3D LiDAR传感器(或)3维 光探测和测距是一种先进的发光仪器,能够像我们人类一样在3维空间中感知现实世界。这项技术尤其彻底改变了地球观测、环境监测、侦察以及现在的自动驾驶领域。它提供准确和详细数据的能力有助于增进我们对环境和自然资源的理解和管理。
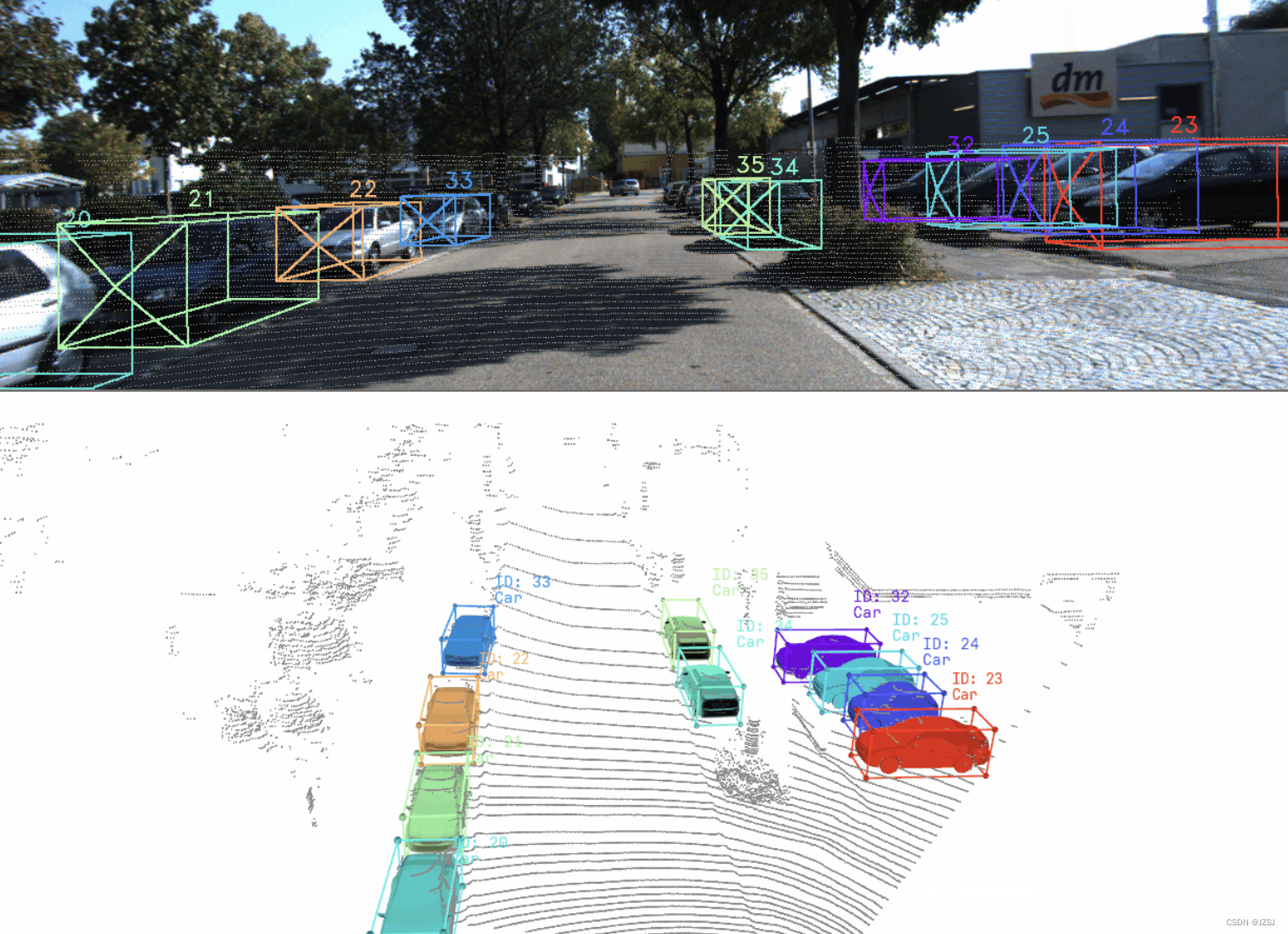
在这篇权威研究文章中,我们将全面关注 3D LiDAR 传感器数据的可视化,并尝试深入了解自动驾驶的 3D 点云表示系统。请继续关注本文的高潮部分——展示 3D 点云可视化的实验结果。
3D LiDAR传感器(或)3维 光探测和测距是一种先进的发光仪器,能够像我们人类一样在3维空间中感知现实世界。这项技术尤其彻底改变了地球观测、环境监测、侦察以及现在的自动驾驶领域。它提供准确和详细数据的能力有助于增进我们对环境和自然资源的理解和管理。
在这篇权威研究文章中,我们将全面关注 3D LiDAR 传感器数据的可视化,并尝试深入了解自动驾驶的 3D 点云表示系统。请继续关注本文的高潮部分——展示 3D 点云可视化的实验结果。






























![[AutoSar]基础部分 RTE 07 VFB虚拟功能总线](https://img-blog.csdnimg.cn/direct/84382a3c560e435da5ef2b99dfe01bc8.png)