AUTOSAR网络管理做了几个项目了,但发现还是有些理解不够深入的地方,最近趁着有个新项目也要做AUTOSAR网络管理,再从头梳理一下AUTOSAR网络管理,预计用2-3篇文章,把AUTOSAR网络重新梳理完成。
这是第一篇,主要从如下三部分展开描述:
1)AUTOSAR网络管理的基础知识;
2)AUTOSAR网络管理主要涉及的软件模块及相关技术文档;
3)AUTOSAR网络管理的工作状态机;
1、网络管理基础知识介绍
车载网络管理常见的有如下两种:
1) OSEK网络管理:几年前基本都是用OSEK网络管理。但它相对AUTOSAR网络管理来讲比较复杂,要建环啥的,所以现在慢慢用得少了。
2) AUTOSAR网络管理:目前新开发的项目,大部分用的是AUTOSAR 网络管理。
本文主要介绍AUTOSAR网络管理。
网络管理主要是为了协调整车的各ECU的CAN网络同醒同睡。
即:
1、当网络上没有信息交互时,CAN网络将进入睡眠模式,之后本身的系统才允许进行休眠。
2、当ECU要需要获取CAN上的信息时,则该ECU唤醒CAN网络。
总结一句话,网络管理主要负责CAN网络的休眠唤醒,以达到本ECU以及整车的休眠唤醒。
AUTOSAR网络管理可以适用于多种网络,如CAN/LIN/Eth/FlexRay等。
本文主要针对CAN部分展开描述,也是目前市场上使用得最多的,最实用的。
2、主要涉及模块及相关文档
从AUTOSAR规范上来看,主要涉及两个模块CanNM,NM模块。
从源码层面来看,主要涉及如下源代码:
Nm.c (src\components\nm\implementation)
Nm.h (src\components\nm\implementation)
CanNm.c (src\components\cannm\implementation)
CanNm.h(src\components\cannm\implementation)
ComM_Nm.h (src\components\comm\implementation)
Nm_Cbk.h (src\components\nm\implementation)
NmStack_Types.h (src\components\nm\implementation)
BswM_Nm.h (src\components\bswm\implementation)
CanNm_Cbk.h (src\components\cannm\implementation)
Nm_Cfg.c(src\gendata)
Nm_Cfg.h (src\gendata)
Nm_Lcfg.c (src\gendata)
SchM_Nm.h(src\gendata)
CanNm_Cfg.c (src\gendata)
CanNm_Cfg.h(src\gendata)
CanNm_Lcfg.c (src\gendata)
CanNm_PBcfg.c(src\gendata)
SchM_CanNm.h (src\gendata)
SchM_Nm_Type.h(src\gendata)
SchM_CanNm_Type.h(src\gendata)
对应相关的AUTOSAR标准为:
1) AUTOSAR_SWS_CANNetworkManagement.pdf
2) AUTOSAR_SRS_NetworkManagement.pdf
3) AUTOSAR_SWS_CANStateManager.pdf
对应相关的Vector开发技术规范为:
1) TechnicalReference_CanNm.pdf
2) TechnicalReference_Nm.pdf
3、AUTOSAR CAN Nm状态机
3.1 网络管理三大模式介绍
AUTOSAR网络管理主要分为三大模式:
1) 网络模式(Network Mode)
2) 预睡眠模式(Prepare Bus-Sleep Mode)
3) 睡眠模式(Bus-Sleep Mode)
其中网络模式有三个状态:
