前言
💫你好,我是辰chen,本文旨在准备考研复试或就业
💫本文内容是我为复试准备的第二个项目
💫欢迎大家的关注,我的博客主要关注于考研408以及AIoT的内容
🌟 预置知识:基本Python语法,基本linux命令行使用
以下的几个专栏是本人比较满意的专栏(大部分专栏仍在持续更新),欢迎大家的关注:
💥ACM-ICPC算法汇总【基础篇】
💥ACM-ICPC算法汇总【提高篇】
💥AIoT(人工智能+物联网)
💥考研
💥CSP认证考试历年题解
项目介绍
- 从0构建完整机器人
- 实现机器人在环境中自主探索,绘制地图,识别并在地图上标记出指定物品位置,自主导航等功能
- 具有实时的交互和可视化
功能与技术简介
- ROS系统基础
通信框架 (Topic,Service)
TF树
常用工具
Rviz可视化 - 机器人仿真:
构建一个完整机器人,包括物理模型、运动学属性、传感器仿真、移动底盘等
物理模拟环境Gazebo与ROS和机器人的联通
手动控制机器人在仿真环境中的移动,包括实时的可视化与物理模拟,机器人可以自由发挥设计 - 激光雷达感知
在机器人上运行激光建图算法,对仿真环境建图。仿真环境可自由发挥设计 (类比玩《我的世界》)
可以探索不同的传感器组合与算法的建图效果,如轮速计+激光雷达、IMU+激光雷达、纯激光雷达等 - 机器人的导航规划:
