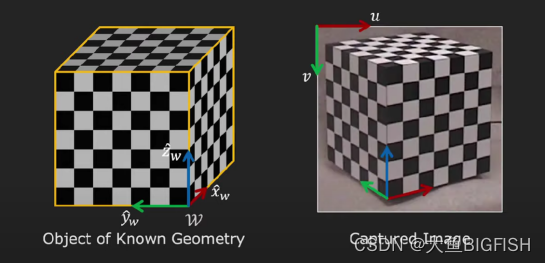
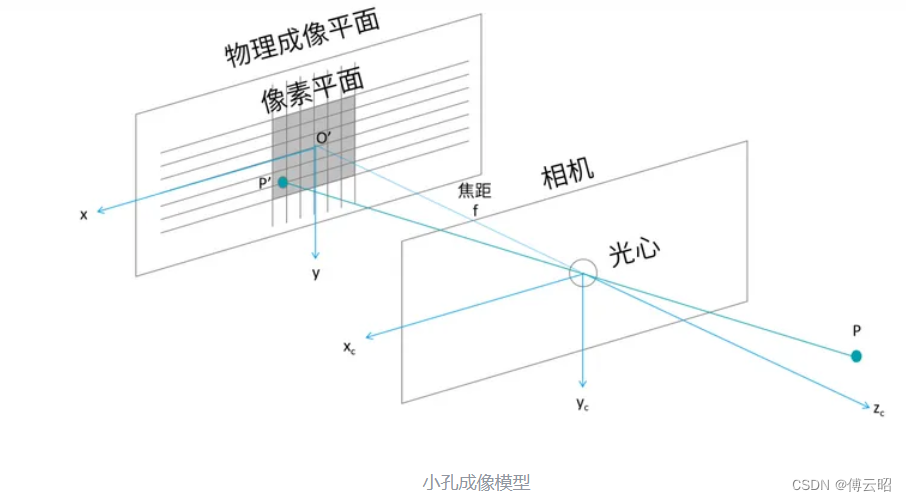
测量系统一般无法直接获取到待测物体的世界坐标,通过相机获取到被测物体图像上的点的坐标并非所需的坐标。因此需要建立相机和世界坐标系之间的关系,本文通过棋盘格靶标完成标定实验,获取到相机坐标系和世界坐标系之间的转换关系,其中相机标定以及标定结果输出的具体实现步骤如下所述:
1 相机标定步骤
1、首先需要启动MATLAB,打开CameraCalibrator相机标定工具箱;

图 1 标定工具箱选择
2、使用Add Images的From file获取已经拍摄好的棋盘格标定靶图片,图片数量多多益善,9张为宜,本文选择11张;


图2 图片导入
3、设置棋盘格每小格的参数,将被选图片进行导入;


图3 参数设置及其获取的棋盘格标靶
4、设计畸变参数,设置为切向畸变和径向畸变,如图为畸变参数设置,三阶畸变为鱼眼相机的畸变设置,在此不进行展开。
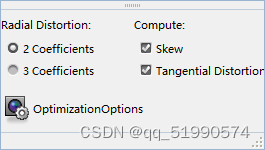
图4 畸变参数设置
5、在完成畸变设置后使用Calibrate按钮进行计算;

图5 使用Calibrate进行计算
6、计算完成后,可以观察到右上角的柱形图显示的是平均误差,右下角显示的是拍摄的相机的方位图,进行过对误差的分析,确定误差所在范围,随后将标定结果输出。
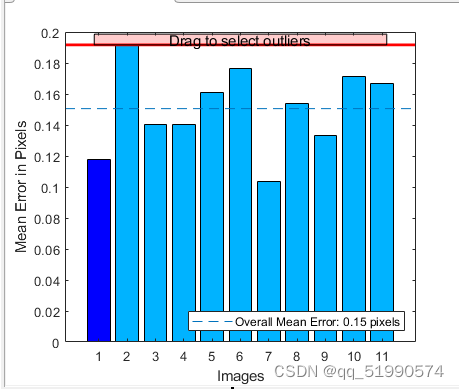
图6 平均误差柱形图