1) 帧重复状态(Repeat Message State)
2) 正常运行状态(Normal Operation State)
3) 准备睡眠状态(Ready Sleep State)
其中帧重复状态又有两个子状态:
1) 快速发送子状态(Normal immediate State)
2) 正常发送子状态(Normal transmit State)
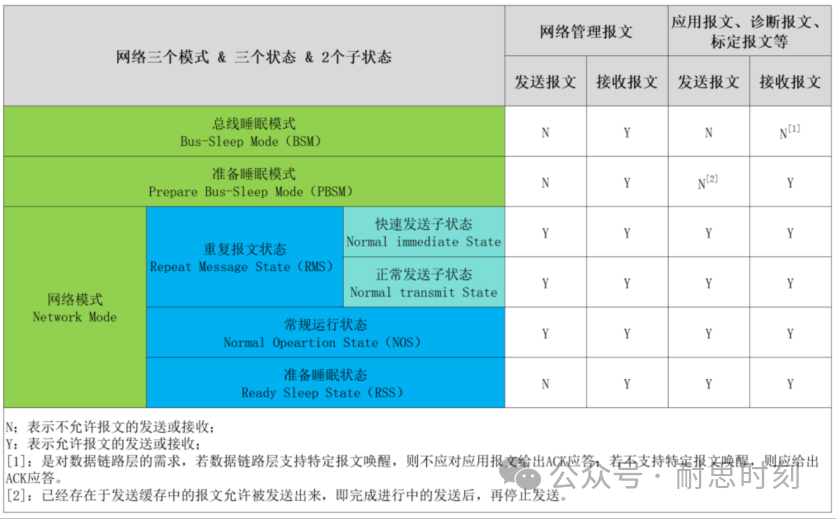
上面每个模式/状态,对网络管理报文、应用报文、诊断报文的发送/接收要求不一样。
具体如下:
1) 网络模式(Network Mode):
允许所有报文的发送与接收(除了处于准备睡眠状态Ready Sleep State时,不能发送网络管理报文)
2) 预睡眠模式(Prepare Bus-Sleep Mode):
不允许发送网络管理报文,
不允许发送、接收应用报文/诊断报文等(已经存储在Tx缓存器的应用报文/诊断报文,仍然可以发送)
仅可接收网络管理报文;
可以对总线上的报文进行ACK响应
3) 睡眠模式(Bus-Sleep Mode)
不允许发送网络管理报文,
不允许发送、接收应用报文/诊断报文等
仅可接收网络管理报文;
不可以对总线上的报文进行ACK响应
上面所有模式/状态,可整理成如下表:
具体这三个模式、三个状态、两个子状态,是怎么互相切换的?下面重点讲解下网络管理的状态机。
3.2 网络管理状态机
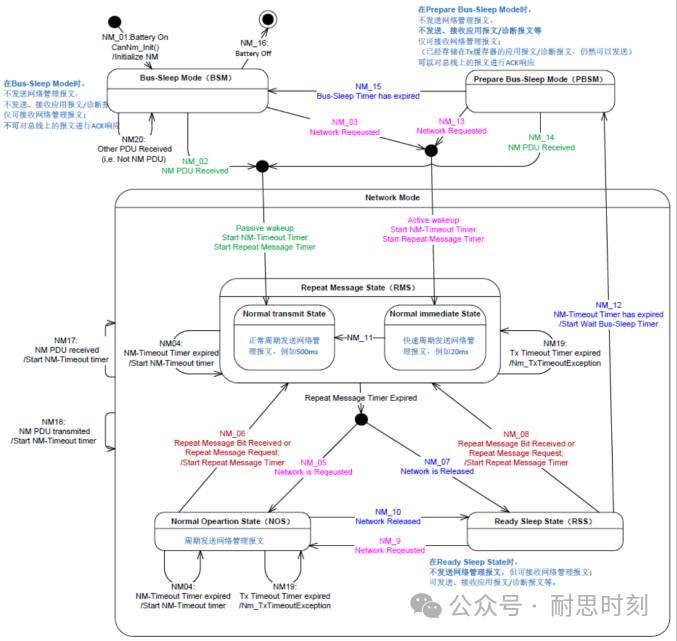
NM_01: 上电后,软件通过调用CanNm_Init() 完成CAN网络管理的初始化,之后进入网络休眠模式Bus-Sleep Mode(BSM)。
NM_02: 在网络休眠模式Bus-Sleep Mode(BSM)下,
若收到其他节点的NM PDU,则软件调用CanNm_PassiveStartup(),将状态机切换至网络模式的重复报文状态Repeat Message State(RMS),并进入其中的正常发送子状态。
NM_03: 在网络休眠模式Bus-Sleep Mode(BSM)下,
若本模块存在本地唤醒请求,则软件调用CanNm_NetworkRequest()将状态机切换至网络模式的重复报文状态Repeat Message State(RMS),并进入其中的快速发送子状态。
NM_04: 在网络模式下的重复报文状态Repeat Message State(RMS)或正常运行状态Normal Opeartion State(NOS)时,若NM-Timeout Timer超时,则重启NM-Timeout 定时器;
该步骤正常运行时,是不会触发的。分析如下:
当处于Repeat Message Stat状态时,正常情况下,在NM-Timeout Timer超时前,肯定会接收到其他NM PDU或本NM PDU发送完成,则会如NM17步骤,软件会重启NM-Timeout Timer。
NM_05: 当Repeat Message Timer超时,若此时本ECU仍需要请求网络,则进入正常运行状态Normal Operation State。
NM_06: 满足如下任一条件时,则从正常运行状态Normal Opeartion State(NOS)进入重复报文状态Repeat Message State;
1、接收到Repeat Message Bit置1的网络管理报文
2、本ECU需要置上Repeat Message Bit时,则软件调用CanNm_RepeatMessageRequest();
NM_07: 当Repeat Message Timer超时,若此时本ECU不再需要网络,则进入准备睡眠状态Ready Sleep State(RSS)。
NM_08: 满足如下任一条件时,则从准备休眠状态Ready Sleep State(RSS)进入重复报文状态Repeat Message State;
