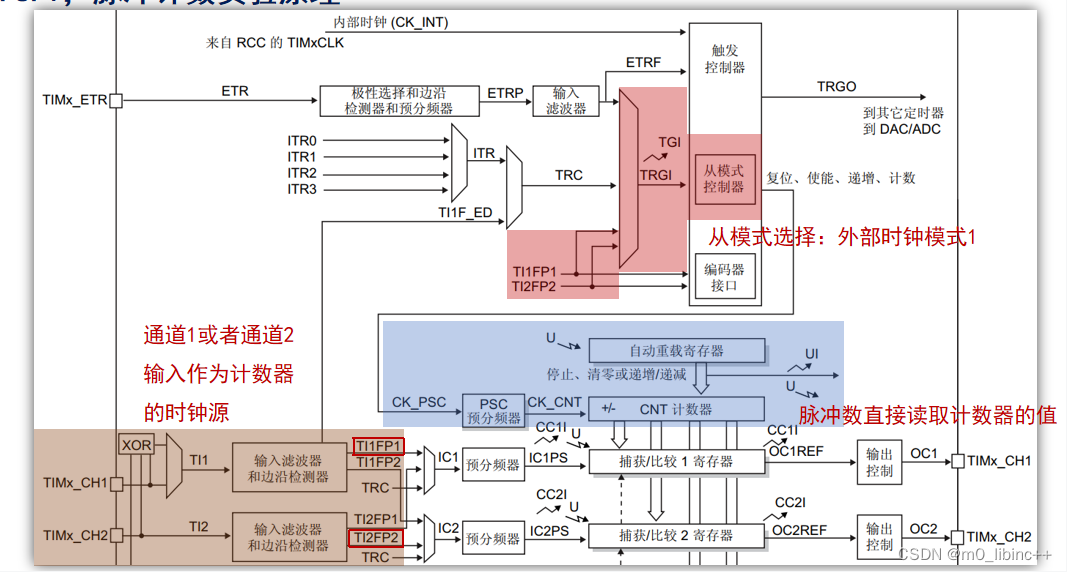
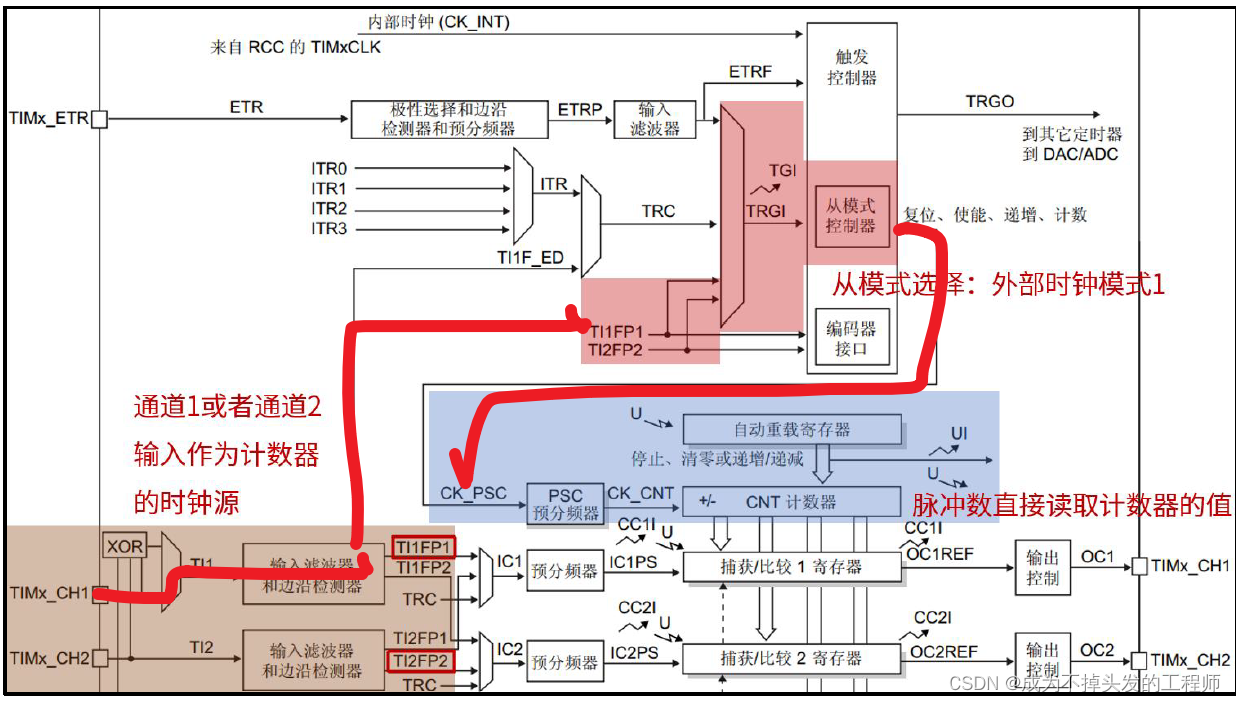
1.通用定时器捕获脉冲原理
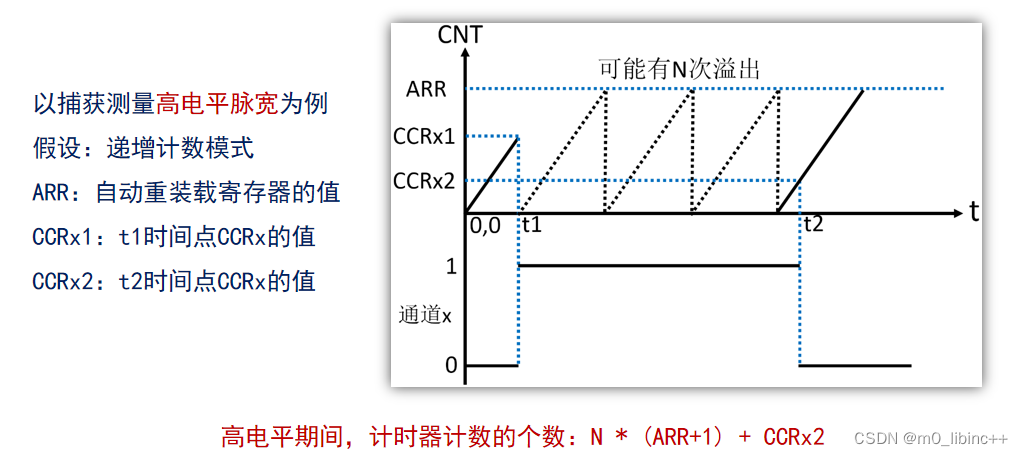
2.通用定时器捕获脉冲原理
1,配置定时器基础工作参数 HAL_TIM_IC_Init()
2,定时器输入捕获MSP初始化 HAL_TIM_IC_MspInit() 配置NVIC、CLOCK、GPIO等
3,配置输入通道映射、捕获边沿等 HAL_TIM_IC_ConfigChannel()
4,设置优先级,使能中断 HAL_NVIC_SetPriority()、 HAL_NVIC_EnableIRQ()
5,使能定时器更新中断 __HAL_TIM_ENABLE_IT()
6,使能捕获、捕获中断及计数器 HAL_TIM_IC_Start_IT()
7,编写中断服务函数 TIMx_IRQHandler()等 HAL_TIM_IRQHandler()
8,编写更新中断和捕获回调函数 :
HAL_TIM_PeriodElapsedCallback() HAL_TIM_IC_CaptureCallback()
3.通用定时器输入捕获实验
3.1 gtim.h
#ifndef __GTIM_H
#define __GTIM_H
#include "./SYSTEM/sys/sys.h"
//TIMX输入捕获定义
//这里使用的是TIM5_CH1,捕获WK_UP按键的输入,特别注意默认用的PA0,设置的是下拉电阻
//1.GPIOA与GPIO_PIN_0宏定义,引脚时钟使能,AF复用功能设置
#define GTIM_TIMX_CAP_CHY_GPIO_PORT GPIOA //GPIOA宏定义
#define GTIM_TIMX_CAP_CHY_GPIO_PIN GPIO_PIN_0 //GPIO_PIN_0宏定义
#define GTIM_TIMX_CAP_CHY_GPIO_CLK_ENABLE() do{