用自动规划代替手动控制,实现机器人在环境下的自主探索,自主前往给定目标点,以及动态避障
探索多种全局规划算法与局部规划算法的效果
基于强化学习的规划控制。可将车辆的方向盘、油门、刹车直接交给强化学习算法控制,算法在仿真环境中从0自学开车,学会了变道、对它车的加减速避让和车道内避让等 - 深度学习目标检测入门:
深度学习CV的快速入门: 梯度下降、MLP、卷积运算等目标检测快速入门:经典二阶段方法、一阶段方法等YOLO算法的讲解与部署运行。YOLO算法是最知名的视觉目标检测算法之一,至今已发展到第8代,仍然非常活跃
硬件要求
- 内存>=8GB(实测应该是必须16GB才可以,8GB跑不动)
- 可用硬盘空间>80GB
- CPU 无硬性要求(配置过低仿真可能会卡)
- GPU 无硬性要求(有NVIDIA GPU更佳,深度学习可加速)
环境配置
仅Windows版:
【超级会员V6】通过百度网盘分享的文件:虚拟机镜像.z0…等5个文件
链接:https://pan.baidu.com/s/14cPS0P5FhwbCU0IyuVIICA?pwd=chen
提取码:chen
复制这段内容打开「百度网盘APP 即可获取」

虚拟机
下载安装VMware player,重启。

安装过程如下:






等待:

下载虚拟机文件,镜像文件有多个,请逐一下载,然后放到本地的同一个文件夹中

下载:



等待复制:


对虚拟机镜像.zip解压到当前文件夹下:



打开 VMware player,点击 Player >文件 > 打开,在弹出的窗口中,进入虚拟机镜像的解压文件夹,双击 Ubuntu20.@4-Qrobo.vmx 文件








密码为 a


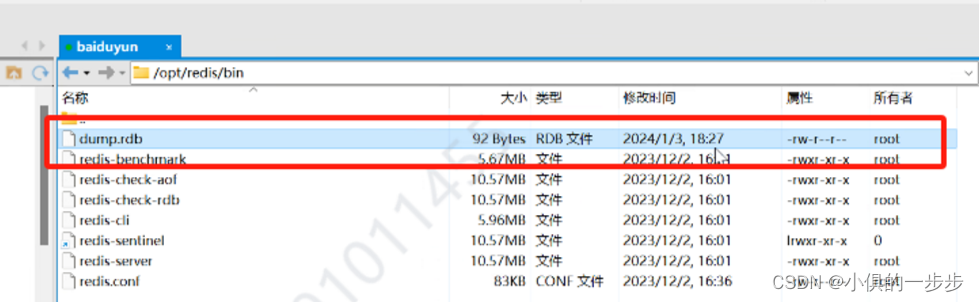
运行项目demo
虚拟机登录账户,qrobo 账户密码 a
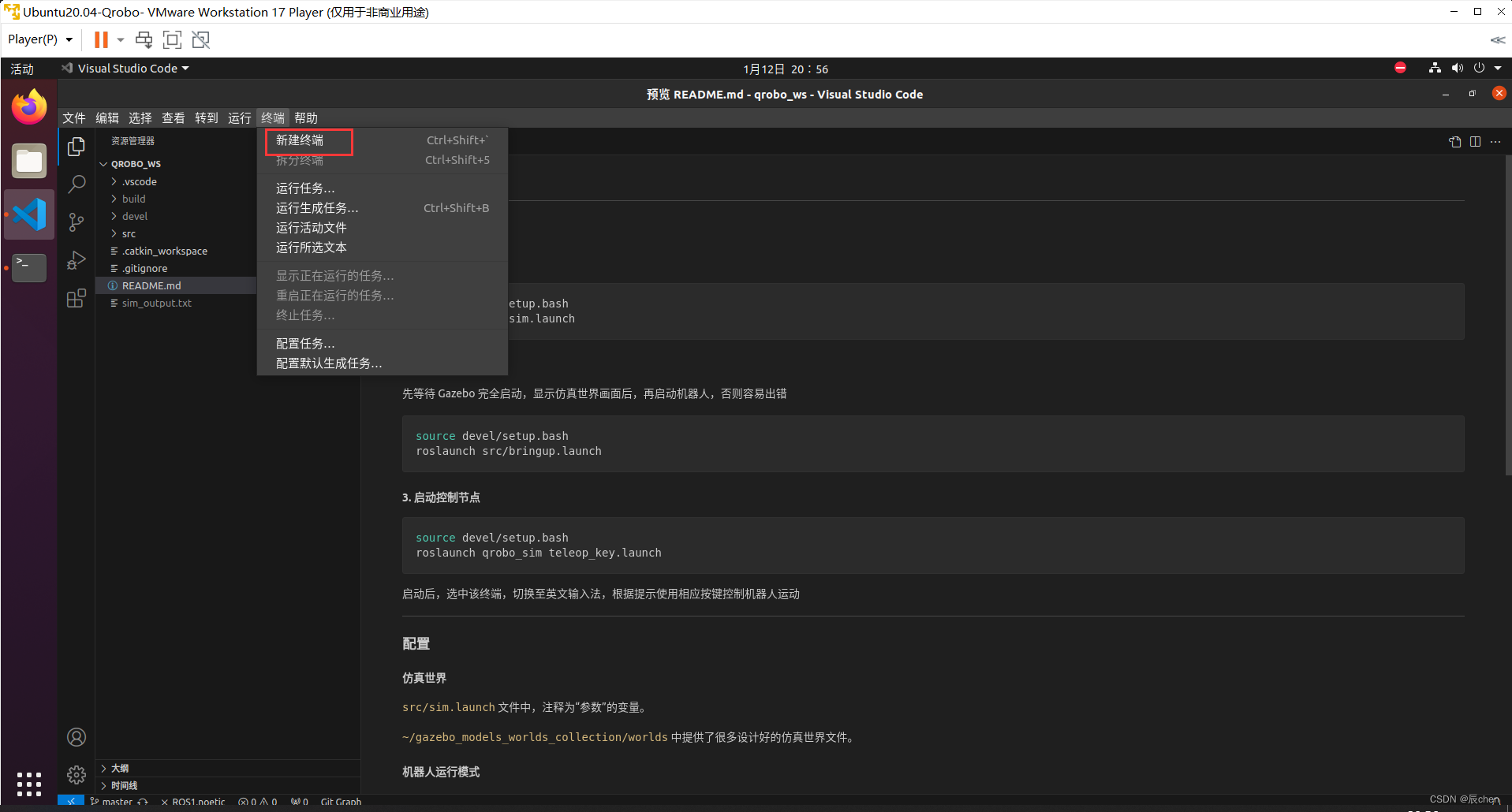