1、接收到Repeat Message Bit置1的网络管理报文
2、本ECU需要请求网络且需置上Repeat Message Bit时,则软件调用CanNm_RepeatMessageRequest();
NM_9: 当本ECU需要请求网络时,则软件调用CanNm_NetworkRequest(() ,请求进入Normal Operation State。
NM_10: 当本ECU不需要网络时,则软件调用CanNm_NetworkRelease() ,请求进入准备休眠状态Ready Sleep State(RSS):
NM_11: 当快速发送次数到达,但Repeat Message Timer计时未到达时, 则从Normal immediate State切换至Normal transmit State
NM_12: 在网络模式下的Ready Sleep State时,NM-Timeout Timer超时,则软件调用CanNm_NetworkRequest((),进入 预休眠状态Prepare Bus-Sleep Mode (PBSM);
NM_13: 在预休眠模式Prepare Bus-Sleep Mode(PBSM)下,
若本模块存在本地唤醒请求,则软件调用CanNm_NetworkRequest()将状态机切换至网络模式的重复报文状态Repeat Message State(RMS),并进入其中的快速发送子状态。
NM_14: 在预休眠模式Prepare Bus-Sleep Mode(BSM)下,
若收到其他节点的NM PDU,则软件调用CanNm_PassiveStartup(),将状态机切换至网络模式的重复报文状态Repeat Message State(RMS),并进入其中的正常发送子状态。
NM_15: Bus-Sleep Timer超时,则进入Bus-Sleep Mode,MCU进入休眠。
NM_16: 电源下电,退出网络管理。
NM_17: 在网络模式,若成功接收到一帧网络管理报文后,则重启NM-Timeout Timer定时器。
NM_18: 在网络模式,若成功发送一帧网络管理报文后,重启NM-Timeout Timer定时器。
NM_19: 在网络模式的Repeat Message State(RMS)或Normal Opeartion State(NOS),若持续Tx Timeout Timer未成功发送网络管理报文,则表示当前存在异常,需调用Nm_TxTimeoutException()进行异常处理。
NM_20: 若接收到非网络管理报文,则应该保持在Bus-Sleep状态。
4、总结
1)网络管理主要负责CAN网络的休眠唤醒,以达到本ECU以及整车的休眠唤醒
2)从AUTOSAR规范上来看,主要涉及两个软件模块CanNM,NM模块。
3)AUTOSAR网络管理总共有三个模式(网络模式/预休眠模式/休眠模式),其中网络模式里又有三个状态(重复报文状态/正常发送状态/准备休眠状态),另外重复报文状态里又有两个子状态(正常发送子状态/快速发送子状态)。具体详见下表:
![[<span style='color:red;'>AutoSar</span>]<span style='color:red;'>基础</span>部分 RTE <span style='color:red;'>01</span> 介绍](https://img-blog.csdnimg.cn/33a405d400ac47fabd94f961dbcb6eb1.png)
![[<span style='color:red;'>AutoSar</span>]<span style='color:red;'>基础</span>部分 RTE <span style='color:red;'>08</span> runnable mapping](https://img-blog.csdnimg.cn/direct/84382a3c560e435da5ef2b99dfe01bc8.png)