参考文献:基于复合型虚拟阻抗与自适应下垂控制的并联逆变器功率均分策略---施家博
一、下垂控制原理
在逆变器并联系统容易发生输出功率分配不均的问题,不均匀分配会导致系统环流的增加,对逆变器以及负载造成严重影响,所以并联逆变器的稳定运行和精确的功率分配尤为重要。
最常用方法是下垂控制,原理是通过对输出电压的频率与幅值进行控制,进而对有功和无功进行分配,该方法不需要逆变器之间互相通讯,系统扩容方便。
研究方向集中在虚拟阻抗设计,包括虚拟电感控制和虚拟负电阻控制。
二、并联逆变器功率分配
2.1 传统下垂控制下的功率分析
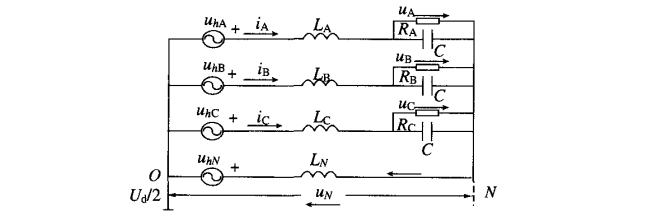
逆变器的有功功率与无功功率分别为下式:
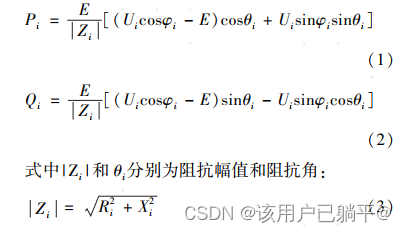

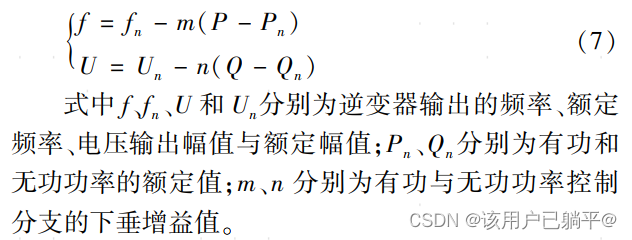
由上述两式可知有功和无功功率分别于逆变器的输出相角(等效为角频率或频率)和电压幅值有关。即传统下垂控制的表达式:
2.2 无功功率不均分原因分析
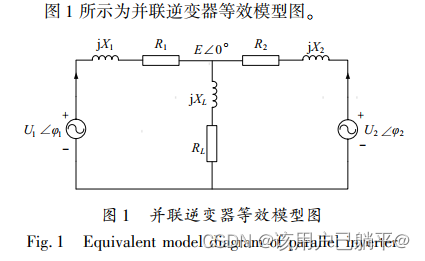
两台逆变器阻抗不同,输出电压经过线路阻抗减少的电压值不同,若使得负载处电压仍为额定值,则该逆变器的输出电压增大,根据下垂控制原理,该逆变器的输出无功功率应减小,导致两个并联的逆变器输出无功功率不同并产生系统环流。
通常有功控制回路存在积分项,对频率的给定可以实现无静差跟踪,因此f1=f2,p1=p2.