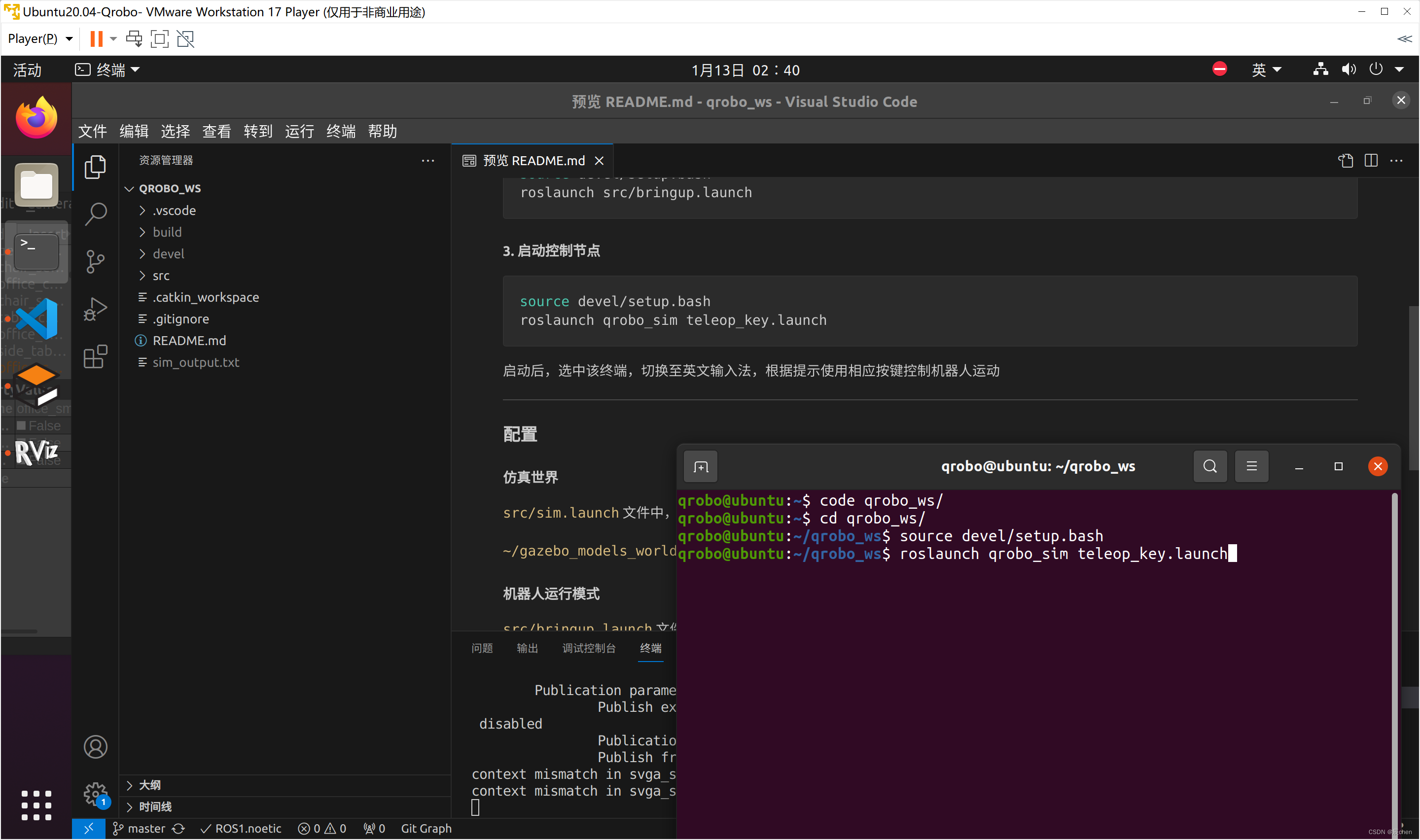
ctrl+Alt+T 打开终端,输入命令 (用VSCode 打开项目文件夹)
code qrobo ws/
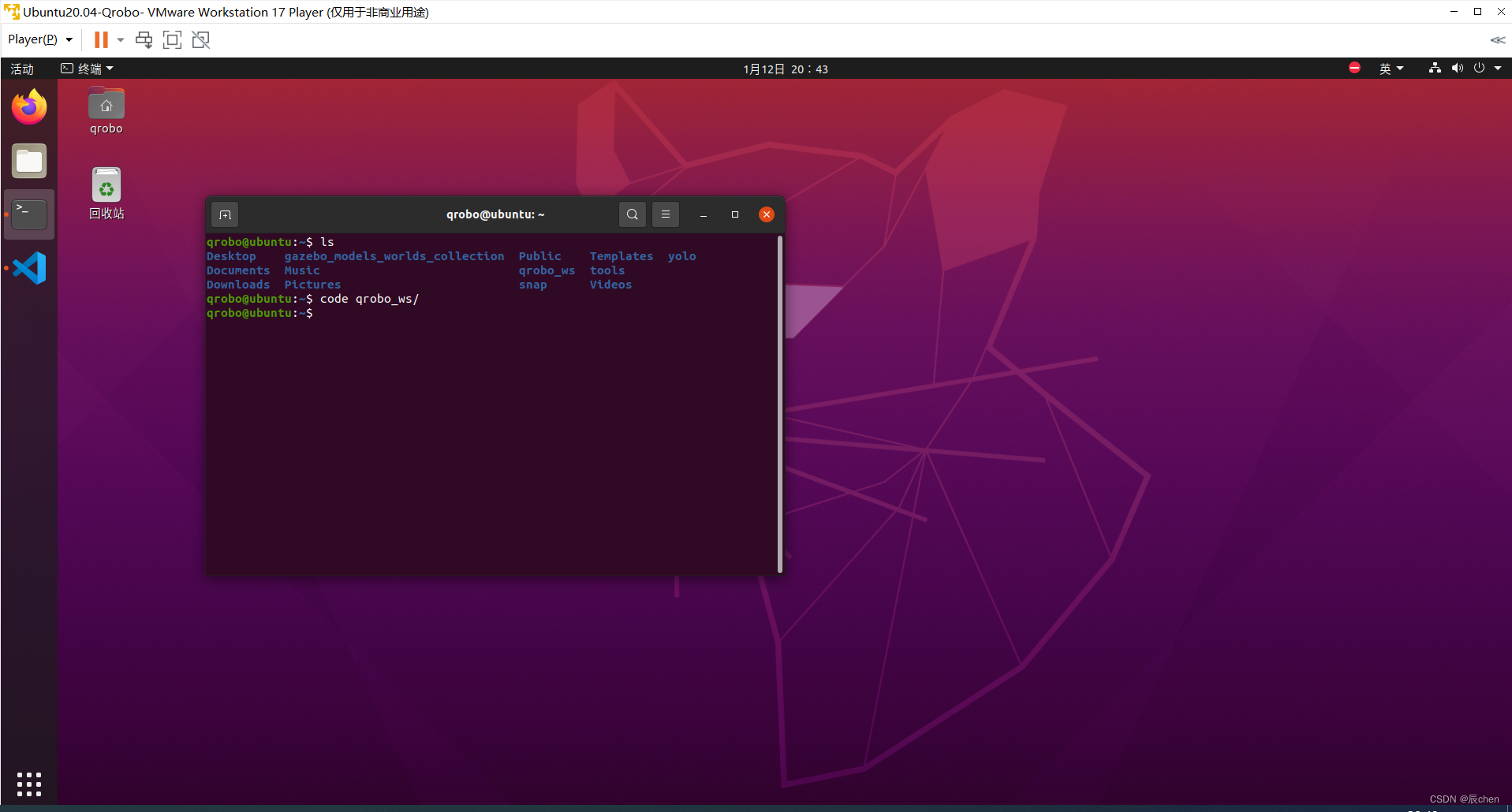
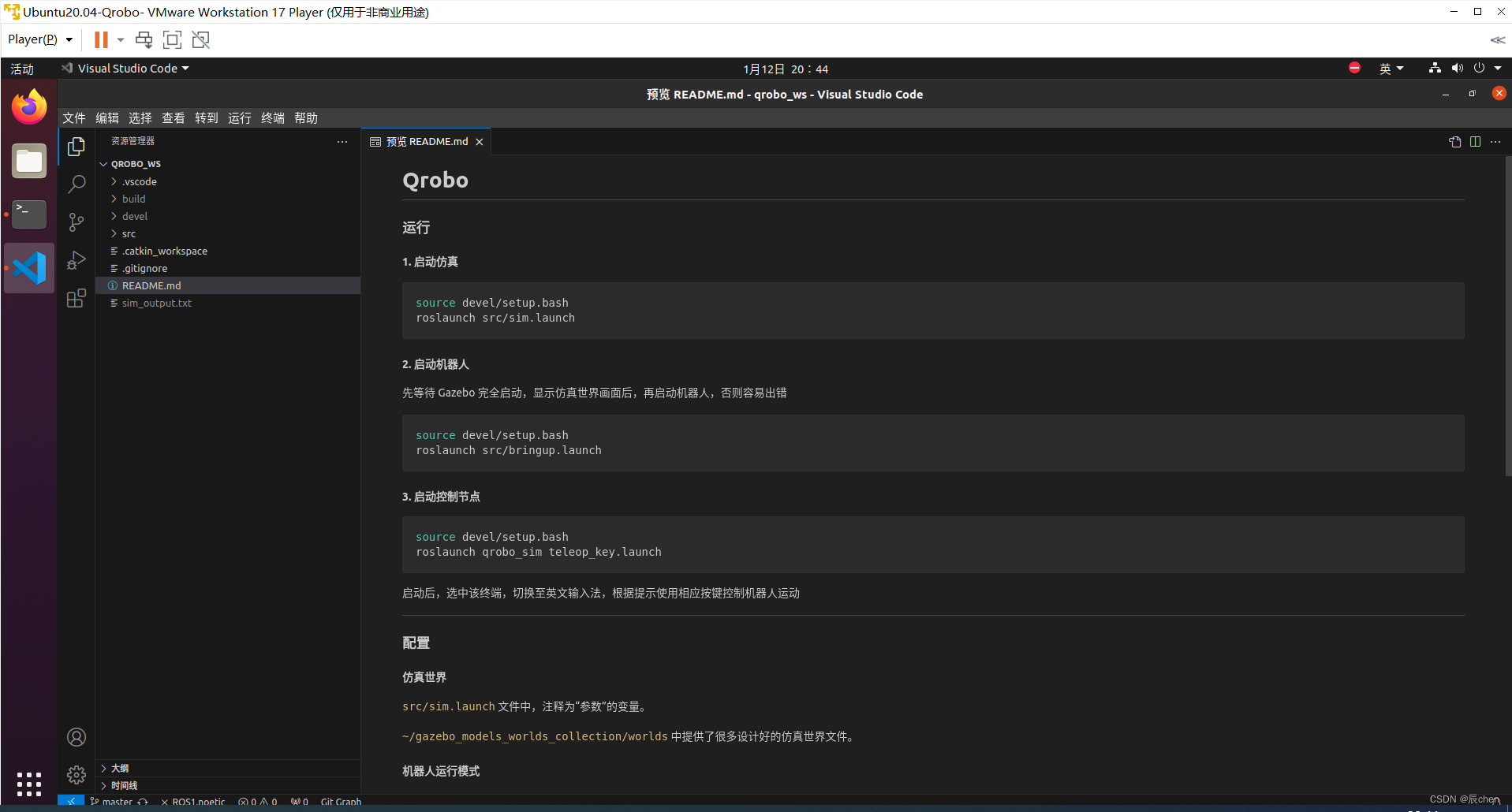
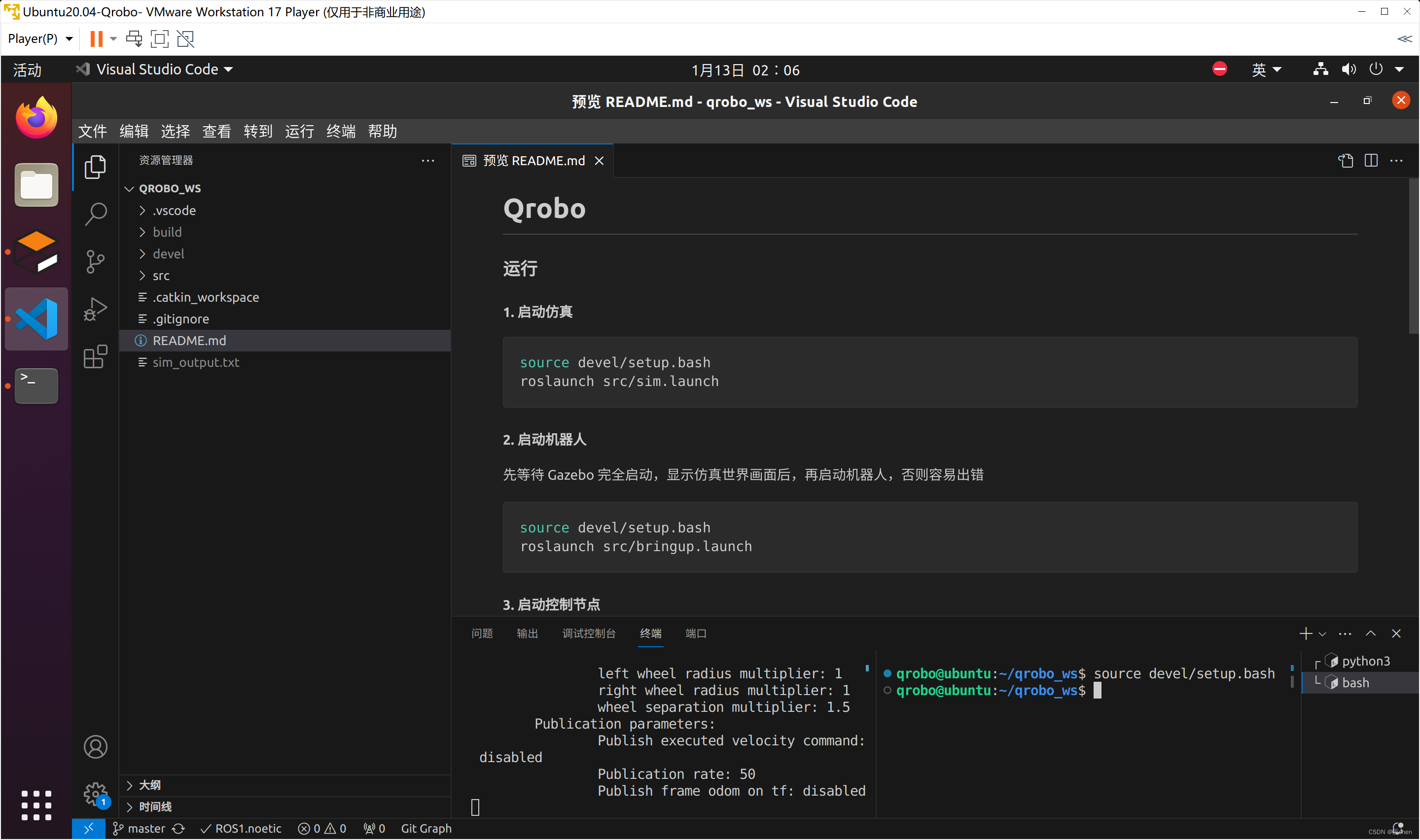
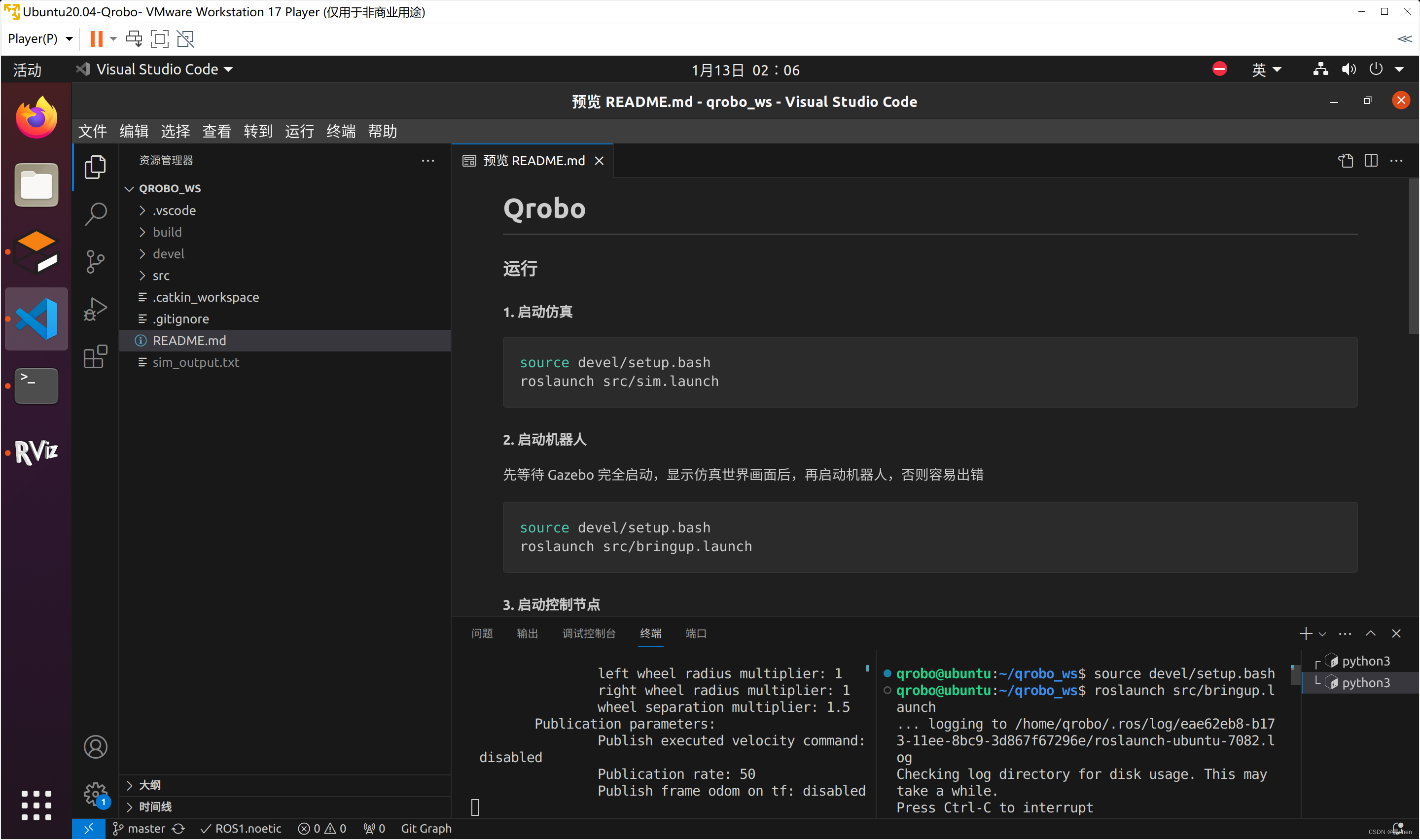
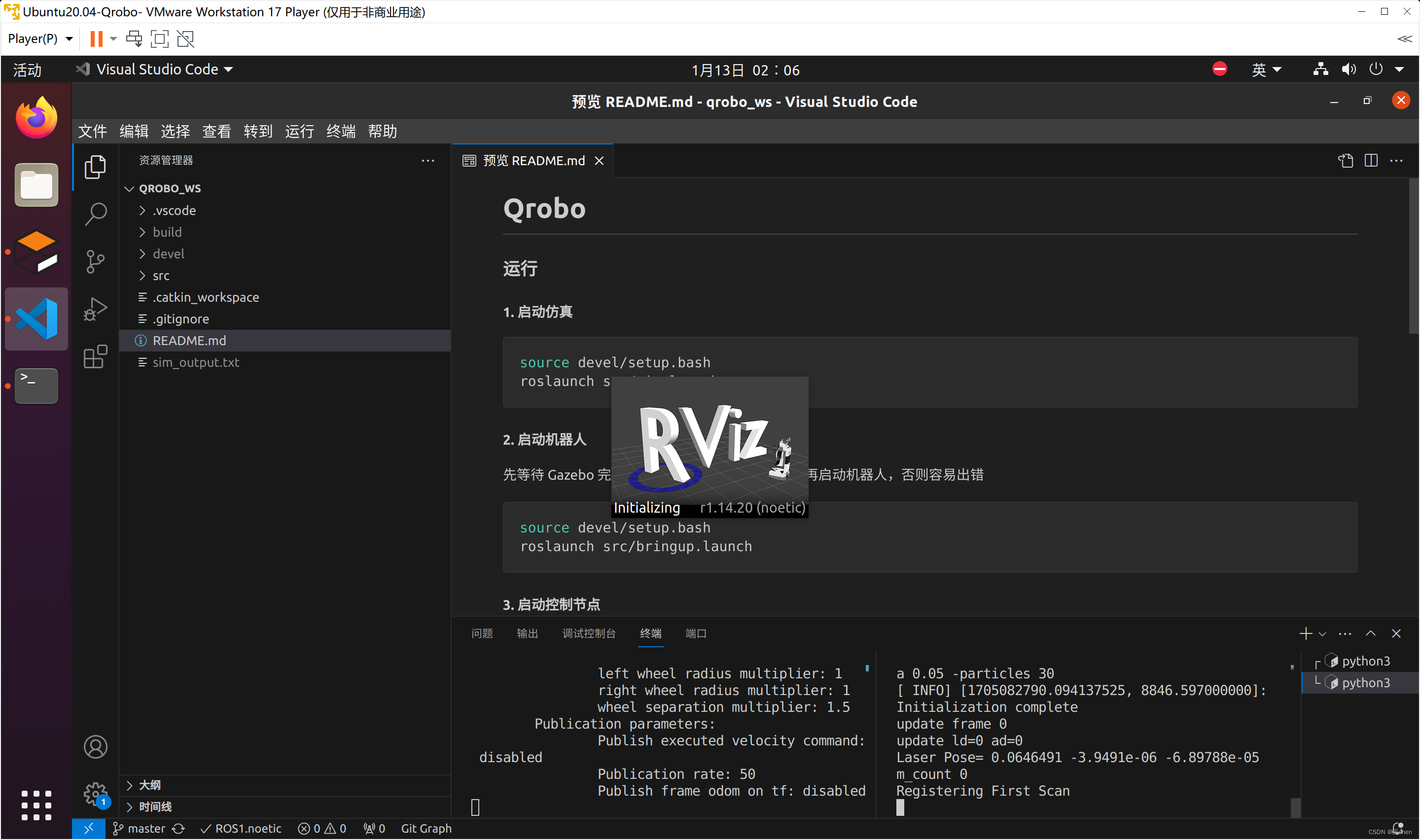
