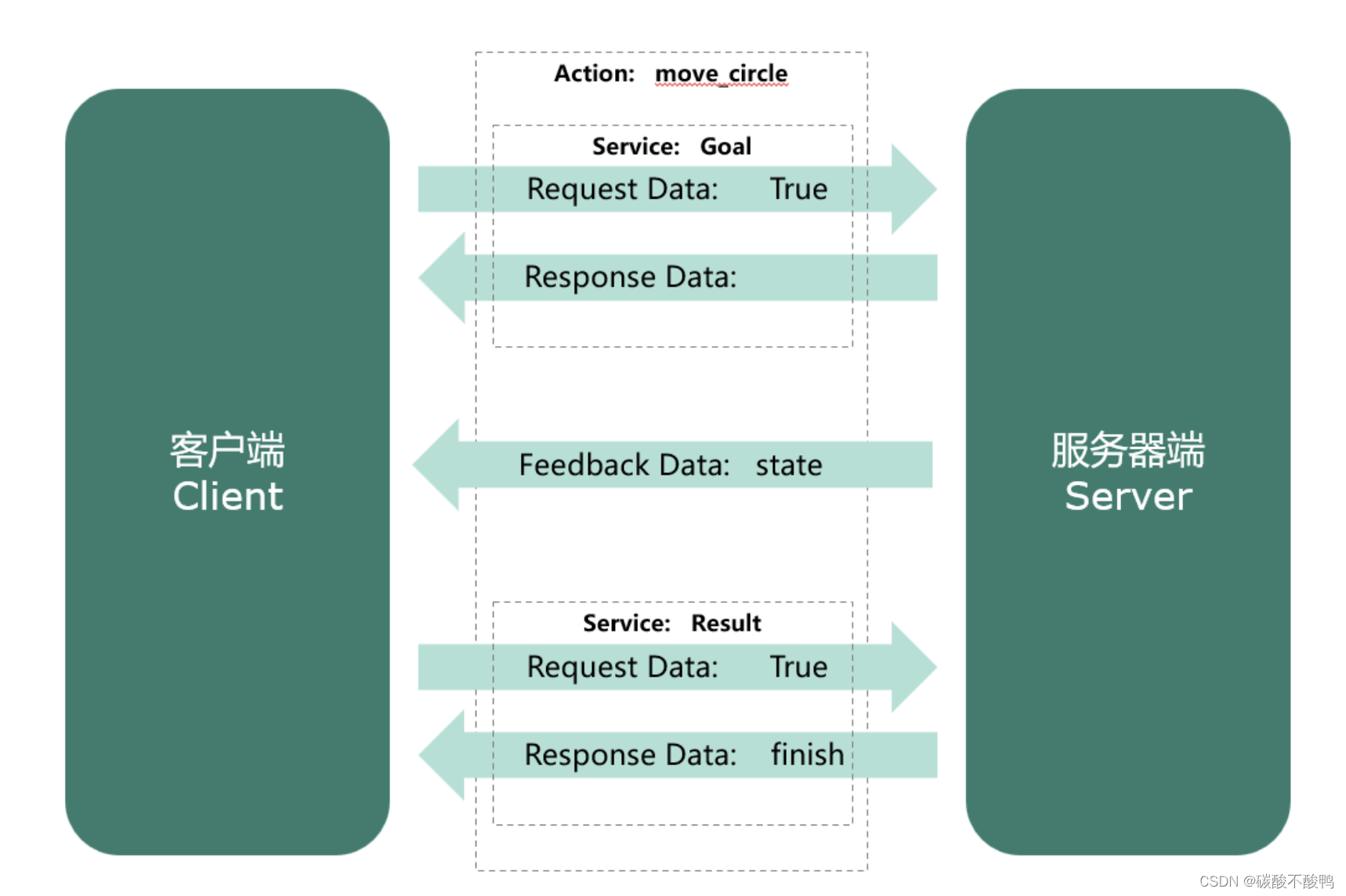
客户端发送一个运动的目标,想让机器人动起来,服务器端收到之后,就开始控制机器人运动,一边运动,一边反馈当前的状态,如果是一个导航动作,这个反馈可能是当前所处的坐标,如果是机械臂抓取,这个反馈可能又是机械臂的实时姿态。当运动执行结束后,服务器再反馈一个动作结束的信息。整个通信过程就此结束。
由2服务和1话题合成
动作的三个通信模块,有两个是服务,一个是话题,当客户端发送运动目标时,使用的是服务的请求调用,服务器端也会反馈一个应带,表示收到命令。动作的反馈过程,其实就是一个话题的周期发布,服务器端是发布者,客户端是订阅者。所以说动作(接口数据类型)是服务(接口数据类型)和话题(接口数据类型)封装而成的新的数据结构。
案例–机器人画圆:
假设我们有一个机器人,我们希望通过动作的通信方法,让机器人转个圈,请编程实现动作通信中,客户端和服务器端的实现过程。
运行效果:
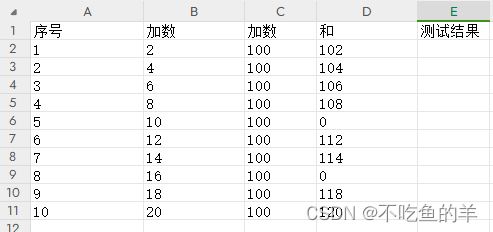
启动两个终端,分别运行一下命令,启动动作示例的服务端和客户端:
$ ros2 run learning_action action_move_server
$ ros2 run learning_action action_move_client
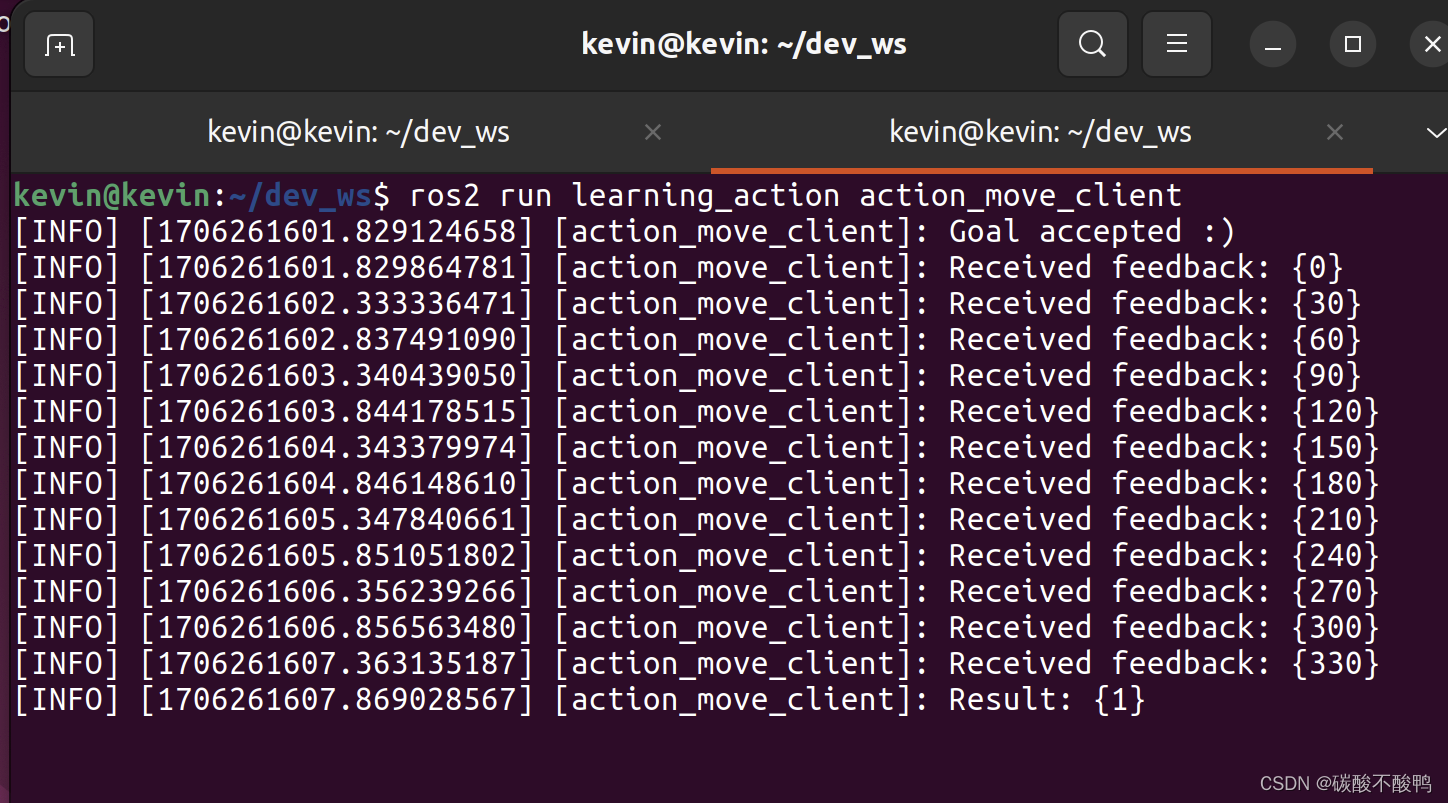

终端中,我们可以看到客户端发送动作目标之后,服务器端开始模拟机器人运动,每30度发送一次反馈信息,最终完成运动({Result==1}),并反馈结束运动的信息。
1.1.1.案例接口定义:
ROS2标准接口定义一般是Goal、Result、Feedback。

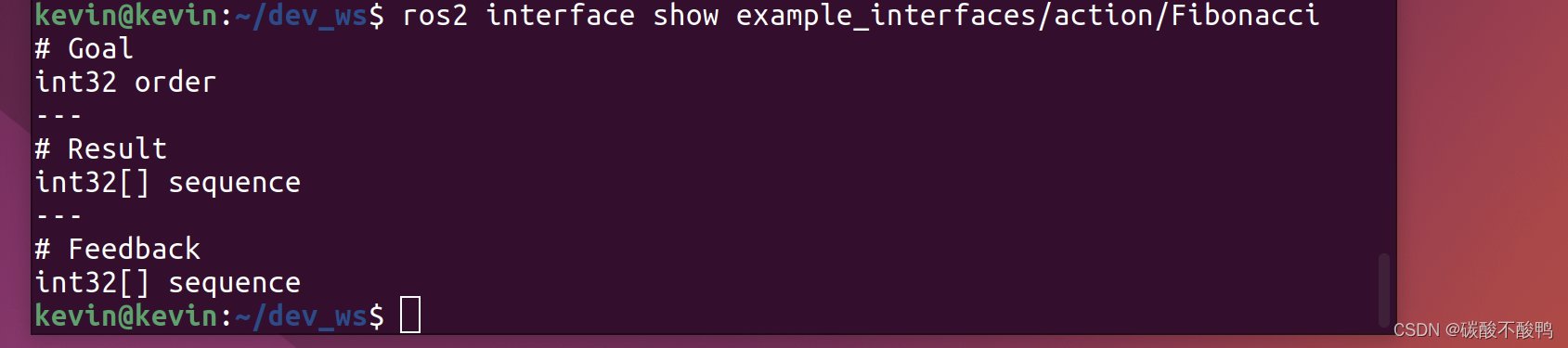
我找了一会儿但并没有直接找到能够使用的ROS2标准接口定义。仅找到了一个斐波那契示例的接口,上述的机器人画圆案例明显不能使用现成的接口,于是我们只好自定义如下:learning_interface/action/MoveCircle.action
bool enable # 定义动作的目标,表示动作开始的指令
---
bool finish # 定义动作的结果,表示是否成功执行
---
int32 state # 定义动作的反馈,表示当前执行到的位置
包含三个部分:
第一块是动作的目标,enable为true时,表示开始运动;
第二块是动作的执行结果,finish为true,表示动作执行完成;
第三块是动作的周期反馈,表示当前机器人旋转到的角度。
完成定义后,还需要在功能包的CMakeLists.txt中配置编译选项,让编译器在编译过程中,根据接口定义,自动生成不同语言的代码:
...
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME} "action/MoveCircle.action"
)
...
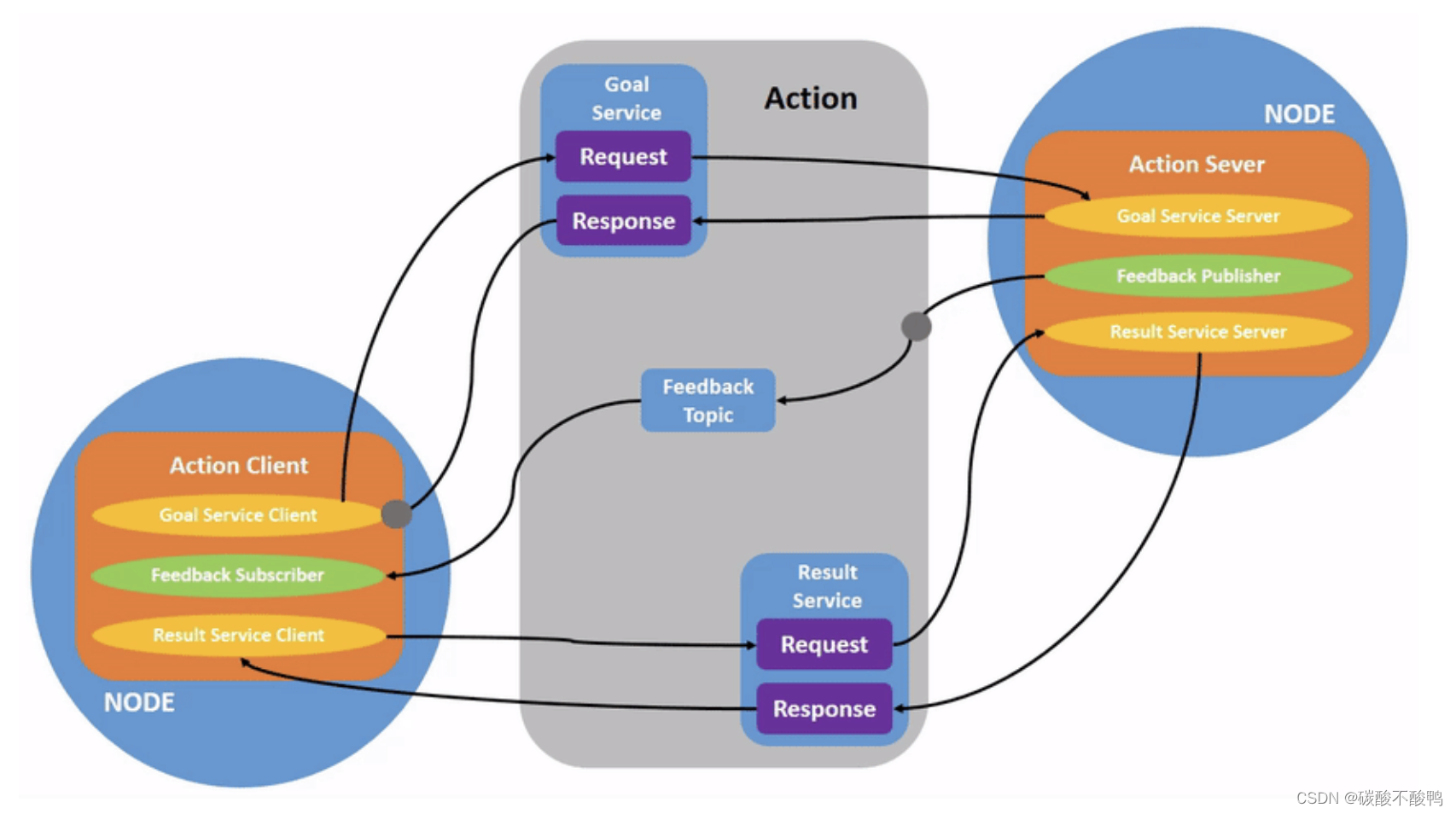
1.1.2.案例通信模型:
通信模型就是这样,客户端发送给一个动作目标,服务器控制机器人开始运动,并周期反馈,结束后反馈结束信息。
1.1.3.服务器端代码:
import time
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from rclpy.action import ActionServer # ROS2 动作服务器类
from learning_interface.action import MoveCircle # 自定义的圆周运动接口
class MoveCircleActionServer(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self._action_server = ActionServer( # 创建动作服务器(接口类型、动作名、回调函数)