三、基于虚拟阻抗的改进下垂控制法
3.1 改进虚拟阻抗
目标是线路阻抗的阻性成分抵消,实现阻抗为纯感性。
根据实际线路的感抗不同,施加不同的虚拟感抗值,最终使X1=X2;

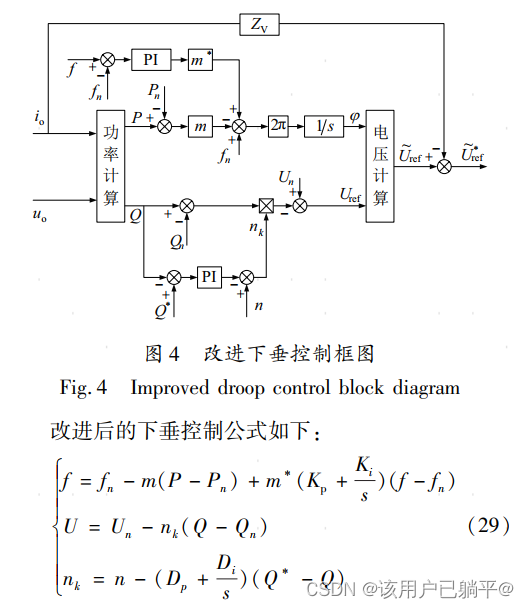