__HAL_RCC_GPIOA_CLK_ENABLE();}while(0) //PA口时钟使能
#define GTIM_TIMX_CAP_CHY_GPIO_AF GPIO_AF2_TIM5 // AF功能选择
//2.定时器5寄存器基地址、定时器5中断标志,定时器5中断处理函数、定时器通道选择、定时器5的输出比较寄存器、定时器5的时钟使能
#define GTIM_TIMX_CAP TIM5 //定时器5寄存器基地址
#define GTIM_TIMX_CAP_IRQn TIM5_IRQn //定时器5中中断标志
#define GTIM_TIMX_CAP_IRQHandler TIM5_IRQHandler //定时器5中断处理函数
#define GTIM_TIMX_CAP_CHY TIM_CHANNEL_1 //定时器通道选择
#define GTIM_TIMX_CAP_CHY_CCRX TIM5->CCR1 //定时器5的输出比较寄存器
#define GTIM_TIMX_CAP_CHY_CLK_ENABLE() do{
__HAL_RCC_TIM5_CLK_ENABLE();}while(0) //定时器5的时钟使能
//3.通用定时器输入捕获 通道Y、初始化函数
void gtim_timx_cap_chy_init(uint32_t arr,uint16_t psc);
#endif
3.1 gtim.c
#include "./BSP/TIMER/gtim.h"
#include "./BSP/LED/led.h"
//1.定时器X句柄定义
TIM_HandleTypeDef g_tim_cap_chy_handler;
// * @brief 通用定时器TIMX 通道Y 输入捕获 初始化函数
// * @note
// * 通用定时器的时钟来自APB1,当PPRE1 ≥ 2分频的时候
// * 通用定时器的时钟为APB1时钟的2倍, 而APB1为42M, 所以定时器时钟 = 84Mhz
// * 定时器溢出时间计算方法: Tout = ((arr + 1) * (psc + 1)) / Ft us.