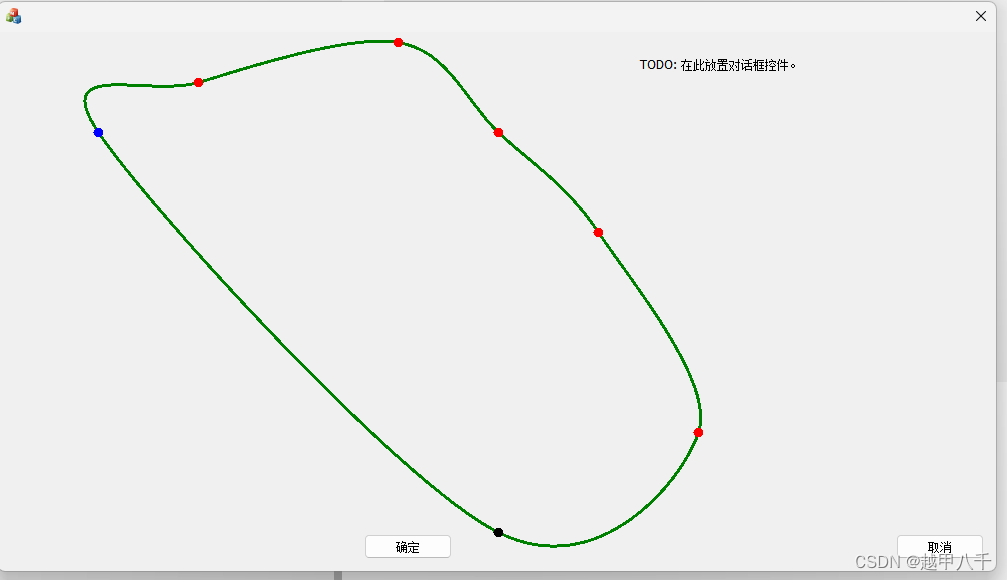
图7 相机方位图
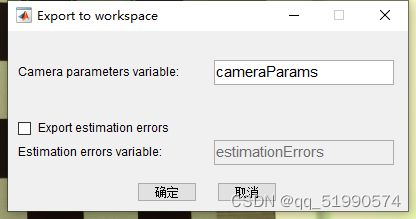
图8 标定结果输出
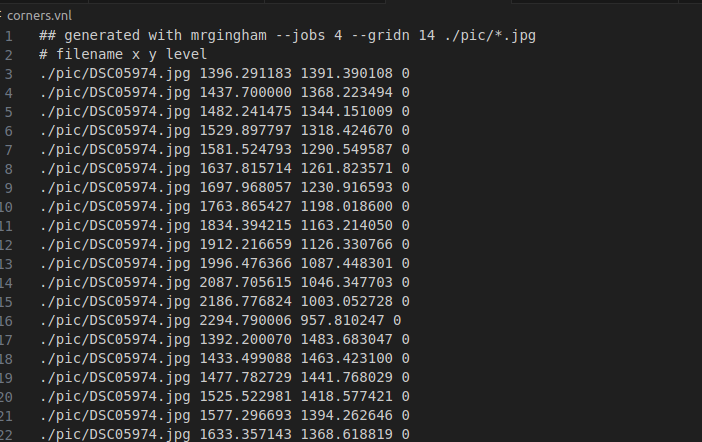
2 标定参数获取
获取到标定结果可以使用通过相应命令获取到所需的标定参数。

图9相机标定结果

图9 常用的参数命令























![[FL]Adversarial Machine Learning (1)](https://img-blog.csdnimg.cn/direct/f65cb7a59bf74c188d508b15746a8705.jpeg#pic_center)