3.2 改进下垂控制法
为进一步提高动态响应和无功功率均分精度,对常规下垂控制进行改进,如下:
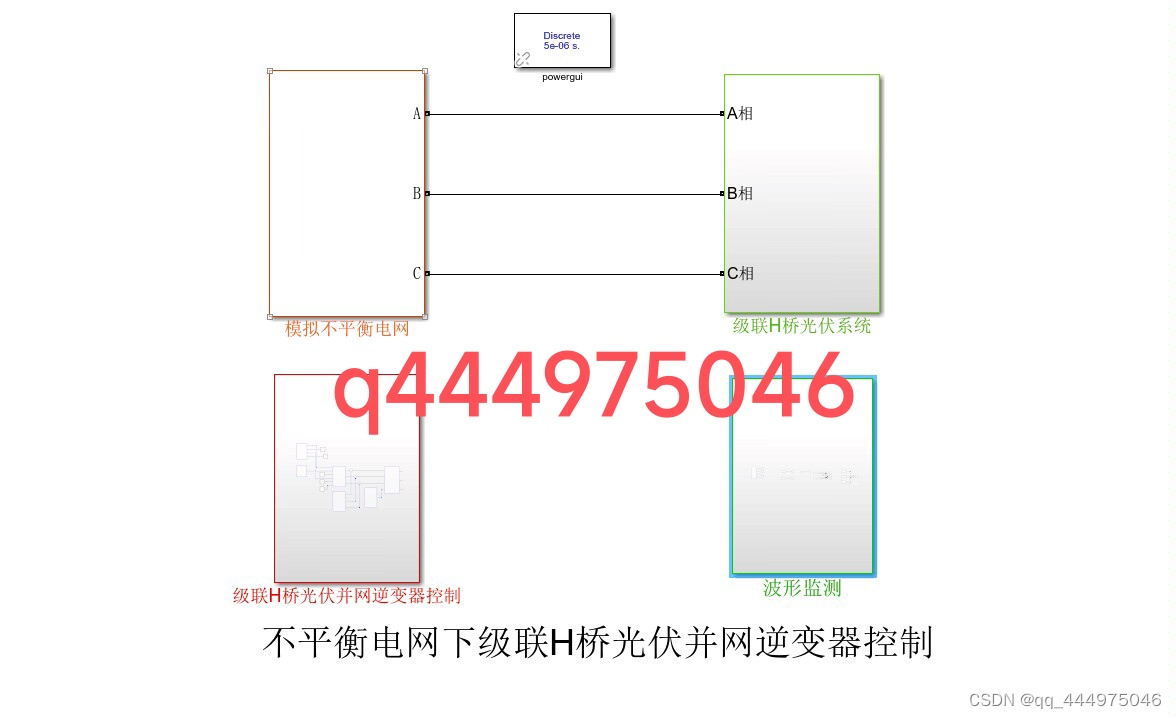