self,
MoveCircle,
'move_circle',
self.execute_callback)
def execute_callback(self, goal_handle): # 执行收到动作目标之后的处理函数
self.get_logger().info('Moving circle...')
feedback_msg = MoveCircle.Feedback() # 创建一个动作反馈信息的消息
for i in range(0, 360, 30): # 从0到360度,执行圆周运动,并周期反馈信息
feedback_msg.state = i # 创建反馈信息,表示当前执行到的角度
self.get_logger().info('Publishing feedback: %d' % feedback_msg.state)
goal_handle.publish_feedback(feedback_msg) # 发布反馈信息
time.sleep(0.5)
goal_handle.succeed() # 动作执行成功
result = MoveCircle.Result() # 创建结果消息
result.finish = True
return result # 反馈最终动作执行的结果
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = MoveCircleActionServer("action_move_server") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
完成代码的编写后需要设置功能包的编译选项,让系统知道Python程序的入口,打开功能包的setup.py文件,加入如下入口点的配置:
entry_points={
'console_scripts': [
'action_move_server = learning_action.action_move_server:main',
],
},
注意:格式为触发程序(节点)名(最好和节点名一致)= 功能包.节点py源代码文件名:main
1.1.4.客户端源代码:
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from rclpy.action import ActionClient # ROS2 动作客户端类
from learning_interface.action import MoveCircle # 自定义的圆周运动接口
class MoveCircleActionClient(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self._action_client = ActionClient( # 创建动作客户端(接口类型、动作名)
self, MoveCircle, 'move_circle')
def send_goal(self, enable): # 创建一个发送动作目标的函数
goal_msg = MoveCircle.Goal() # 创建一个动作目标的消息
goal_msg.enable = enable # 设置动作目标为使能,希望机器人开始运动
self._action_client.wait_for_server() # 等待动作的服务器端启动
self._send_goal_future = self._action_client.send_goal_async( # 异步方式发送动作的目标
goal_msg, # 动作目标
feedback_callback=self.feedback_callback) # 处理周期反馈消息的回调函数