// * Ft=定时器工作频率,单位:Mhz
// *
// * @param arr: 自动重装值
// * @param psc: 预分频系数
// * @retval 无
//2.通用定时器TIMX,通道Y 输入捕获初始化
void gtim_timx_cap_chy_init(uint32_t arr,uint16_t psc)
{
TIM_IC_InitTypeDef timx_ic_cap_chy = {
0}; //输入捕获结构体定义
//通用定时器工作参数初始化
g_tim_cap_chy_handler.Instance = GTIM_TIMX_CAP; //定时器5
g_tim_cap_chy_handler.Init.Period = arr; //自动重装载值
g_tim_cap_chy_handler.Init.Prescaler= psc; //预分频系数
g_tim_cap_chy_handler.Init.CounterMode= TIM_COUNTERMODE_UP; //递增计数
HAL_TIM_IC_Init(&g_tim_cap_chy_handler); //定时器初始化
//4.配置输入通道映射、捕获边沿等
timx_ic_cap_chy.ICPolarity = TIM_ICPOLARITY_RISING; //上升沿捕获
timx_ic_cap_chy.ICSelection= TIM_ICSELECTION_DIRECTTI; //映射到TI1上
timx_ic_cap_chy.ICPrescaler=TIM_ICPSC_DIV1; //不分频
timx_ic_cap_chy.ICFilter=0; //不滤波
HAL_TIM_IC_ConfigChannel(&g_tim_cap_chy_handler, &timx_ic_cap_chy, GTIM_TIMX_CAP_CHY); //配置定时器5通道1
//6.使能捕获,捕获中断及计数器
HAL_TIM_IC_Start_IT(&g_tim_cap_chy_handler, GTIM_TIMX_CAP_CHY);
}
//3.通用定时器TIMX,通道Y 输入捕获初始化接口包括GPIO、NVIC、Clock等
//此函数会被HAL_TIM_IC_Init()调用
void HAL_TIM_IC_MspInit(TIM_HandleTypeDef *htim)
{
if(htim->Instance == GTIM_TIMX_CAP) //TIM5通道捕获
{
GPIO_InitTypeDef gpio_init_struct;
//GPIO时钟使能
GTIM_TIMX_CAP_CHY_GPIO_CLK_ENABLE();
//TIM5定时器时钟使能
GTIM_TIMX_CAP_CHY_CLK_ENABLE();
//GPIO初始化
gpio_init_struct.Pin = GTIM_TIMX_CAP_CHY_GPIO_PIN; //输入捕获GPIO口
gpio_init_struct.Pull = GPIO_PULLDOWN; //下拉电阻
gpio_init_struct.Mode = GPIO_MODE_AF_PP; //复用推挽输出
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; //高速
gpio_init_struct.Alternate = GTIM_TIMX_CAP_CHY_GPIO_AF; //复用为捕获为TIM5的通道1
HAL_GPIO_Init(GTIM_TIMX_CAP_CHY_GPIO_PORT, &gpio_init_struct); \
//5 设置中断优先级、中断使能
HAL_NVIC_SetPriority(GTIM_TIMX_CAP_IRQn,1,3);
HAL_NVIC_EnableIRQ(GTIM_TIMX_CAP_IRQn);
}
}
//7.编写定时器5中断服务函数
void GTIM_TIMX_CAP_IRQHandler()
{
HAL_TIM_IRQHandler(&g_tim_cap_chy_handler); //定时器公共中断处理函数
}
//* 输入捕获状态(g_timxchy_cap_sta)
// * [7] :0,没有成功的捕获;1,成功捕获到一次.
// * [6] :0,还没捕获到高电平;1,已经捕获到高电平了.
