引言:基于空中物流的项目背景。我们提供了使用基于诗句的物体识别和精准投放、降落。实现原理如下:
1、在ROS下使用机载电脑实现物体识别
2、记载电脑根据反馈的位置发布运动控制指令
3、PX4解析机载电脑发布的命令,作出运动控制
4、设置阈值,满足后,ROS发布投放指令
一、视频演示:
视频链接
二、源代码下载链接
源码链接
三、使用说明
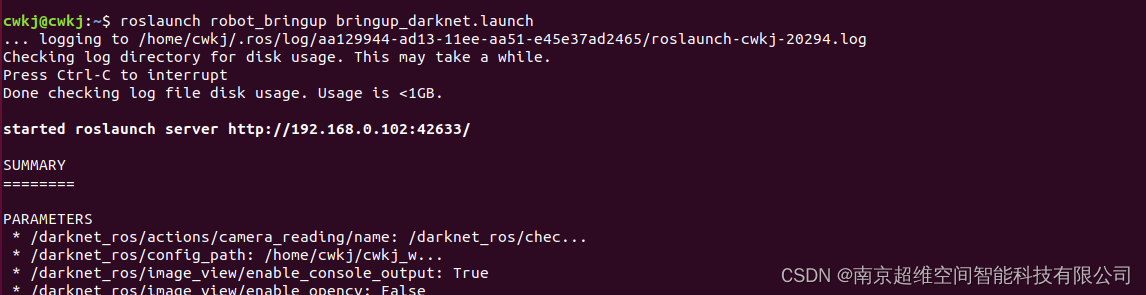
1、启动二维码识别与降落程序
roslaunch robot_bringup bringup_precise_drop.launch
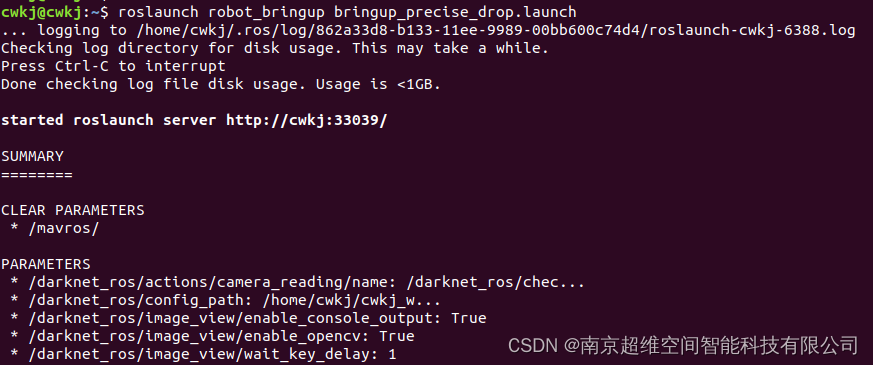
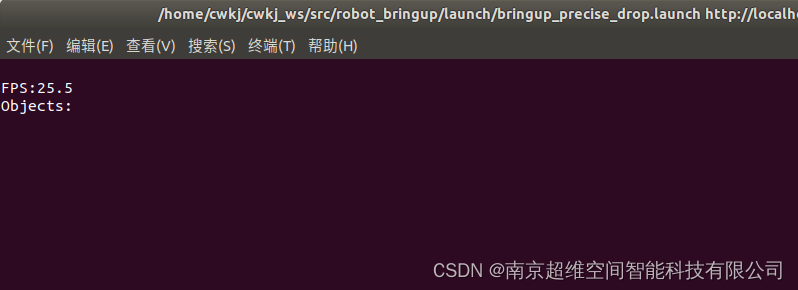
未出现红色报错,表明程序运行正常
2、launch文件详解
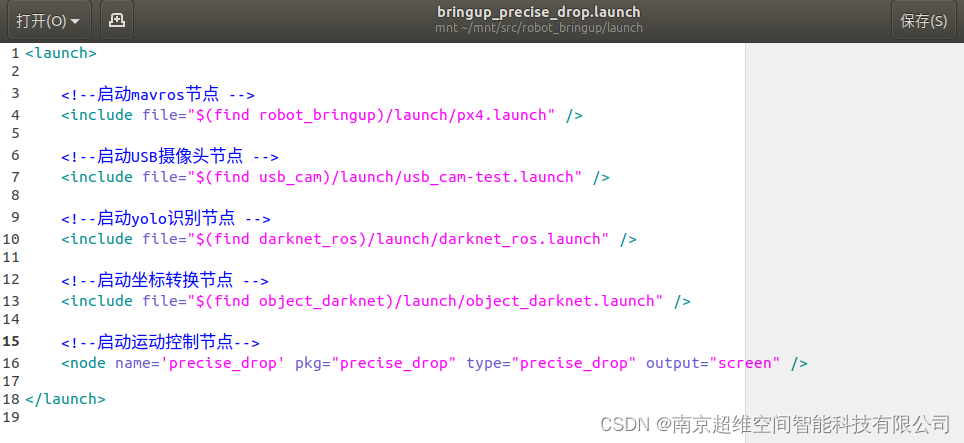
launch文件启动了四个节点,节点作用如下
1、mavros通信节点,实现底层PX4和ROS通信
2、启动USB摄像头节点,提供图像数据
3、启动yolo识别节点,
4、启动坐标转换节点,以话题方式发布识别到的目标物体的位置信息
5、启动运动控制节点,该节点定位实时的目标物体位置信息,进行运动控制


























![[计算机提升] 创建FTP共享](https://img-blog.csdnimg.cn/direct/4103b1ee8e854d198b4d068003118831.png)