运行案例 解锁无人机螺旋桨转动但无法起飞 也未报错
解决方法:
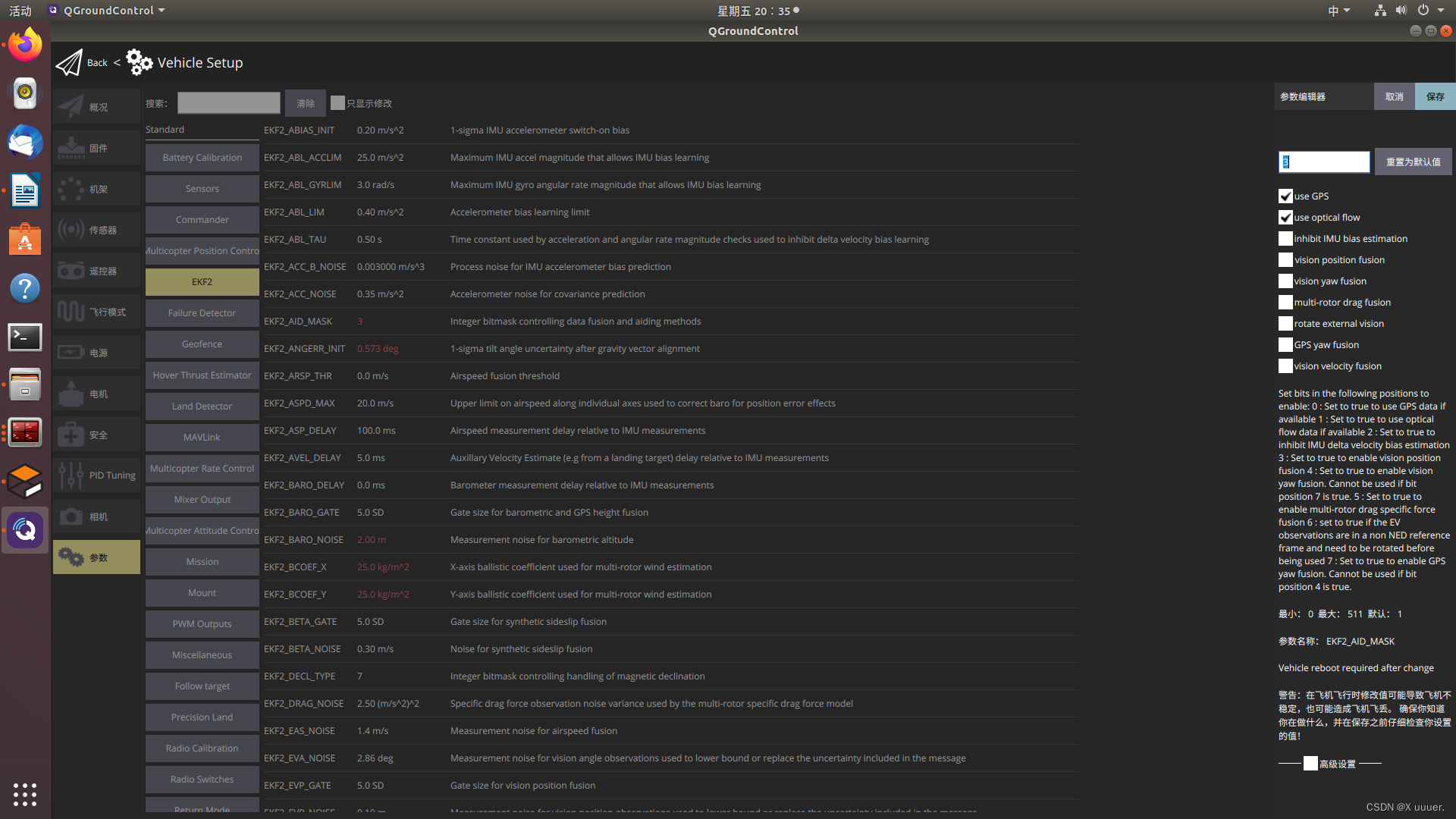
在QGC中修改:PX4飞控EKF配置
将PX4使用的EKF配置为融合GPS的水平位置与气压计高度。
如果我们想使用视觉定位,就需要把修改配置文件。
此修改意味着EKF融合来自mavros/vision_pose/pose的数据,并不是修改完无人机就可以视觉定位了,需要相关程序提供mavros/vision_pose/pose的数据,相关程序包括视觉SLAM、激光SLAM和获取Gazebo真值等。
如果没有额外的视觉数据,想要飞行必须改回基于GPS和气压计的定位。
一般情况下,自主飞行的无人机需要有位姿数据,查看/xxx_xx/mavros/local_position/pose应该有正确的数据。
步骤:
先运行launch文件
cd ~/PX4_Firmware
roslaunch px4 outdoor3.launch 然后打开QGC软件:
1

2
3