装修屋子,找了一段墙面布线槽,外槽宽度只有23毫米,截取一段长为24厘米,尝试做个苗条小车


先在线槽上安装了二只N20小电机

装上二个快餐盒盖做轮子

测试一下使用3.7V锂电池的动力系统(视频)
https://v.youku.com/v_show/id_XNTEyNTM2NDcyOA==.html?spm=a2hcb.playlsit.page.1
苗条小车的动态图


准备使用连轴器,测试各种形态的轮子

内部的测试电池

小电机是拆机二手的,主要是共享单车,摩拜的电子锁电机


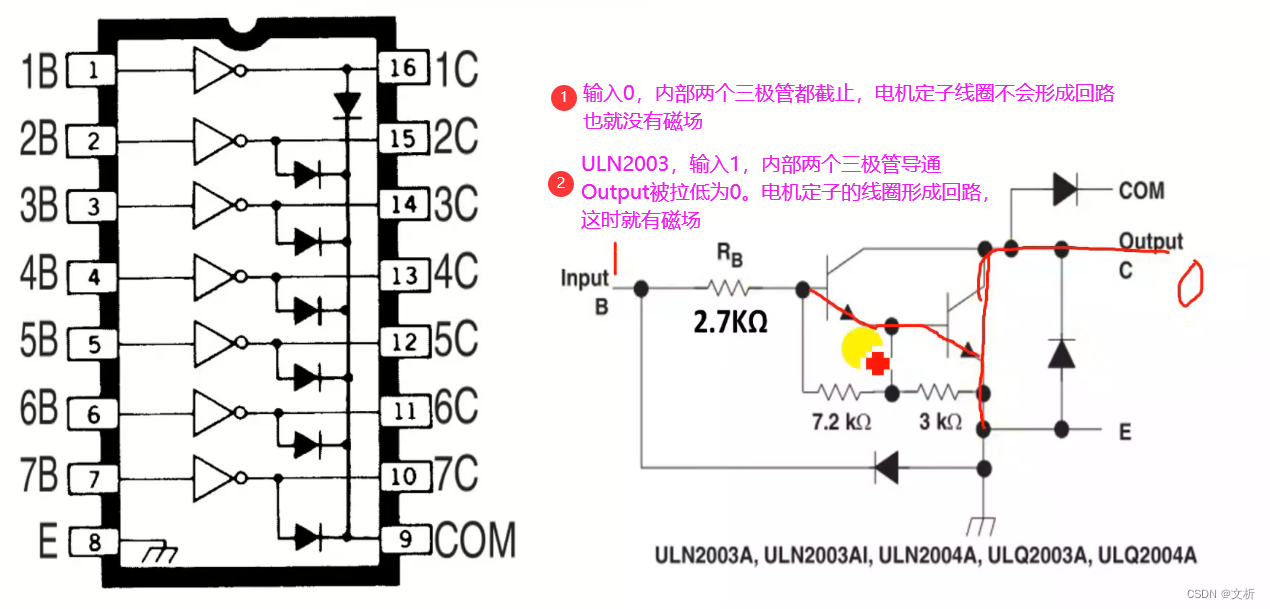
电机驱动使用MX1508双路电机驱动模块

还有DRV8833双路电机驱动模块

MX1508双路电机驱动模块接线示意图

尝试使用语言控制


实验视频
人工智能ASR PRO语音识别控制的纤细小车
使用麦克纳姆轮

【花雕动手做】实验五十三:语音控制摩拜小电机的纤细机器人测试平台
实验开源代码
#include "asr.h"
extern "C"{
void * __dso_handle = 0 ;}
#include "setup.h"
#include "myLib/asr_event.h"
uint32_t snid;
//{ID:250,keyword:"命令词",ASR:"最大音量",ASRTO:"音量调整到最大"}
//{ID:251,keyword:"命令词",ASR:"中等音量",ASRTO:"音量调整到中等"}
//{ID:252,keyword:"命令词",ASR:"最小音量",ASRTO:"音量调整到最小"}
//{speak:小蝶-清新女声,vol:20,speed:10,platform:haohaodada}
//{playid:10001,voice:欢迎使用人工智能AI助手,用小龟小车唤醒我。}
//{playid:10002,voice:我退下了,用小龟小车唤醒我}
void sys_power_on_hook(void){
vol_set(7);
}
void ASR_CODE()
{
//{ID:500,keyword:"唤醒词",ASR:"小龟小车",ASRTO:"我在呢"}
if(snid == 500){
}
//{ID:501,keyword:"唤醒词",ASR:"小龟",ASRTO:"我在呢"}
if(snid == 501){
}
//{ID:502,keyword:"唤醒词",ASR:"小车",ASRTO:"我在呢"}
if(snid == 502){
}
//{ID:503,keyword:"命令词",ASR:"前进",ASRTO:"开走喽"}
if(snid == 503){
digital_write(2,1);
digital_write(3,0);
digital_write(5,0);
digital_write(6,1);
}
//{ID:504,keyword:"命令词",ASR:"后退",ASRTO:"注意,我倒车啦"}
if(snid == 504){
digital_write(2,0);
digital_write(3,1);
digital_write(5,1);
digital_write(6,0);
}
//{ID:505,keyword:"命令词",ASR:"刹车",ASRTO:"好的,我停下"}
if(snid == 505){
digital_write(2,1);
digital_write(3,1);
digital_write(5,1);
digital_write(6,1);
}
//{ID:506,keyword:"命令词",ASR:"右转",ASRTO:"行,我右拐弯了"}
if(snid == 506){
digital_write(2,1);
digital_write(3,0);
digital_write(5,1);
digital_write(6,0);
}
//{ID:507,keyword:"命令词",ASR:"左转",ASRTO:"是,向左拐弯"}
if(snid == 507){
digital_write(2,0);
digital_write(3,1);
digital_write(5,0);
digital_write(6,1);
}
//{ID:508,keyword:"命令词",ASR:"别开了",ASRTO:"好的,我停下"}
if(snid == 508){
digital_write(2,1);
digital_write(3,1);
digital_write(5,1);
digital_write(6,1);
}
set_state_enter_wakeup(15000);
}
void setup()
{
digital_write(0, 0);
set_gpio_input(1);
digital_write(2, 0);
digital_write(3, 0);
set_gpio_input(4);
digital_write(5, 0);
digital_write(6, 0);
set_gpio_input(13);
set_gpio_input(14);
set_gpio_input(20);
}
生成模型与编译烧录


实验记录视频
ASR PRO离线语音的苗条小车
最小轮子的ASR PRO离线语音苗条小车