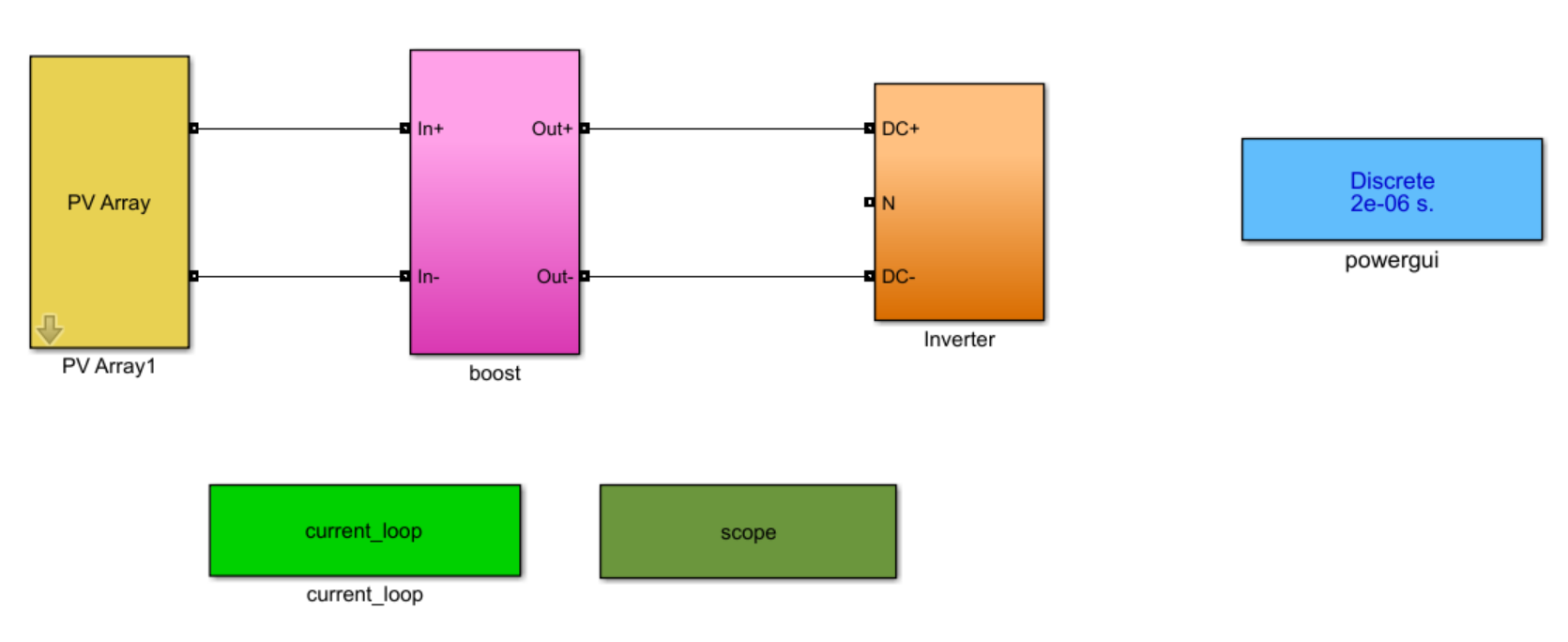
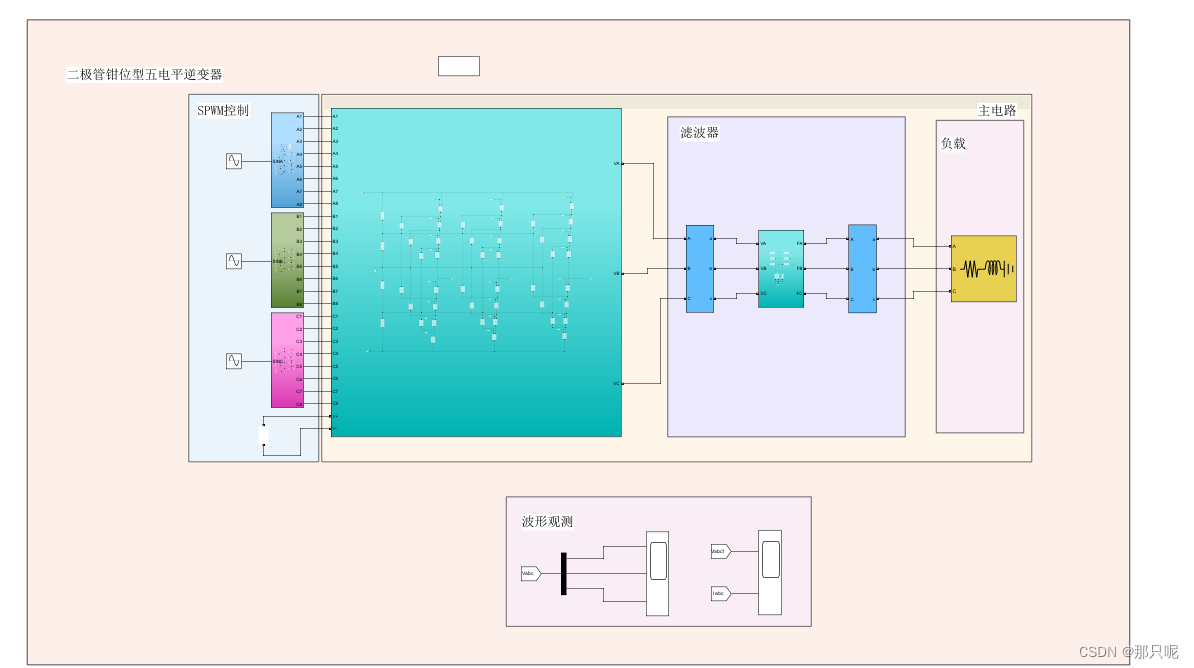
四、MATLAB仿真
本仿真为传统下垂控制仿真,实现了两机功率均分。