// * [5:0]:捕获高电平后溢出的次数,最多溢出63次,所以最长捕获值 = 63*65536 + 65535 = 4194303
// * 注意:为了通用,我们默认ARR和CCRy都是16位寄存器,对于32位的定时器(如:TIM5),也只按16位使用
// * 按1us的计数频率,最长溢出时间为:4194303 us, 约4.19秒
// *
// * (说明一下:正常32位定时器来说,1us计数器加1,溢出时间:4294秒)
// *
uint8_t g_timxchy_cap_sta = 0; //输入捕获状态
uint16_t g_timxchy_cap_val = 0; //输入捕获值
//8.定时器捕获中断处理回调函数
//该函数在HAL_TIM_IRQHandler中会被调用
//此函数被调用代表发生了捕获
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if((g_timxchy_cap_sta & 0X80)==0) //还没有成功捕获
{
//8.2//捕获到一个下降沿
if(g_timxchy_cap_sta & 0X40)
{
//8.2.1标记成功捕捉到一次电频脉冲
g_timxchy_cap_sta |= 0X80;
//8.2.2获取当前捕获值
g_timxchy_cap_val = HAL_TIM_ReadCapturedValue(&g_tim_cap_chy_handler,GTIM_TIMX_CAP_CHY);
//8.2.3一定清除原来的设置
TIM_RESET_CAPTUREPOLARITY(&g_tim_cap_chy_handler,GTIM_TIMX_CAP_CHY);
//8.2.4定时器5通道1设置为上升沿捕获
TIM_SET_CAPTUREPOLARITY(&g_tim_cap_chy_handler,GTIM_TIMX_CAP_CHY, TIM_ICPOLARITY_RISING);
}
//8.1还未开始,第一次捕捉一个上升沿
else
{
//8.1.1情空
g_timxchy_cap_sta = 0;
g_timxchy_cap_val = 0;
//8.1.2g_timxchy_cap_sta位6置1表示捕捉到了上升沿
g_timxchy_cap_sta |= 0X40; //标记捕捉到了上升沿
//8.1.3关闭定时器
__HAL_TIM_DISABLE(&g_tim_cap_chy_handler);
//8.1.4定时器5计时器清零
__HAL_TIM_SET_COUNTER(&g_tim_cap_chy_handler,0);
//8.1.5一定清除原来的设置
TIM_RESET_CAPTUREPOLARITY(&g_tim_cap_chy_handler,GTIM_TIMX_CAP_CHY);
//8.1.6定时器5通道1设置为下降沿捕获
TIM_SET_CAPTUREPOLARITY(&g_tim_cap_chy_handler,GTIM_TIMX_CAP_CHY, TIM_ICPOLARITY_FALLING);
//8.1.7开启定时器
__HAL_TIM_ENABLE(&g_tim_cap_chy_handler);
}
}
}
//9.编写更新中断回调函数
//该函数在HAL_TIM_IRQHandler中会被共同调用
//此函数调用代表发生了溢出
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if((g_timxchy_cap_sta & 0X80)==0) //还没有成功捕获
{
if(g_timxchy_cap_sta & 0X40) //已经捕获到了高电平
{
if((g_timxchy_cap_sta & 0X3F)==0X3F) //高电平太长了
{
TIM_RESET_CAPTUREPOLARITY(&g_tim_cap_chy_handler,GTIM_TIMX_CAP_CHY); //一定清除原来的设置
TIM_SET_CAPTUREPOLARITY(&g_tim_cap_chy_handler,GTIM_TIMX_CAP_CHY, TIM_ICPOLARITY_RISING);//定时器5通道1设置为上升沿捕获
g_timxchy_cap_sta |= 0X80; //标记成功捕获一次
g_timxchy_cap_val = 0XFFFF;
}
else
{
g_timxchy_cap_sta++; //累计定时器溢出次数
}
}
}
}
3.1 main.c
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/KEY/key.h"
#include "./BSP/TIMER/gtim.h"
extern uint8_t g_timxchy_cap_sta; //输入捕获状态
extern uint16_t g_timxchy_cap_val; //输入捕获值
int main(void)
{
uint32_t temp = 0;
uint8_t t = 1;
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(336, 8, 2, 7); /* 设置时钟,168Mhz */
delay_init(168); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
led_init(); /* 初始化LED */
key_init(); /* 初始化按键 */
gtim_timx_cap_chy_init(0xFFFF, 84 - 1); /* 以1Mhz的频率计数 捕获 */
while (1)
{
if (g_timxchy_cap_sta & 0x80) /* 成功捕获到了一次高电平 */
{
temp = g_timxchy_cap_sta & 0x3F;
temp *= 0xFFFF; /* 溢出时间总和 */
temp += g_timxchy_cap_val; /* 得到总的高电平时间 */
printf("HIGH:%d us\r\n", temp); /* 打印总的高电平时间 */
g_timxchy_cap_sta = 0; /* 开启下一次捕获 */
}
t++;
if (t > 20) /* 200ms进入一次 */
{
t = 0;
LED0_TOGGLE(); /* LED0闪烁 ,提示程序运行 */
}
delay_ms(10);
}
}