self._send_goal_future.add_done_callback(self.goal_response_callback) # 设置一个服务器收到目标之后反馈时的回调函数
def goal_response_callback(self, future): # 创建一个服务器收到目标之后反馈时的回调函数
goal_handle = future.result() # 接收动作的结果
if not goal_handle.accepted: # 如果动作被拒绝执行
self.get_logger().info('Goal rejected :(')
return
self.get_logger().info('Goal accepted :)') # 动作被顺利执行
self._get_result_future = goal_handle.get_result_async() # 异步获取动作最终执行的结果反馈
self._get_result_future.add_done_callback(self.get_result_callback) # 设置一个收到最终结果的回调函数
def get_result_callback(self, future): # 创建一个收到最终结果的回调函数
result = future.result().result # 读取动作执行的结果
self.get_logger().info('Result: {%d}' % result.finish) # 日志输出执行结果
def feedback_callback(self, feedback_msg): # 创建处理周期反馈消息的回调函数
feedback = feedback_msg.feedback # 读取反馈的数据
self.get_logger().info('Received feedback: {%d}' % feedback.state)
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = MoveCircleActionClient("action_move_client") # 创建ROS2节点对象并进行初始化
node.send_goal(True) # 发送动作目标
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
完成代码的编写后需要设置功能包的编译选项,让系统知道Python程序的入口,打开功能包的setup.py文件,加入如下入口点的配置:
entry_points={
'console_scripts': [
'action_move_client = learning_action.action_move_client:main',
'action_move_server = learning_action.action_move_server:main',
],
},
1.1.5.动作命令行操作:
动作的常用命令行操作如下:
$ ros2 action list # 查看服务列表
$ ros2 action info <action_name> # 查看服务数据类型
$ ros2 action send_goal <action_name> <action_type> <action_data> # 发送服务请求
1.2.参数:
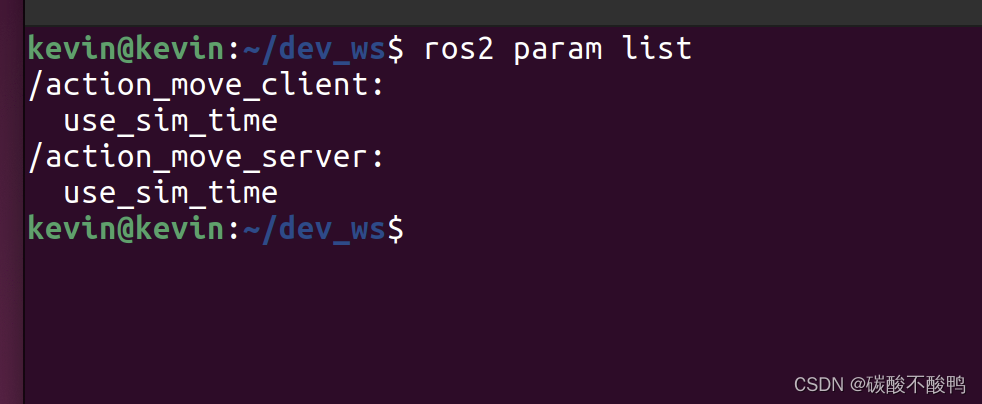
1.2.1.查看参数列表:
$ ros2 param list
1.2.2.参数查询与修改:
如果想要查询或者修改某个参数的值,可以在param命令后边跟get或者set子命令:
$ ros2 param describe action_move_client use_sim_time # 查看某个参数的描述信息!