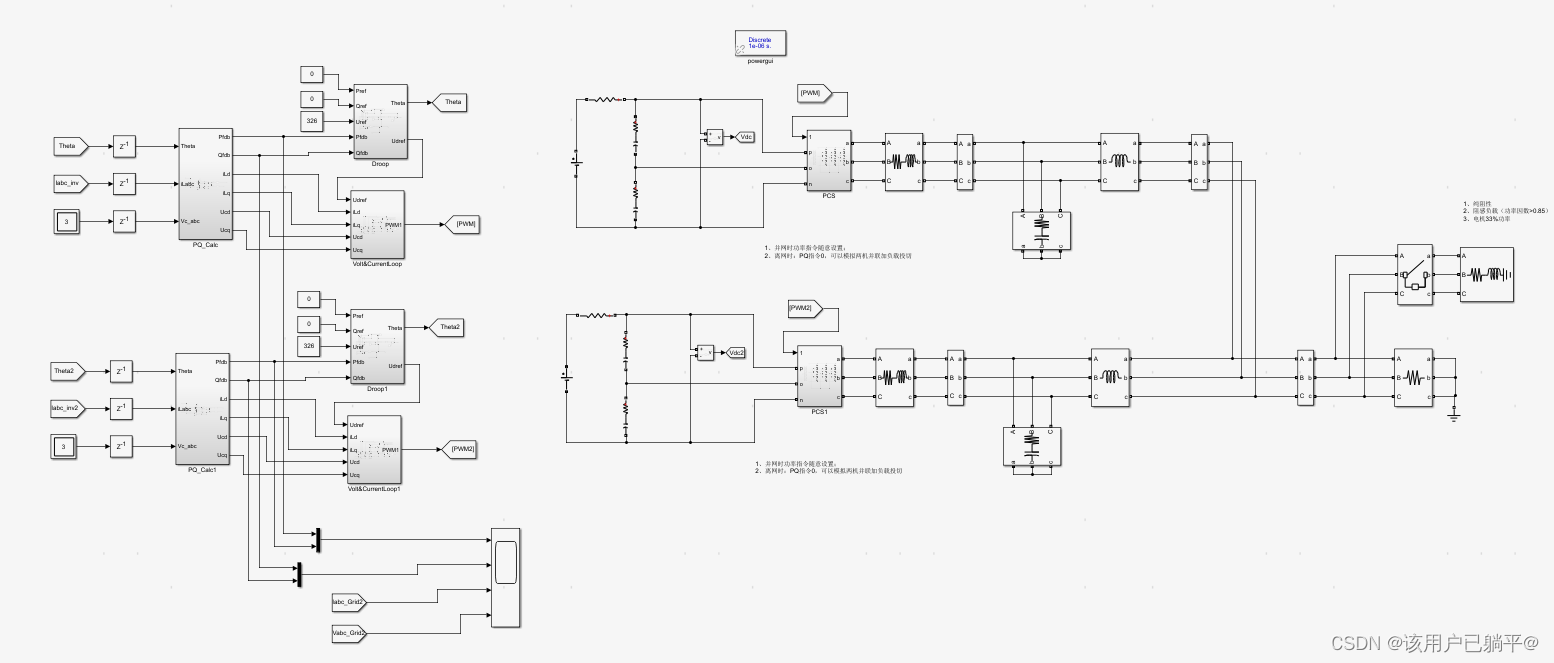
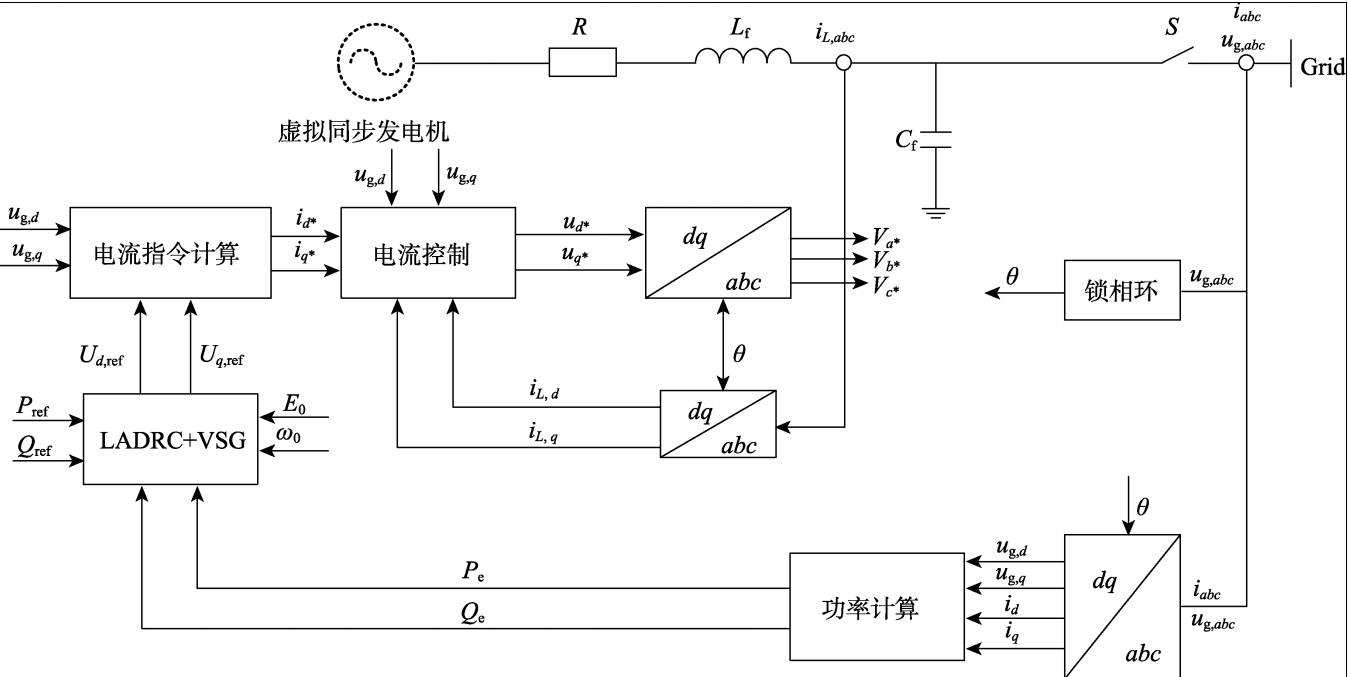
功率计算模块