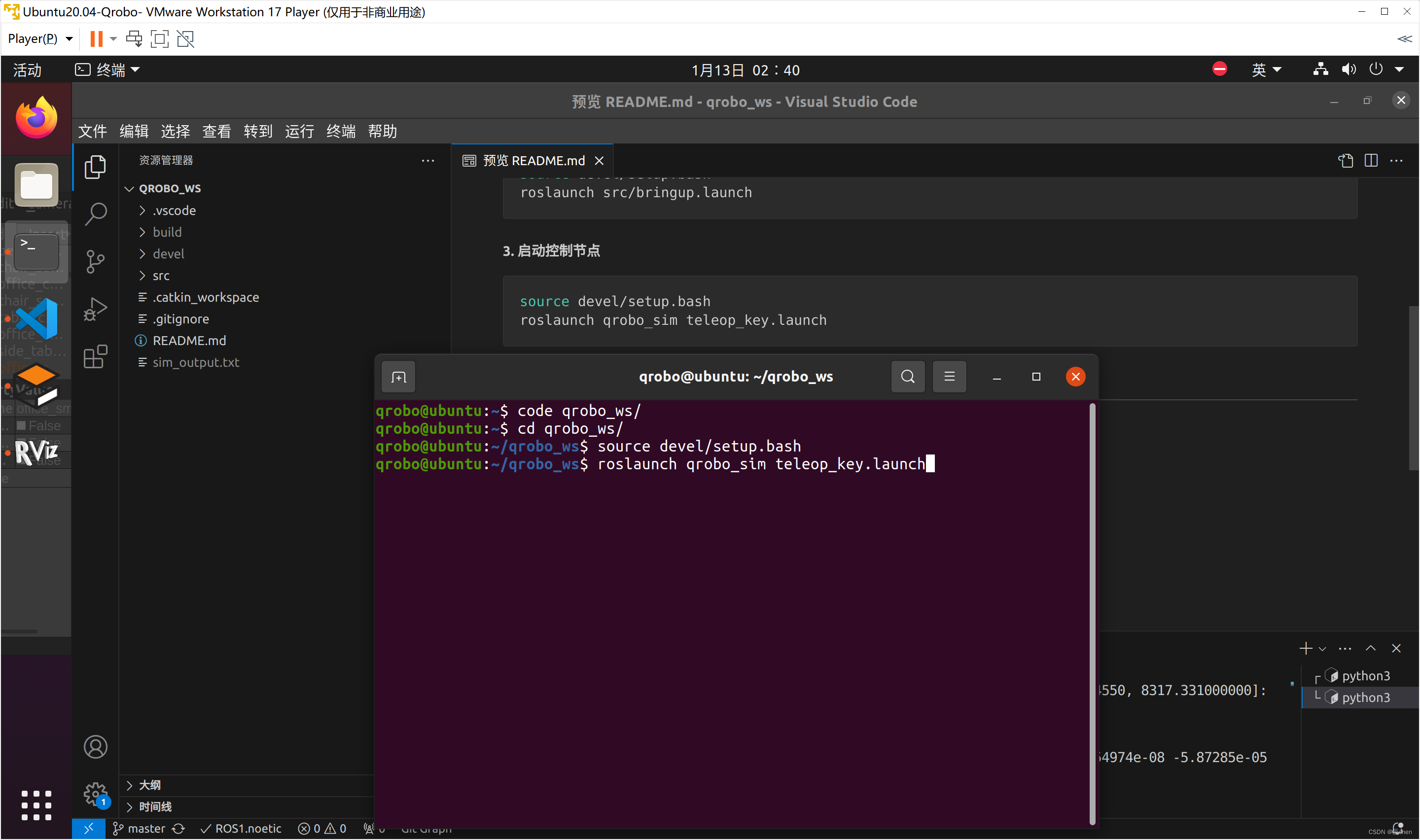
按照项目文件夹根目录的READMEmd 运行项目
注意,这里如果内存不够会死机卡死。
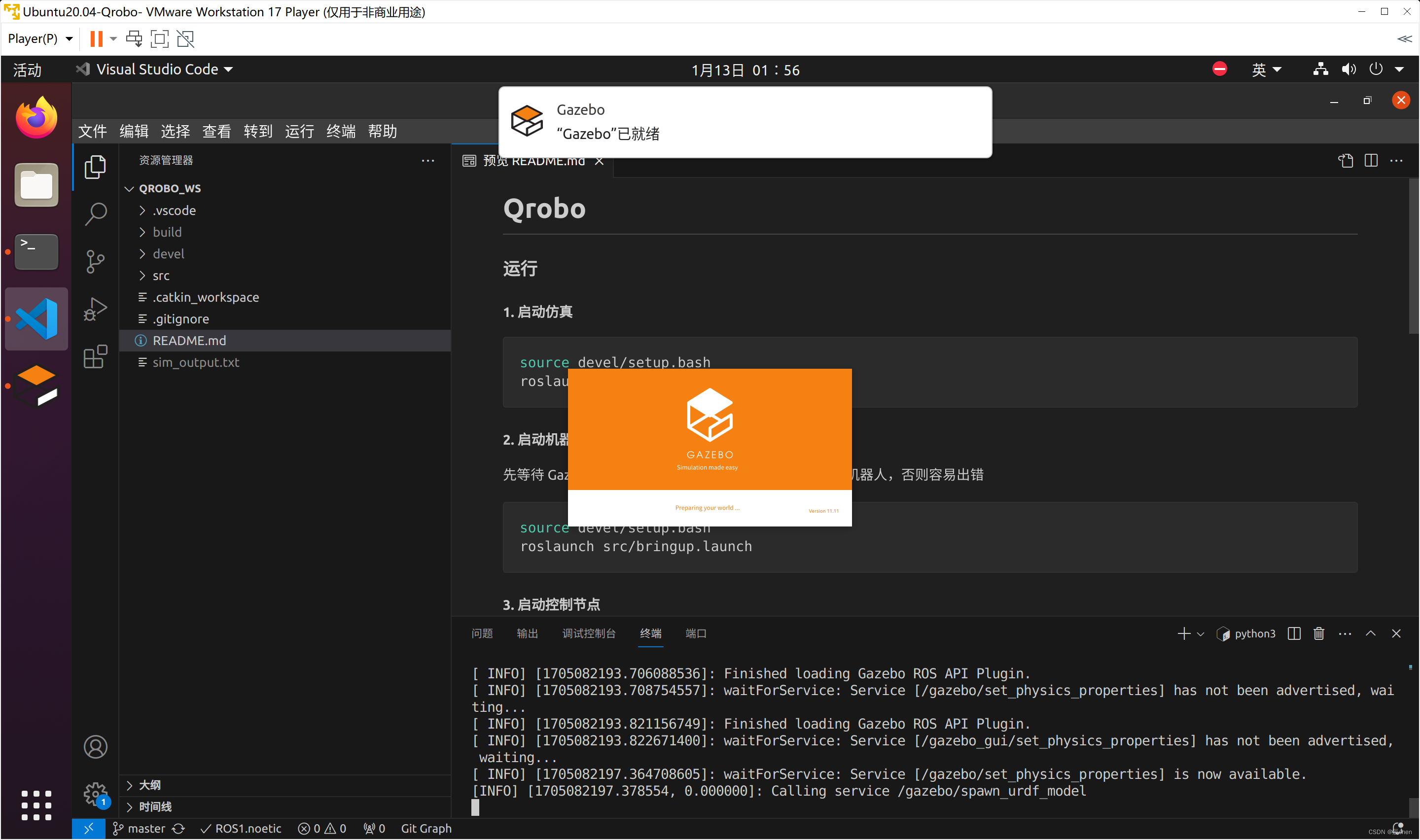
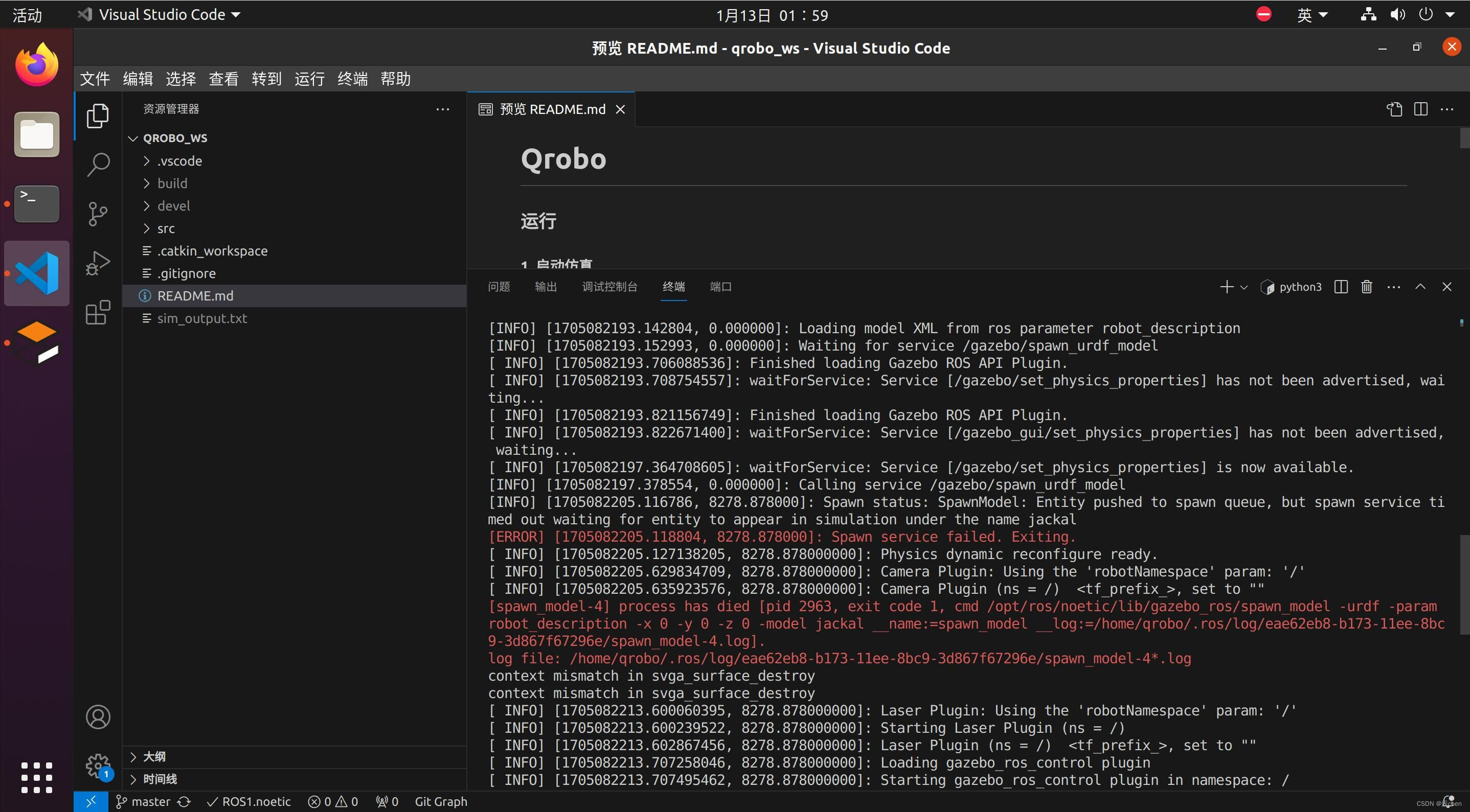
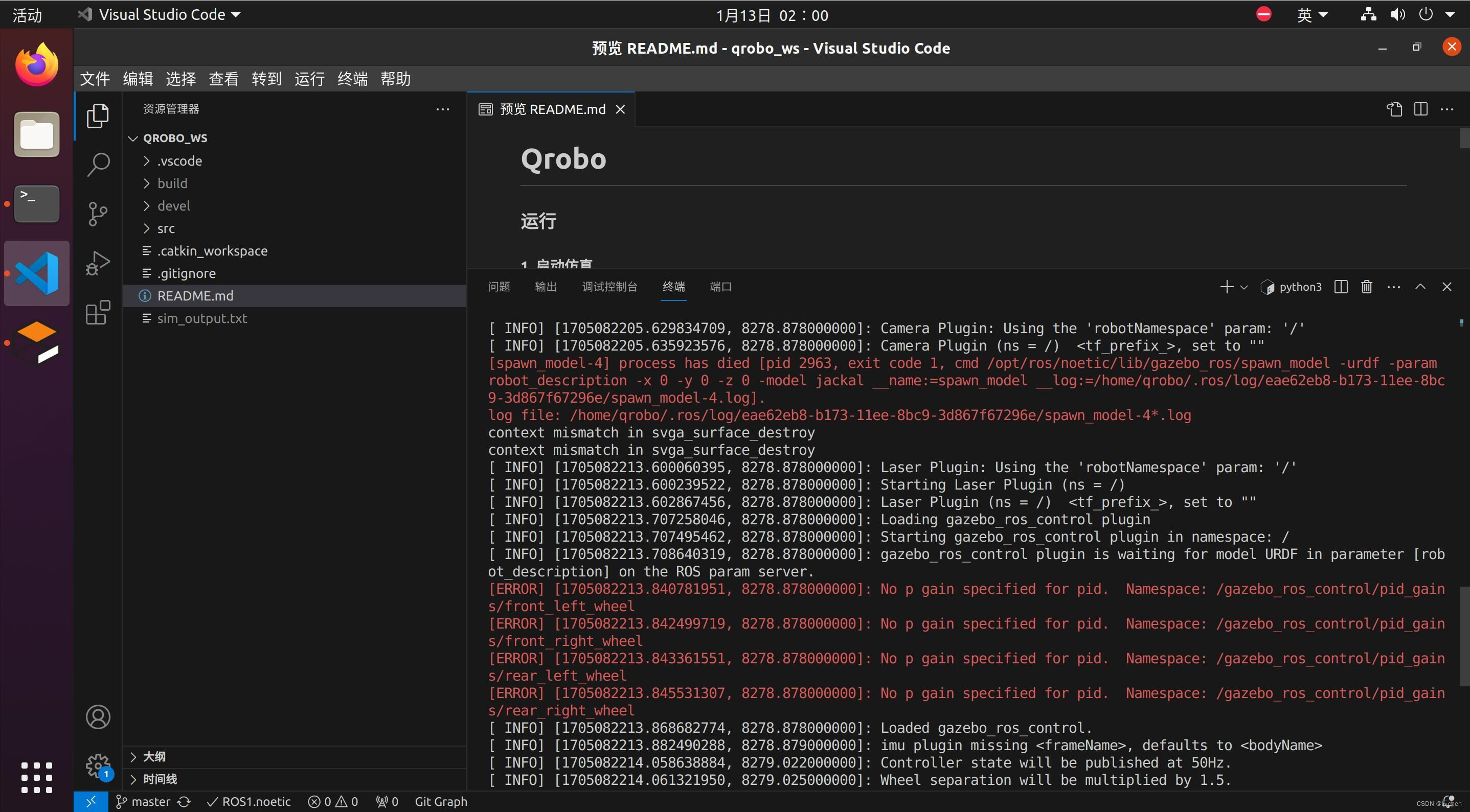
代码执行过程中可能会报如下两个错误,这是无关紧要的,只要能打开软件即可
第1个是虚拟机加载比较慢导致的,没有及时返回状态,没有影响
