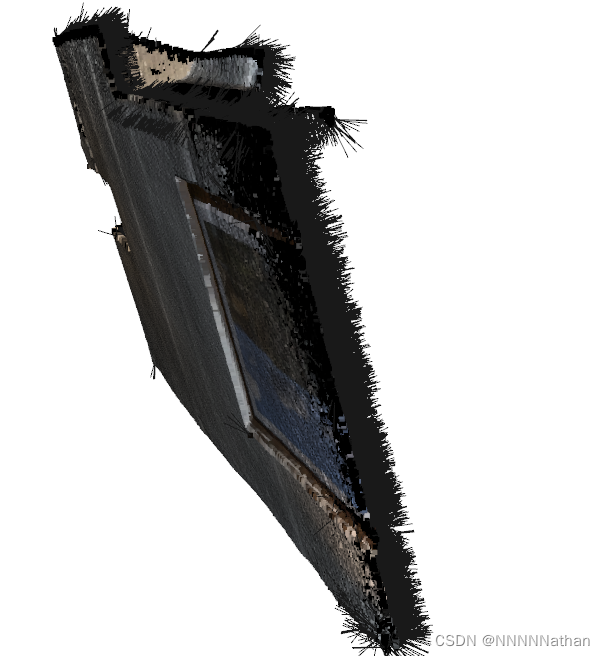
验证点云配准算法时需要模拟噪声,使用open3d和numpy库可以为点云添加高斯噪声
import open3d as o3d
import numpy as np
def add_gaussian_noise(pcd, mean, std):
pcd.points = o3d.utility.Vector3dVector(np.asarray(pcd.points) + np.random.normal(mean, std, size=(len(pcd.points), 3)))
return pcd
pcd = o3d.io.read_point_cloud("cloud.ply")
noisy_pcd = add_gaussian_noise(pcd, 0.0, 0.02)#第三个参数可以设置噪声大小
o3d.io.write_point_cloud("noisy_cloud.ply", noisy_pcd)