$ ros2 param get action_move_client use_sim_time # 查询某个参数的值
$ ros2 param set action_move_client use_sim_time True # 修改某个参数的值


1.2.3.参数文件保存与加载:
$ ros2 param dump turtlesim >> turtlesim.yaml # 将某个节点的参数保存到参数文件中
$ ros2 param load turtlesim turtlesim.yaml # 一次性加载某一个文件中的所有参数
2.本方向外学习内容:
2.1.Java SE类和对象:
OOP(面向对象)类型的语言主要依靠对象的交互完成一件事情。我们不用关注具体的实现过程,只需要找准对象,理清对象之间的交互关系即可。
面向过程: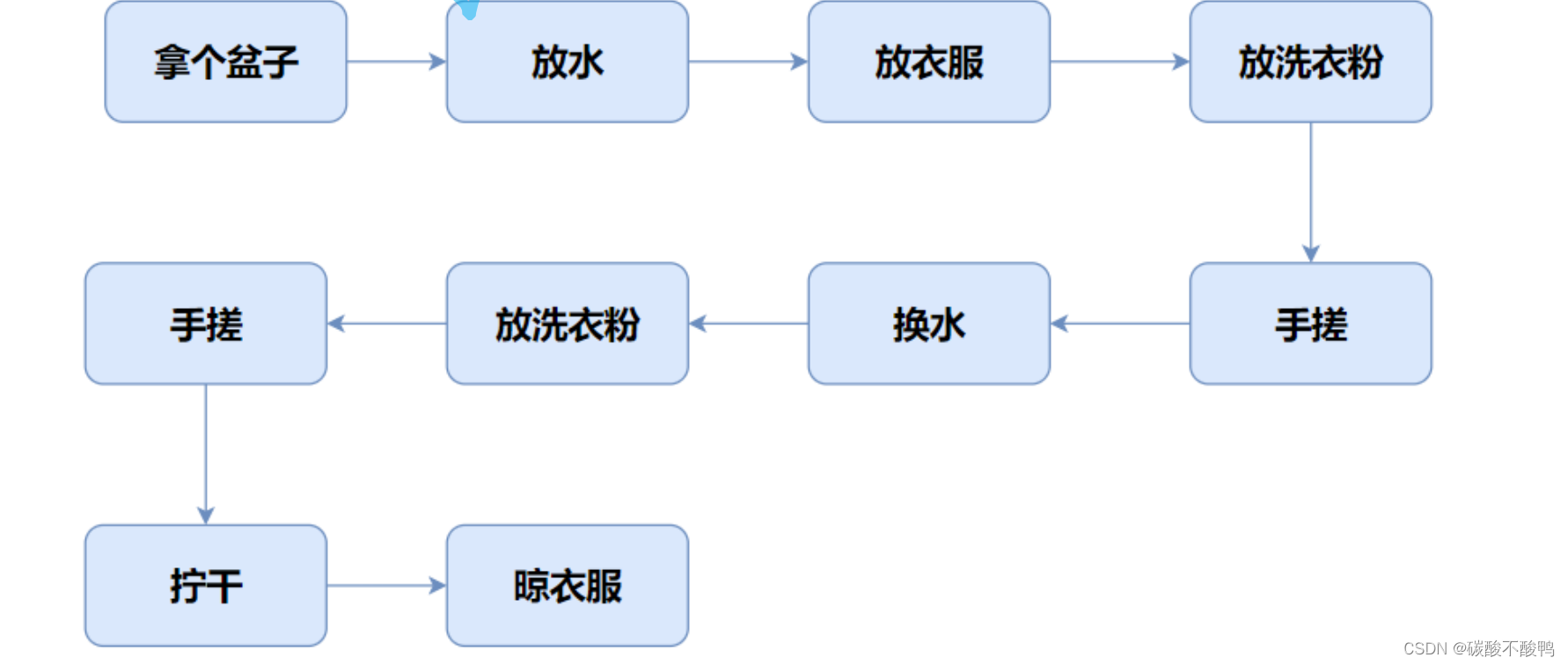
传统的方式:注重的是洗衣服的过程,少了一个环节可能都不行。
面向对象:
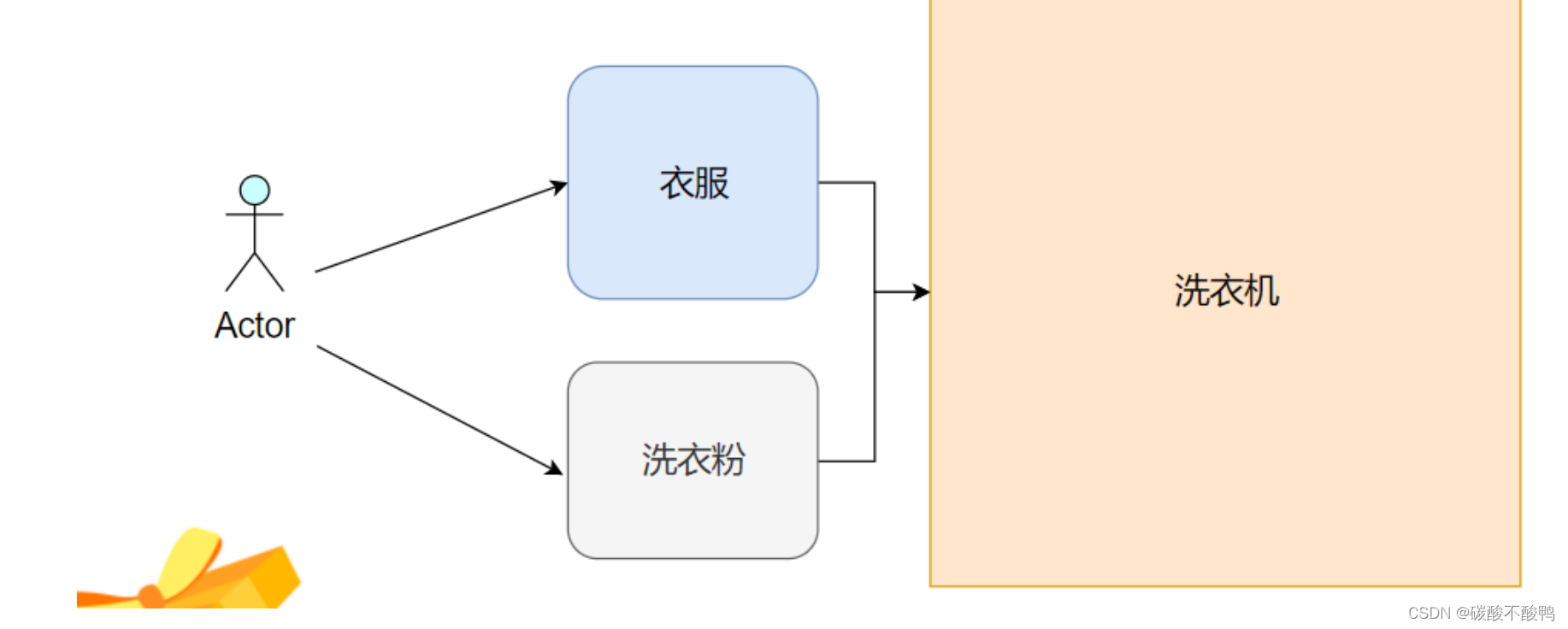
以面向对象方式来进行处理,就不关注洗衣服的过程,具体洗衣机是怎么来洗衣服,如何来甩干的,用户不用去关心,只需要将衣服放进洗衣机,倒入洗衣粉,启动开关即可,通过对象之间的交互来完成的。
注意:面向过程和面相对象并不是一门语言,而是解决问题的方法,没有那个好坏之分,都有其专门的应用场景。
2.1.1.类定义和使用:
类是用来对一个实体(对象)来进行描述的,主要描述该实体(对象)具有哪些属性(外观尺寸等),哪些功能(用来干
啥),描述完成后计算机就可以识别了。
比如:洗衣机,它是一个品牌,在Java中可以将其看成是一个类别。
属性:产品品牌,型号,产品重量,外观尺寸,颜色…
功能:洗衣,烘干、定时…
类的定义格式:
// 创建类
class ClassName{
field; // 字段(属性) 或者 成员变量
method; // 行为 或者 成员方法
}
class为定义类的关键字,ClassName为类的名字,{}中为类的主体。
类中包含的内容称为类的成员。属性主要是用来描述类的,称之为类的成员属性或者类成员变量。方法主要说明类具有哪些功能,称为类的成员方法。
class WashMachine{
public String brand; // 品牌
public String type; // 型号
public double weight; // 重量
public double length; // 长
public double width; // 宽
public double height; // 高
public String color; // 颜色
public void washClothes(){
// 洗衣服
System.out.println("洗衣功能");
}
public void dryClothes(){
// 脱水
System.out.println("脱水功能");
}
public void setTime(){
// 定时
System.out.println("定时功能");