第2个是没用到的pid插件,不用管
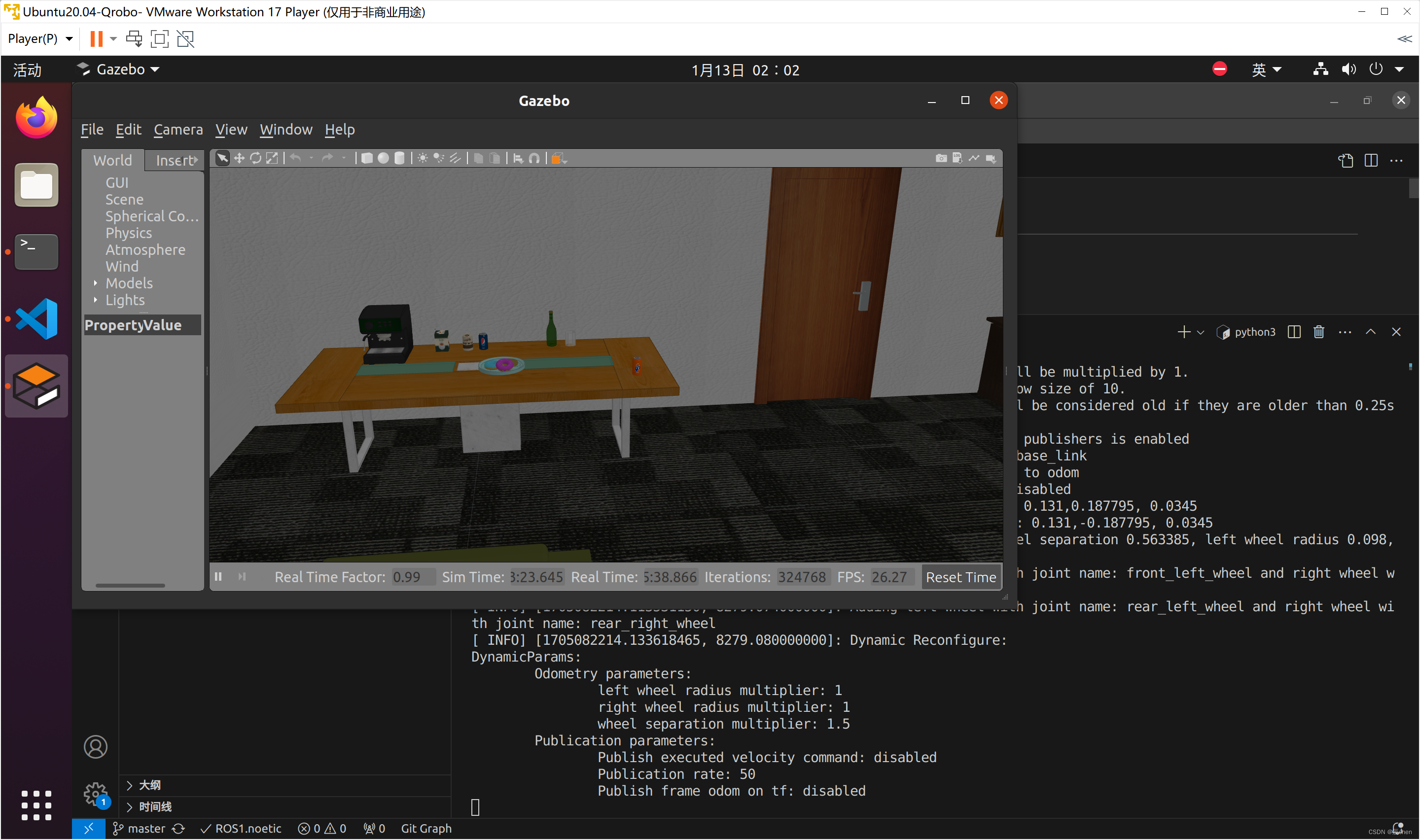
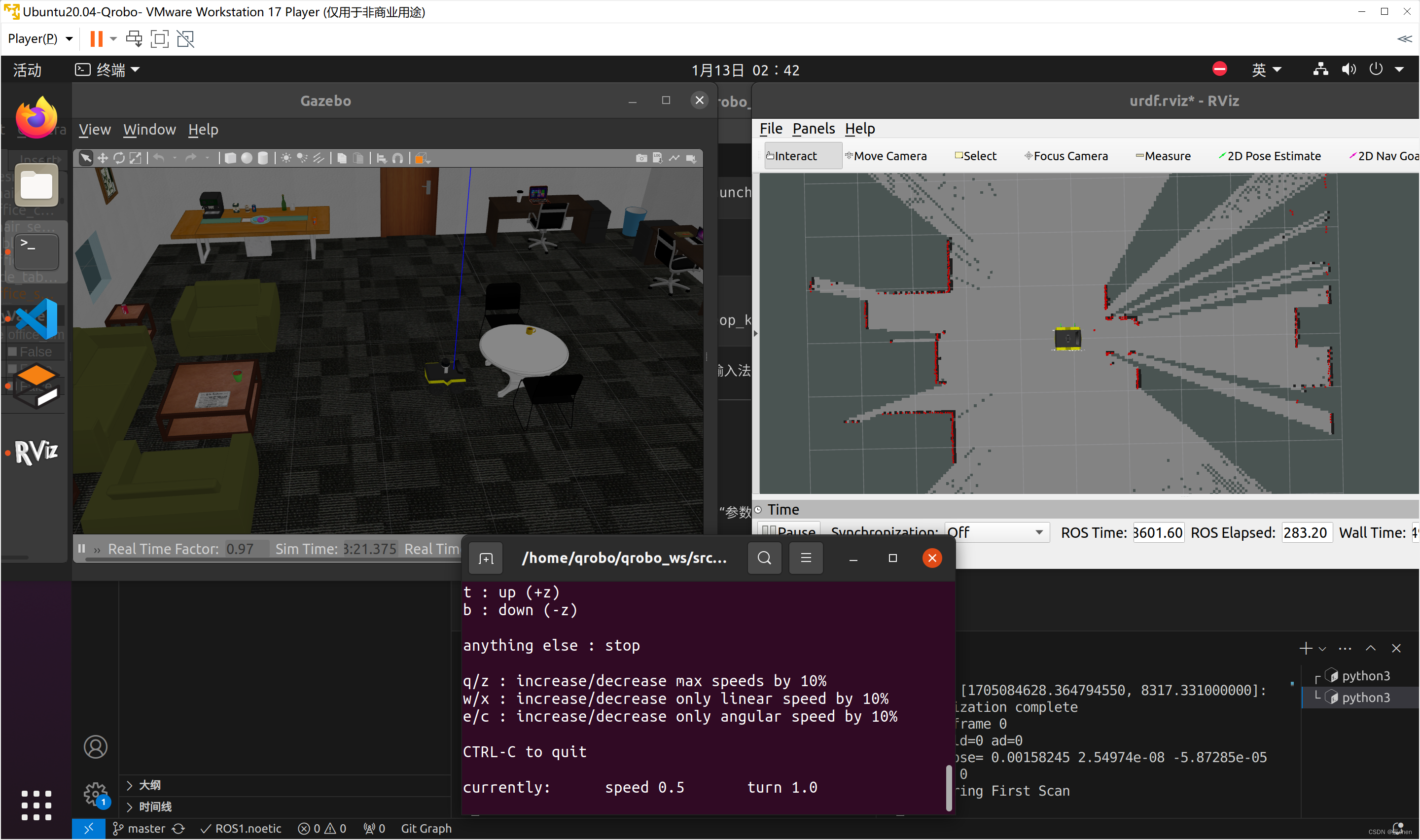
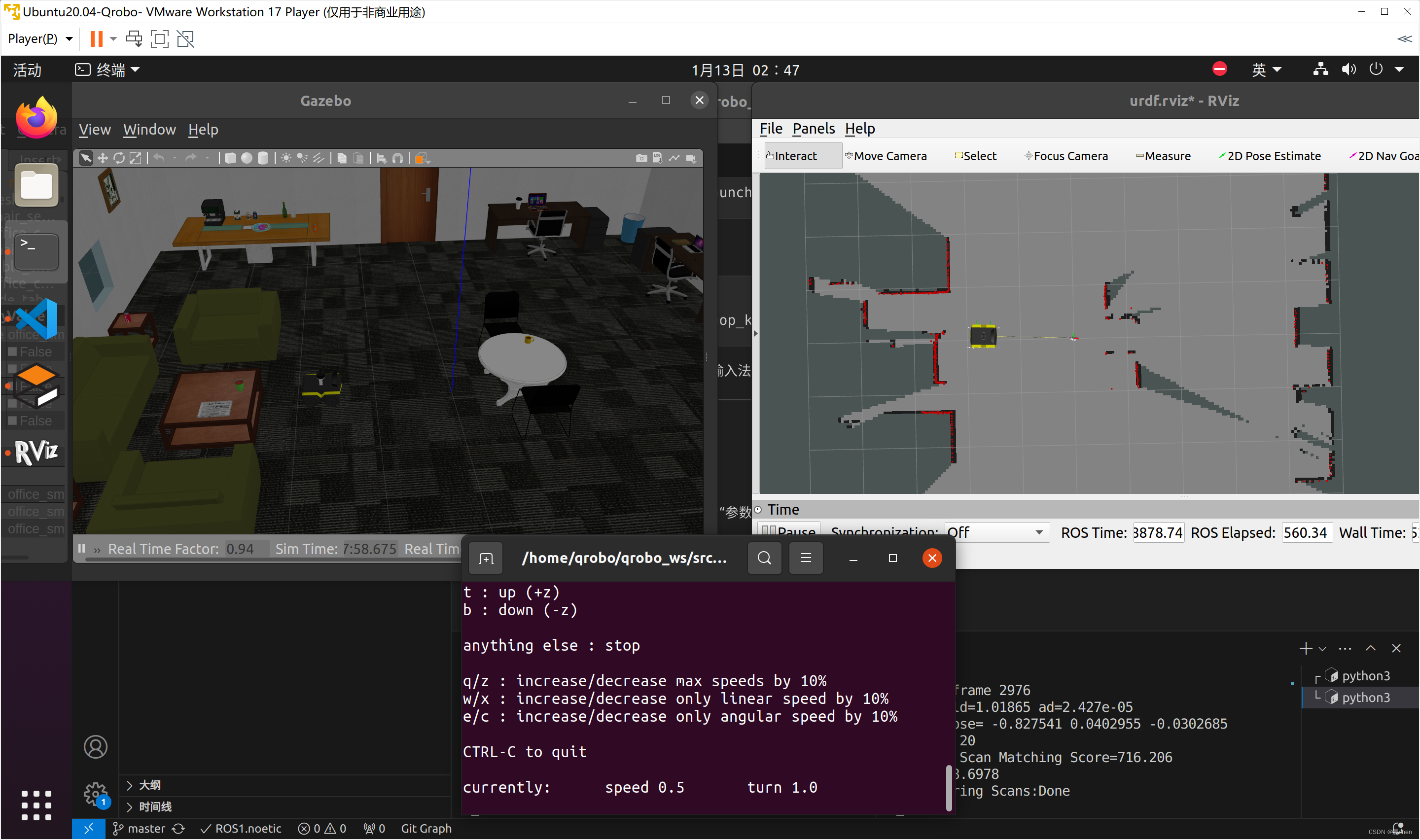
这里我们通过调整视角可以看到小车
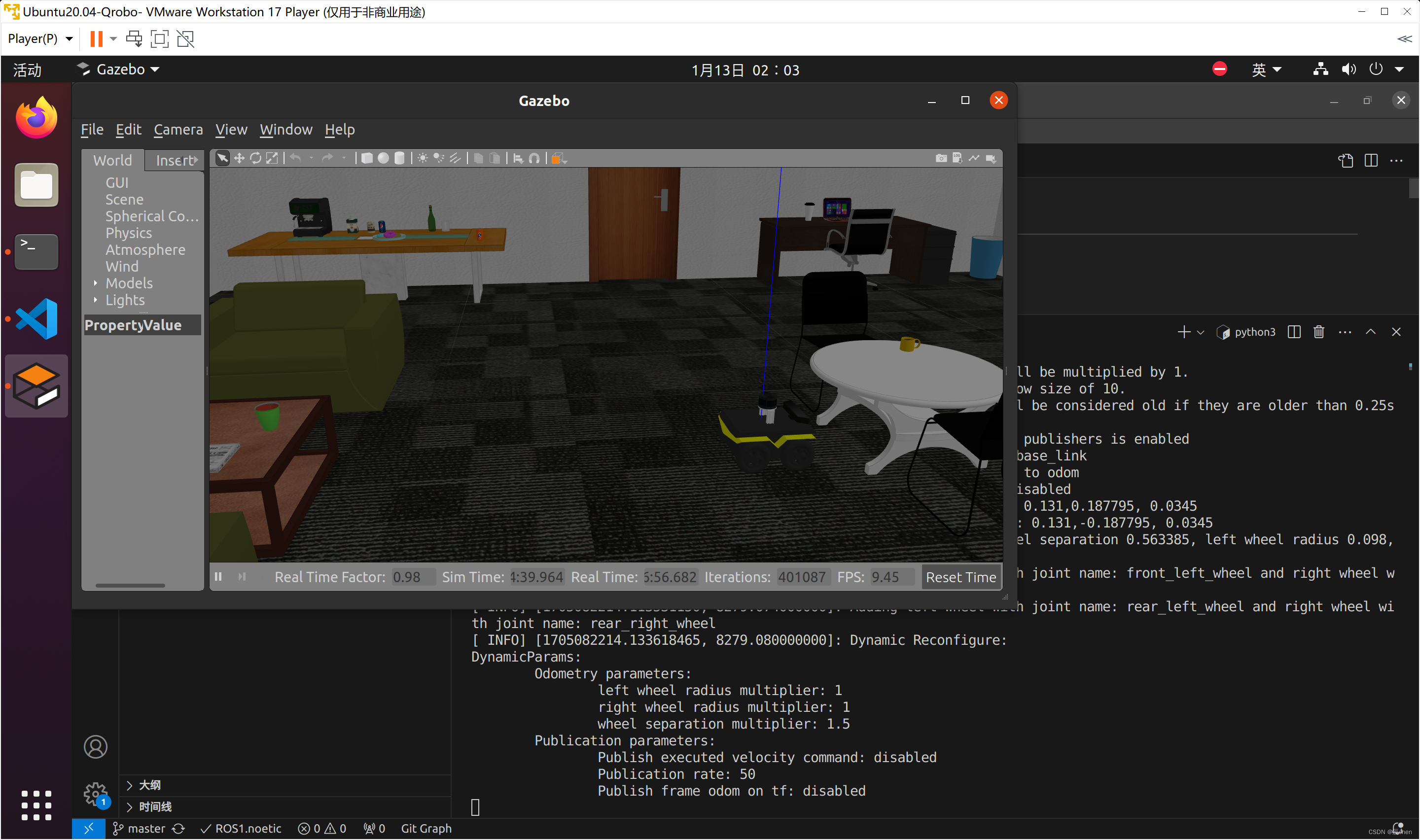
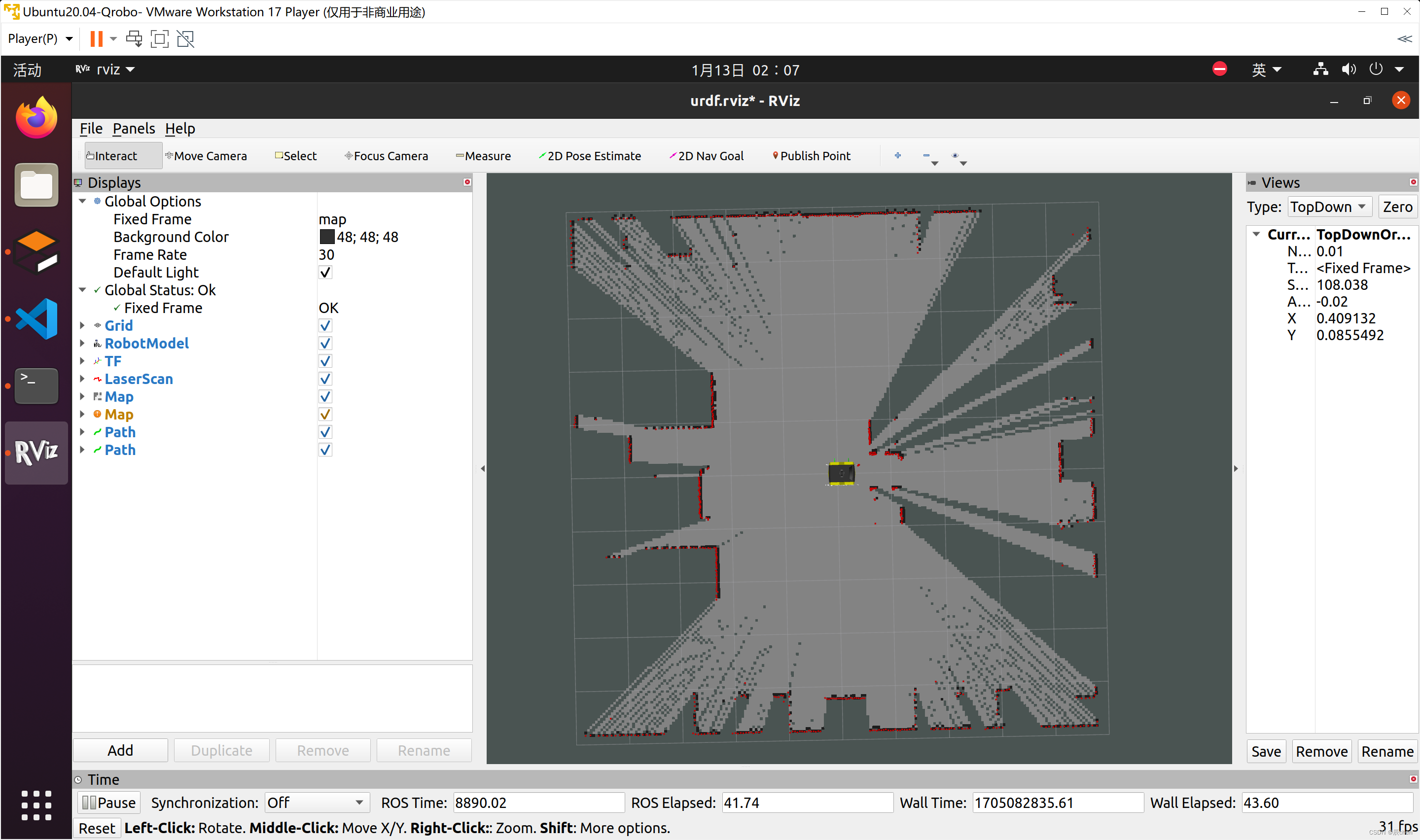
把三个视图缩放,如下图:当前界面为命令行时(即最后点击的是命令行窗口)可以按照提示控制小车移动