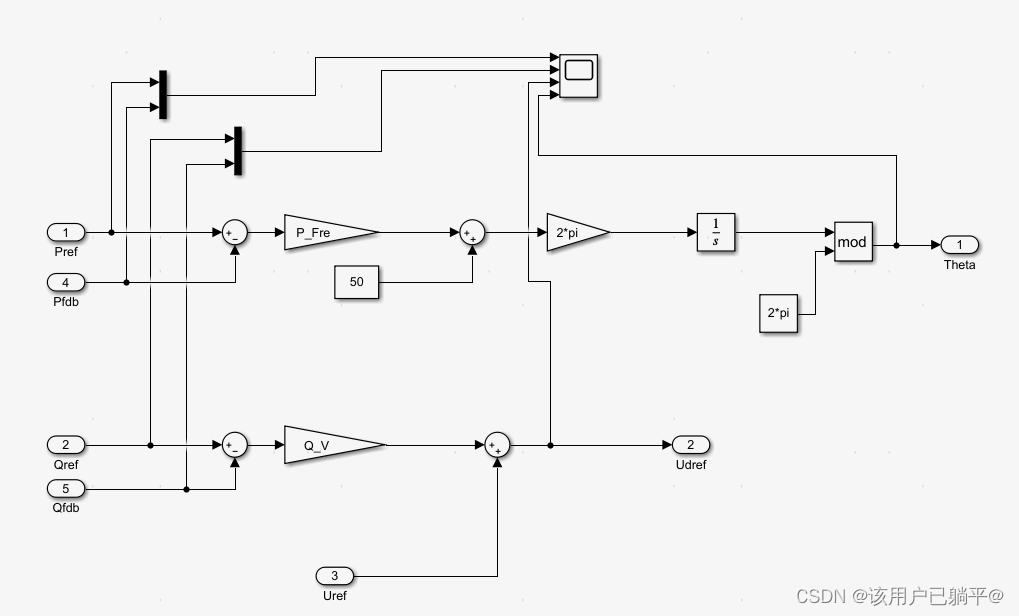
下垂控制模块
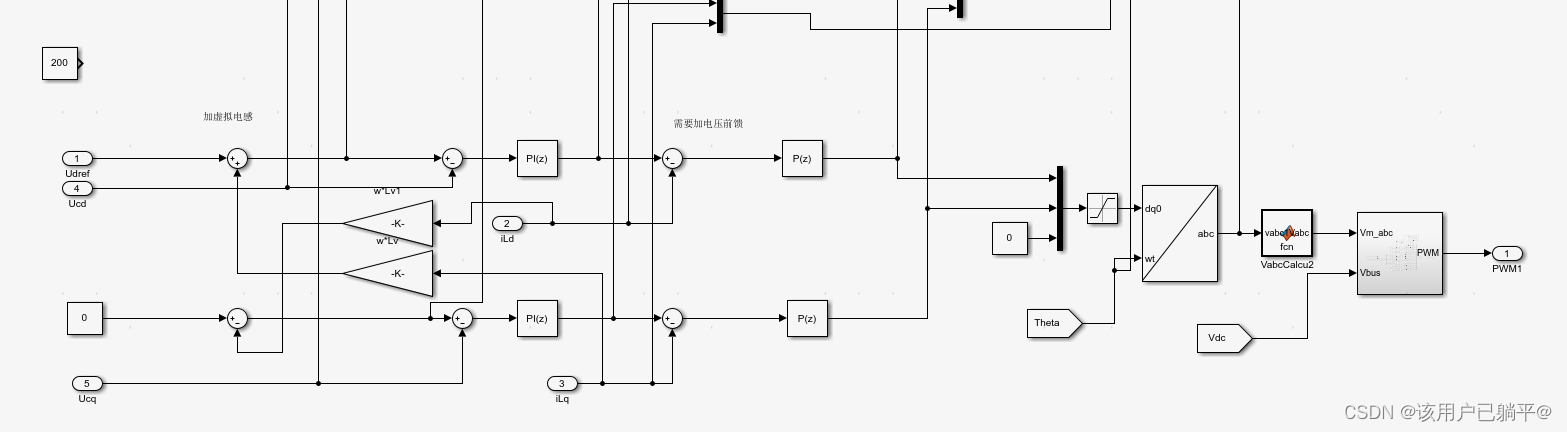
电压电流双环控制模块