}
}
采用Java语言将洗衣机类在计算机中定义完成,经过javac编译之后形成.class文件,在JVM的基础上计算机就可以识别了。
注意事项
- 一般一个文件当中只定义一个类
- main方法所在的类一般要使用public修饰(注意:Eclipse默认会在public修饰的类中找main方法)
- public修饰的类必须要和文件名相同
- 不要轻易去修改public修饰的类的名称,如果要修改,通过开发工具修改。
类名注意采用大驼峰定义。
2.1.2.类的实例化:
定义了一个类,就相当于在计算机中定义了一种新的类型,与int,double类似,只不过int和double是java语言自带的内置类型,而类是用户自定义了一个新的类型,比如:PetDog类和Student类。它们都是类(一种新定义的类型)有了这些自定义的类型之后,就可以使用这些类来定义实例(或者称为对象)。
用类类型创建对象的过程,称为类的实例化,在java中采用new关键字,配合类名来实例化对象。
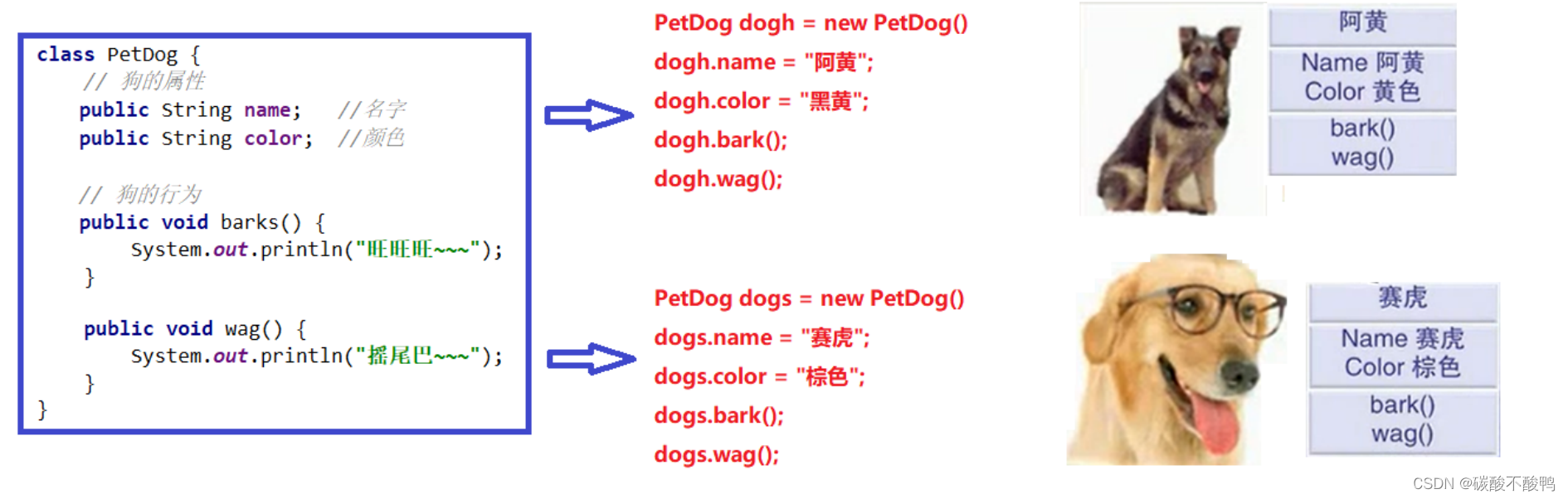
注意事项:
1.new 关键字用于创建一个对象的实例.
2.使用 . 来访问对象中的属性和方法.
3.同一个类可以创建对个实例.
this引用:
为什么要有this引用?
public class Date {
public int year;
public int month;
public int day;
public void setDay(int y, int m, int d){
year = y;
month = m;
day = d;
}
public void printDate(){
System.out.println(year + "/" + month + "/" + day);
}
public static void main(String[] args) {
// 构造三个日期类型的对象 d1 d2 d3
Date d1 = new Date();
Date d2 = new Date();
Date d3 = new Date();
// 对d1,d2,d3的日期设置
d1.setDay(2020,9,15);
d2.setDay(2020,9,16);
d3.setDay(2020,9,17);
// 打印日期中的内容
d1.printDate();
d2.printDate();
d3.printDate();
}
}
以上代码定义了一个日期类,然后main方法中创建了三个对象,并通过Date类中的成员方法对对象进行设置和打
印,代码整体逻辑非常简单,没有任何问题。
但是细思之下有以下两个疑问:
1. 形参名不小心与成员变量名相同:
public void setDay(int year, int month, int day){
year = year;
month = month;
day = day;
}
- 三个对象都在调用setDate和printDate函数,但是这两个函数中没有任何有关对象的说明,setDate和
printDate函数如何知道打印的是那个对象的数据呢?
