关于485通讯
485属于串口通信,属于物理层的,规定为2线,半双工的多点通信标准,它的电气特性不一样,用缆线两端电压差值来表示传递信号,rs485仅仅规定了接收端和发送端的电气特性,没有规定任何数据协议。
rs485特点如下:
1.接口电平低,不易损坏芯片,接口信号电平比232低,不易损坏芯片,高电平1以两线的电压差表示2-6v 低电平以两线电压-(2-6)v表示,且该电平与TTL电平兼容(TTL电平信号规定,+5V等价于逻辑“1”,0V等价于逻辑“0”)
2.传输速率高
3.抗干扰能力强
4.传输距离远
rs485可以用于线型和总线型,不可用于星形和环形
理想情况下485需要两个匹配电阻,其阻值一般要求等于传输电缆线的阻抗(一般为120Ω)
直流(DC) 交流(AC)
阻抗越小导电性能越好
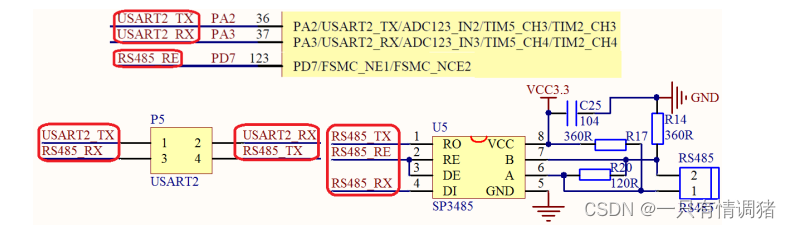
PD7控制485的收发,当0表示接收 1表示发送
R14和R17是偏置电阻用来保证空闲的时候电压差大于200mv用来表示逻辑1,避免造成逻辑错乱
#include "sys.h"
#include "rs485.h"
#include "delay.h"
#ifdef EN_USART2_RX //如果使能了接收
//接收缓存区
u8 RS485_RX_BUF[64]; //用一个数组来接收缓冲,最大 64 个字节.
//接收到的数据长度
u8 RS485_RX_CNT=0;
void USART2_IRQHandler(void)//中断处理事件
{
u8 res;
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) //接收到数据
{
res =USART_ReceiveData(USART2); //读取接收到的数据
if(RS485_RX_CNT<64)
{
RS485_RX_BUF[RS485_RX_CNT]=res; //记录接收到的值
RS485_RX_CNT++; //接收数据增加 1
}
}
}
#endif
//初始化 IO 串口 2
//bound:波特率
void RS485_Init(u32 bound)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOD, ENABLE); //使能 GPIOA,D 时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//使能串口 2 时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PG9 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PA2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;//PA3
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
=====================================//等号以上常规配置时钟
RCC_APB1PeriphResetCmd(RCC_APB1Periph_USART2,ENABLE); //复位串口 2
RCC_APB1PeriphResetCmd(RCC_APB1Periph_USART2,DISABLE);//停止复位
====================================//使能串口时钟
#ifdef EN_USART2_RX //如果使能了接收
USART_InitStructure.USART_BaudRate = bound; //波特率设置;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//8 位数据长度
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验位
USART_InitStructure.USART_HardwareFlowControl= USART_HardwareFlowControl_None; //无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发
USART_Init(USART2, &USART_InitStructure); //初始化串口
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn; //使能串口 2 中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3; //先占优先级 3 级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级 3 级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure); //初始化 NVIC 寄存器
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE); //开启中断
USART_Cmd(USART2, ENABLE); //使能串口
=================================//常规中断配置
#endif
RS485_TX_EN=0; //默认为接收模式
}
//RS485 发送 len 个字节.
//buf:发送区首地址
//len:发送的字节数(为了和本代码的接收匹配,这里建议不要超过 64 个字节)
void RS485_Send_Data(u8 *buf,u8 len)
{
u8 t;
RS485_TX_EN=1; //设置为发送模式
for(t=0;t<len;t++) //循环发送数据
{
while(USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET);
USART_SendData(USART2,buf[t]);
}
while(USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET);
RS485_RX_CNT=0;
RS485_TX_EN=0; //设置为接收模式
}
//RS485 查询接收到的数据
//buf:接收缓存首地址
//len:读到的数据长度
void RS485_Receive_Data(u8 *buf,u8 *len)
{
u8 rxlen=RS485_RX_CNT;
u8 i=0;
*len=0; //默认为 0
delay_ms(10); //等待 10ms,连续超过 10ms 没有接收到一个数据,则认为接收结束
if(rxlen==RS485_RX_CNT&&rxlen)//接收到了数据,且接收完成了
{
for(i=0;i<rxlen;i++)
{
buf[i]=RS485_RX_BUF[i];
}
*len=RS485_RX_CNT; //记录本次数据长度
RS485_RX_CNT=0; //清零
}
}