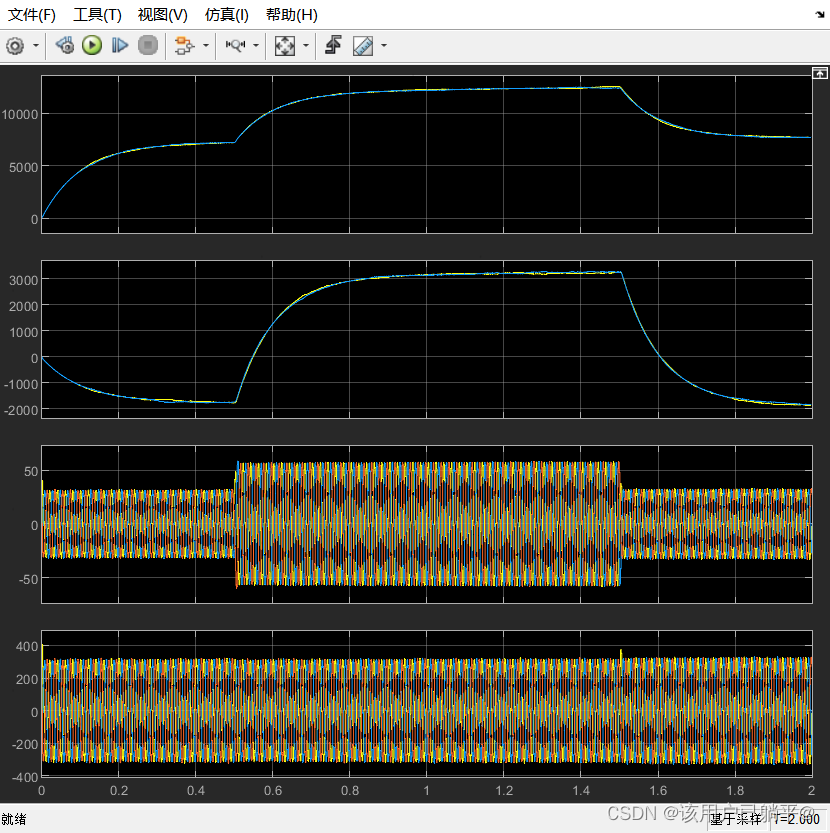
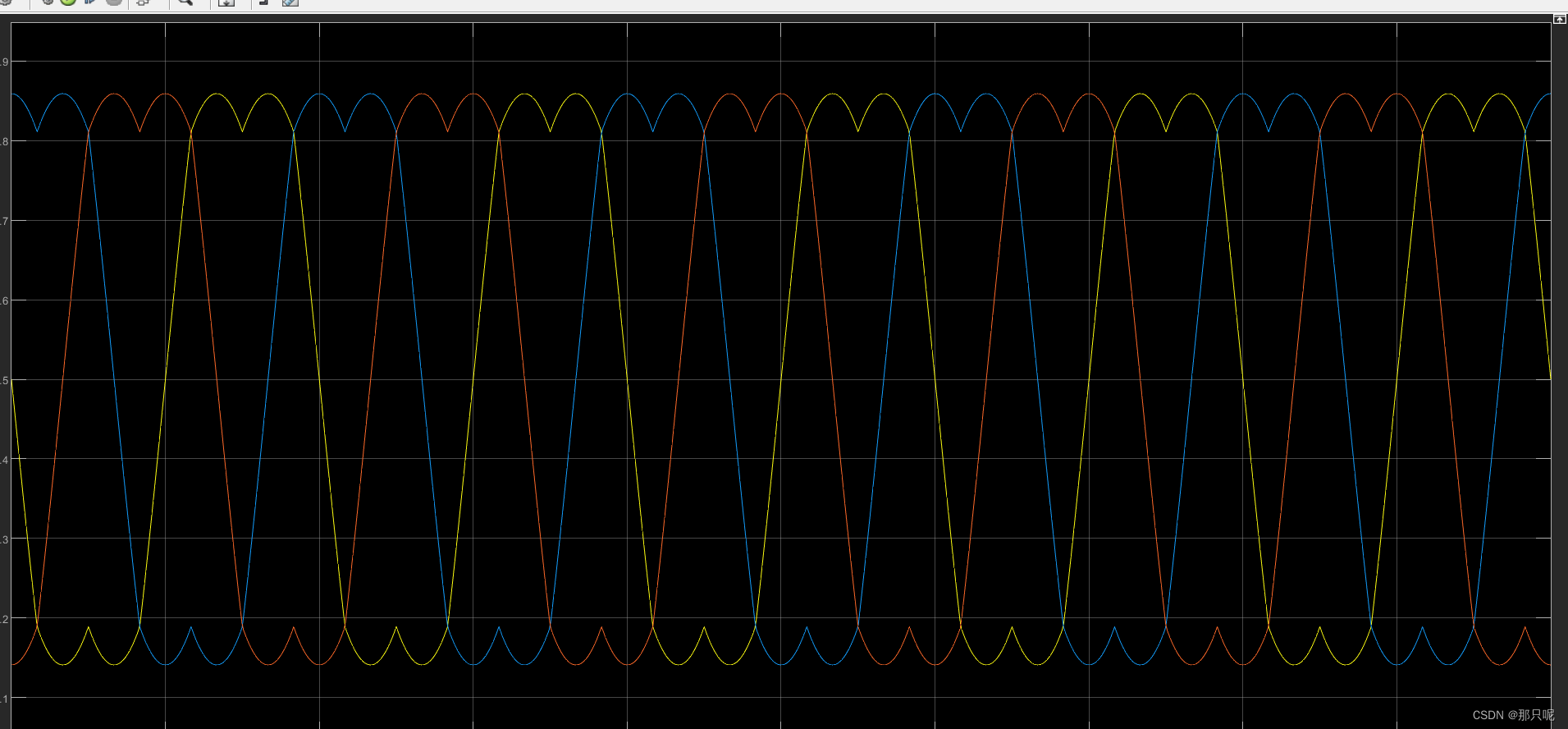
仿真波形:
通道1:两机输出有功,通道2:两机输出无功;通道3:输出总电流;通道4:输出总电压