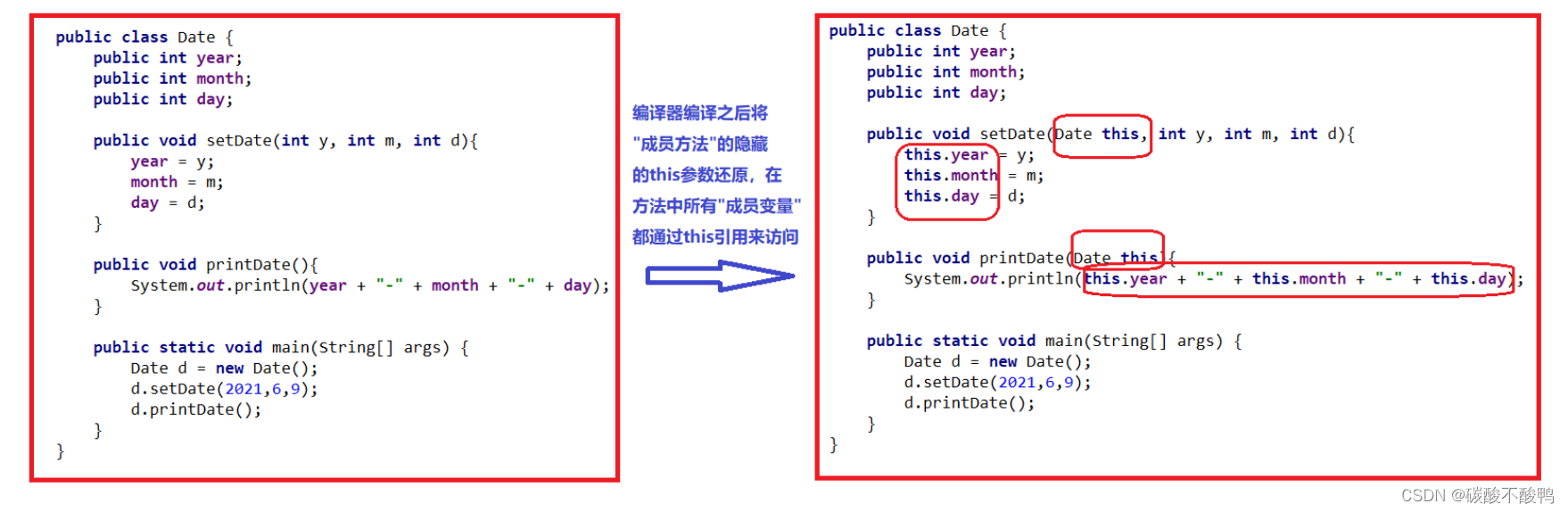
什么是this引用?
this引用指向当前对象(成员方法运行时调用该成员方法的对象),在成员方法中所有成员变量的操作,都是通过该引用去访问。只不过所有的操作对用户是透明的,即用户不需要来传递,编译器自动完成。
public class Date {
public int year;
public int month;
public int day;
public void setDay(int year, int month, int day){
this.year = year;
this.month = month;
this.day = day;
}
public void printDate(){
System.out.println(this.year + "/" + this.month + "/" + this.day);
}
}
this引用的特性:
- this的类型:对应类类型引用,即哪个对象调用就是哪个对象的引用类型。
- this只能在"成员方法"中使用。
- 在"成员方法"中,this只能引用当前对象,不能再引用其他对象。
- this是“成员方法”第一个隐藏的参数,编译器会自动传递,在成员方法执行时,编译器会负责将调用成员方法
对象的引用传递给该成员方法,this负责来接收。
2.1.3.对象的构造及初始化:
通过前面知识点的学习得知,在Java方法内部定义一个局部变量时,必须要初始化,否则会编译失败。
2.1.3.1.构造方法:
构造方法(也称为构造器)是一个特殊的成员方法,名字必须与类名相同,在创建对象时,由编译器自动调用,并且在整个对象的生命周期内只调用一次
public class Date {
public int year;
public int month;
public int day;
// 构造方法:
// 名字与类名相同,没有返回值类型,设置为void也不行
// 一般情况下使用public修饰
// 在创建对象时由编译器自动调用,并且在对象的生命周期内只调用一次
public Date(int year, int month, int day){
this.year = year;
this.month = month;
this.day = day;
System.out.println("Date(int,int,int)方法被调用了");
}
public void printDate(){
System.out.println(year + "-" + month + "-" + day);
}
public static void main(String[] args) {
// 此处创建了一个Date类型的对象,并没有显式调用构造方法
Date d = new Date(2021,6,9); // 输出Date(int,int,int)方法被调用了
d.printDate(); // 2021-6-9
}
}
特性:
- 名字必须与类名相同。
- 没有返回值类型,设置为void也不行。
- 创建对象时由编译器自动调用,并且在对象的生命周期内只调用一次(相当于人的出生,每个人只能出生一次)
- 构造方法可以重载(用户根据自己的需求提供不同参数的构造方法)
- 如果用户没有显式定义,编译器会生成一份默认的构造方法,生成的默认构造方法一定是无参的。
public class Date {
public int year;
public int month;
public int day;
public void printDate(){
System.out.println(year + "-" + month + "-" + day);
}
public static void main(String[] args) {
Date d = new Date();
d.printDate();
}
}
上述Date类中,没有定义任何构造方法,编译器会默认生成一个不带参数的构造方法。
注意:一旦用户定义,编译器则不再生成。
- 构造方法中,可以通过this调用其他构造方法来简化代码
public class Date {
public int year;
public int month;
public int day;
// 无参构造方法--内部给各个成员赋值初始值,该部分功能与三个参数的构造方法重复
// 此处可以在无参构造方法中通过this调用带有三个参数的构造方法
// 但是this(1900,1,1);必须是构造方法中第一条语句
public Date(){
//System.out.println(year); 注释取消掉,编译会失败
this(1900, 1, 1);
//this.year = 1900;
//this.month = 1;
//this.day = 1;
}
// 带有三个参数的构造方法
public Date(int year, int month, int day) {
this.year = year;
this.month = month;
this.day = day;
}
}
注意:
this(…)必须是构造方法中第一条语句
2.1.4.封装:
面向对象程序三大特性:封装、继承、多态。而类和对象阶段,主要研究的就是封装特性。何为封装呢?简单来说就是套壳屏蔽细节。
Java中主要通过类和访问权限来实现封装:类可以将数据以及封装数据的方法结合在一起,更符合人类对事物的认知,而访问权限用来控制方法或者字段能否直接在类外使用。Java中提供了四种访问限定符:
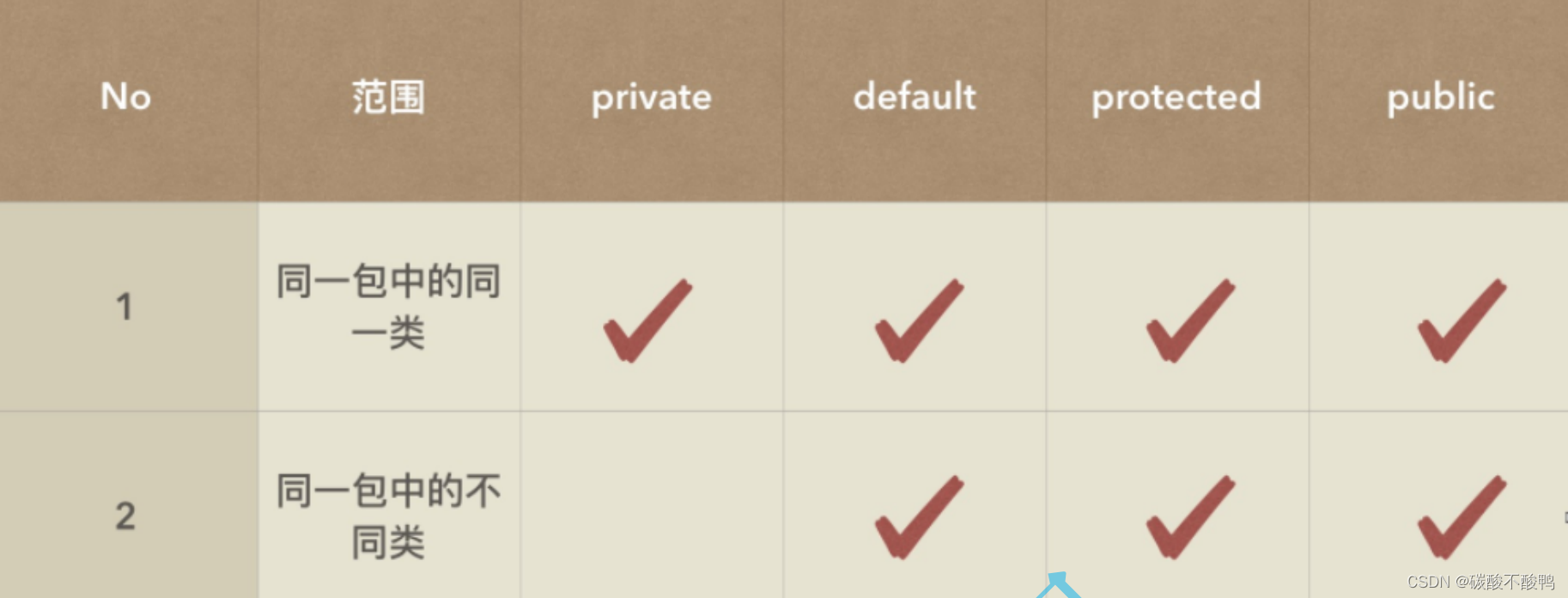
比如:
public:可以理解为一个人的外貌特征,谁都可以看得到
protected:主要是用在继承中,继承部分详细介绍
default(默认): 对于自己家族中(同一个包中)不是什么秘密,对于其他人来说就是隐私了
private:只有自己知道,其他人都不知道
public class Computer {
private String cpu; // cpu
private String memory; // 内存
public String screen; // 屏幕
String brand; // 品牌---->default属性
public Computer(String brand, String cpu, String memory, String screen) {
this.brand = brand;
this.cpu = cpu;
this.memory = memory;
this.screen = screen;
}
public void Boot(){
System.out.println("开机~~~");
}
public void PowerOff(){
System.out.println("关机~~~");
}
public void SurfInternet(){
System.out.println("上网~~~");
}
}
public class TestComputer {
public static void main(String[] args) {
Computer p = new Computer("HW", "i7", "8G", "13*14");
System.out.println(p.brand); // default属性:只能被本包中类访问
System.out.println(p.screen); // public属性: 可以任何其他类访问
// System.out.println(p.cpu); // private属性:只能在Computer类中访问,不能被其他类访问
}
}
注意:一般情况下成员变量设置为private,成员方法设置为public。
2.1.5.包:
在面向对象体系中,提出了一个软件包的概念,即:为了更好的管理类,把多个类收集在一起成为一组,称为软件包。有点类似于目录,与Ros中的功能包。比如:为了更好的管理电脑中的歌曲,一种好的方式就是将相同属性的歌曲放在相同文件下,也可以对某个文件夹下的音乐进行更详细的分类。
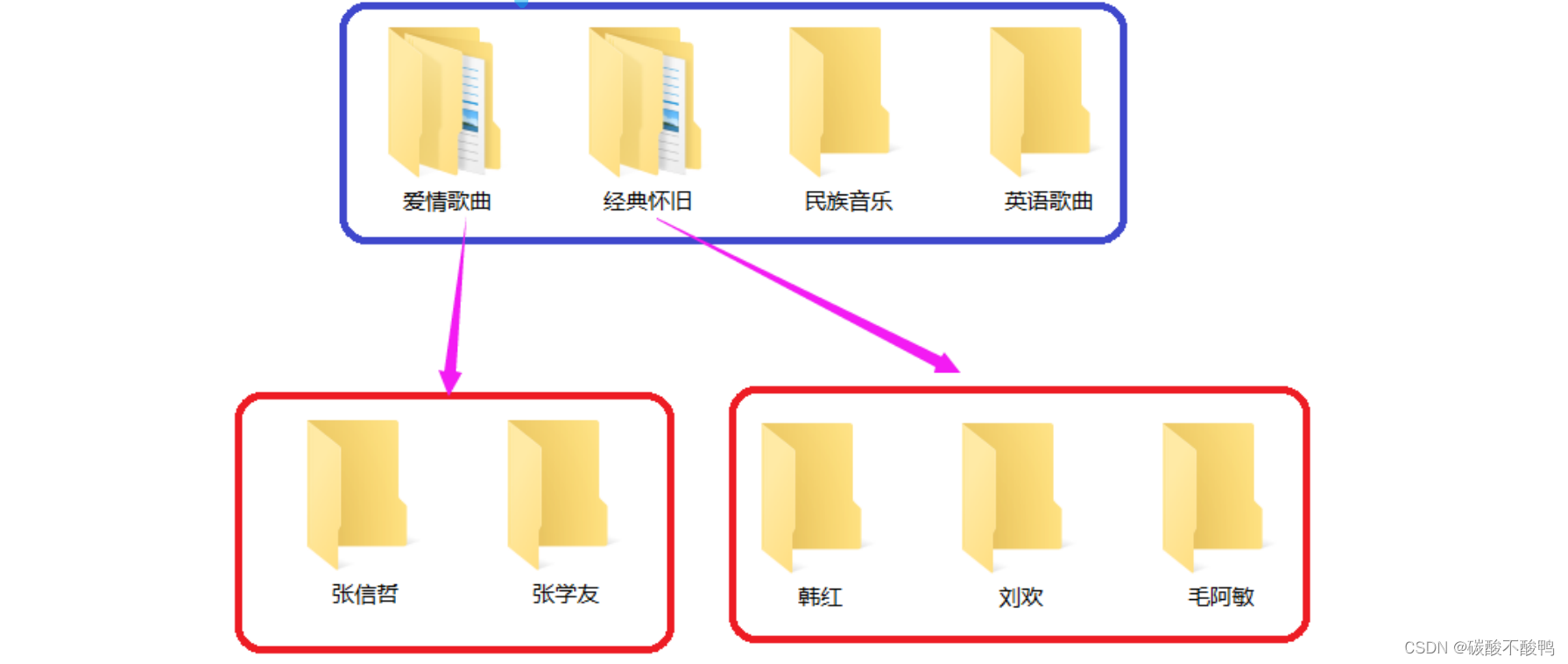
在Java中也引入了包,包是对类、接口等的封装机制的体现,是一种对类或者接口等的很好的组织方式,比如:一个包中的类不想被其他包中的类使用。包还有一个重要的作用:在同一个工程中允许存在相同名称的类,只要处在不同的包中即可。
简单来说:许多类放在一个包(packag)中,类是文件,类的上级目录就是包(文件夹),而许多包又可以进行分类和整合。(上面说的同一包是指和该类并列的类的集合的最小目录(文件夹/包))。
比如:Test.java是文件 ,com.test是文件夹。文件要放在文件夹内。com.test.Test.java才是一个文件的绝对地址。
建议显式的指定要导入的类名. 否则容易出现冲突的情况.
在这种情况下需要使用完整的类名:
import java.util.*;
import java.sql.*;
public class Test {
public static void main(String[] args) {
java.util.Date date = new java.util.Date();
System.out.println(date.getTime());
}
}
可以使用import static导入包中静态的方法和字段:
import static java.lang.Math.*;
public class Test {
public static void main(String[] args) {
double x = 30;
double y = 40;
// 静态导入的方式写起来更方便一些.
// double result = Math.sqrt(Math.pow(x, 2) + Math.pow(y, 2));
double result = sqrt(pow(x, 2) + pow(y, 2));
System.out.println(result);
}
}
2.1.5.1.自定义包:
基本规则:
在文件的最上方加上一个 package 语句指定该代码在哪个包中.
包名需要尽量指定成唯一的名字,通常会用公司的域名的颠倒形式(例如 :com.hel.demo1).
包名要和代码路径相匹配. 例如创建com.hel.demo1的包, 那么会存在一个对应的路径com/hel/demo1来存储代码.
如果一个类没有 package 语句, 则该类被放到一个默认包中
操作步骤:
- 在 IDEA 中先新建一个包: 右键 src -> 新建 -> 包:
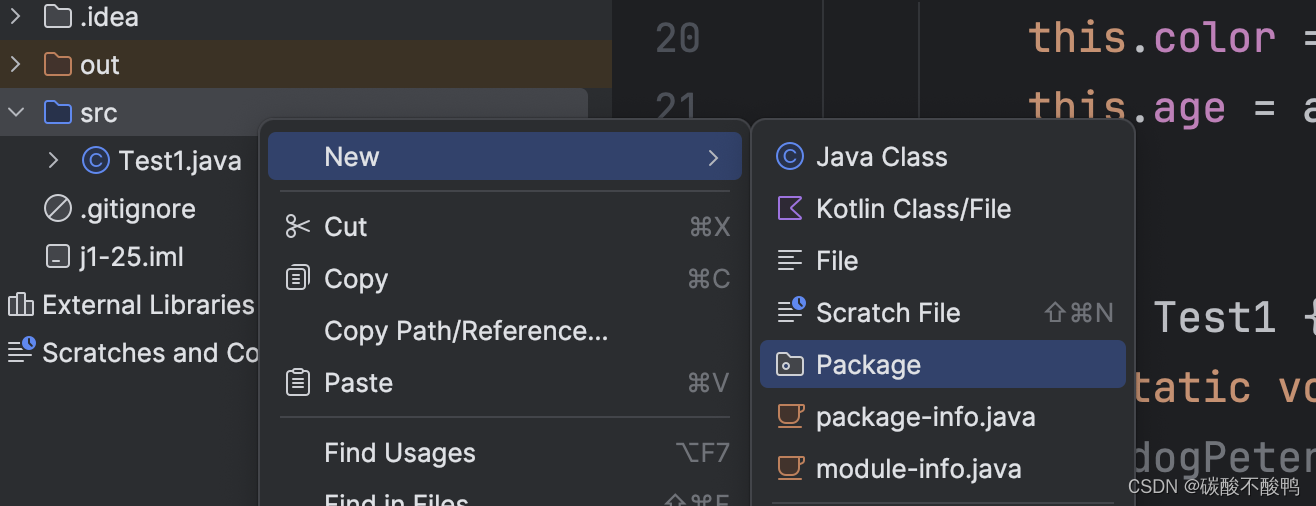
- 在弹出的对话框中输入包名, 例如
com.hel.demo1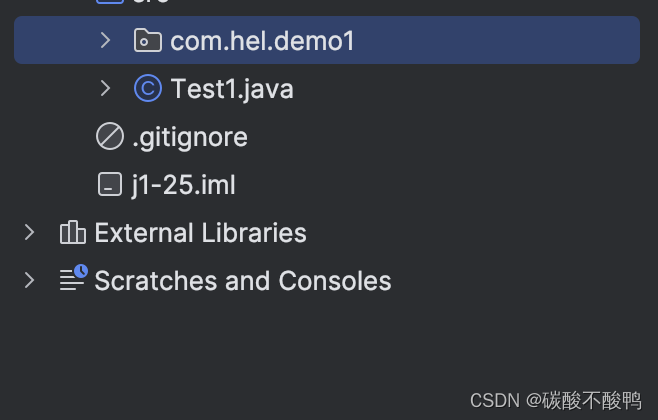
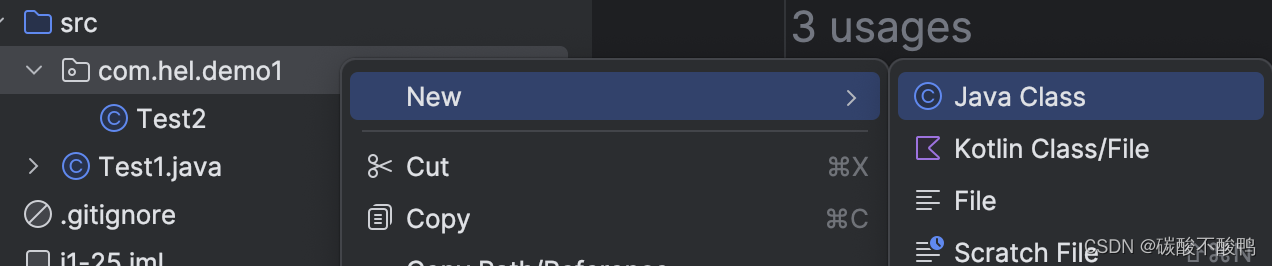
- 在包中创建类, 右键包名 -> 新建 -> 类, 然后输入类名即可.
2.1.6.static:
static修饰的成员变量,称为静态成员变量,静态成员变量最大的特性:不属于某个具体的对象,是所有对象所共享的。
【静态成员变量特性】
- 不属于某个具体的对象,是类的属性,所有对象共享的,不存储在某个对象的空间中
- 既可以通过对象访问,也可以通过类名访问,但一般更推荐使用类名访问
- 类变量存储在方法区当中
- 生命周期伴随类的一生(即:随类的加载而创建,随类的卸载而销毁)
Java中,被static修饰的成员方法称为静态成员方法,是类的方法,不是某个对象所特有的。静态成员一般是通过静态方法来访问的。
【静态方法特性】
- 不属于某个具体的对象,是类方法
- 可以通过对象调用,也可以通过类名
.静态方法名(…)方式调用,更推荐使用后者 - 不能在静态方法中访问任何非静态成员变量
- 静态方法中不能调用任何非静态方法,因为非静态方法有
this参数,在静态方法中调用时候无法传递this引用