#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/objdetect/objdetect.hpp>
#include <opencv2/highgui/highgui.hpp>
#include<vector>
#include<iostream>
#include<queue>
#include<fstream>
cv::Mat marker_mask;
cv::Mat g_markers;
cv::Mat img0, img, img_gray, wshed;
cv::Point_<int> prev_pt(-1, -1);
using std::vector;
using std::queue;
static void my_watershed(cv::Mat img, cv::Mat& markers, int comp_count);
static void my_watershed(cv::Mat img0, cv::Mat& markers, int comp_count)
{
cv::Mat gray = cv::Mat(cv::Size(img0.rows, img0.cols), 8, 1);
cv::cvtColor(img0, gray, CV_BGR2GRAY);
cv::Mat imge = cv::Mat(cv::Size(img0.rows, img0.cols), 8, 1);
cv::Sobel(gray, imge, CV_8U, 1, 1);
vector<queue<cv::Point2i>*>Labeleddata;//图像中各连通区域的点
queue<cv::Point2i>* pque;//某连通区域已包含的点
queue<cv::Point2i> quetem; //用于提取某连通区域中输入种子点中的初始种子点
vector<int*> SeedCounts;
int* Array;
cv::Point2i temp;
int row = imge.rows, col = imge.cols;
cv::Mat marker_saved = markers.clone();
bool up, down, right, left, uplef, uprig, downlef, downrig;
int m, n;
for (int i = 0; i < comp_count; i++)
{
Array = new int[256];
SeedCounts.push_back(Array);//统计某waterlevel的各个连通区域中种子点的个数
pque = new queue<cv::Point2i>[256];
Labeleddata.push_back(pque);//存储该连通区域中种子生长所得的点
}
for (int i = 0; i < row; i++)
for (int j = 0; j < col; j++)
{
if (markers.at<int>(i, j) > 0)
{
temp.x = i;
temp.y = j;
quetem.push(temp);
int num = markers.at<int>(i, j);
markers.at<int>(i, j) = -1;//该点已处理,其他种子点生长时将绕过该点
while (!quetem.empty())
{
up = down = right = left = uplef = uprig = downlef = downrig = false;
temp = quetem.front(); //提取出一个点,在该点的八连通区域内寻找可生长点
m = temp.x;
n = temp.y;
quetem.pop();
if (m - 1 >= 0)//若上方可生长则添加为新种子
{
if (markers.at<int>(m - 1, n) == num)
{
temp.x = m - 1;
temp.y = n;
quetem.push(temp);
markers.at<int>(m - 1, n) = -1;
}
else {
up = true;
}
}
if (m - 1 >= 0 && n - 1 >= 0)
{
if (markers.at<int>(m - 1, n - 1) == num)
{
temp.x = m - 1;
temp.y = n - 1;
quetem.push(temp);
markers.at<int>(m - 1, n - 1) = -1;
}
else {
uplef = true;
}
}
if (m + 1 <= row - 1)
{
if (markers.at<int>(m + 1, n) == num)
{
temp.x = m + 1;
temp.y = n;
quetem.push(temp);
markers.at<int>(m + 1, n) = -1;
}
else {
down = true;
}
}
if (m + 1 <= row - 1 && n + 1 <= col - 1)
{
if (markers.at<int>(m + 1, n + 1) == num)
{
temp.x = m + 1;
temp.y = n + 1;
quetem.push(temp);
markers.at<int>(m + 1, n + 1) = -1;
}
else {
downrig = true;
}
}
if (n + 1 <= col - 1)
{
if (markers.at<int>(m, n + 1) == num)
{
temp.x = m;
temp.y = n + 1;
quetem.push(temp);
markers.at<int>(m, n + 1) = -1;
}
else {
right = true;
}
}
if (m - 1 >= 0 && n + 1 <= col - 1)
{
if (markers.at<int>(m - 1, n + 1) == num)
{
temp.x = m - 1;
temp.y = n + 1;
quetem.push(temp);
markers.at<int>(m - 1, n + 1) = -1;
}
else {
uprig = true;
}
}
if (n - 1 >= 0)
{
if (markers.at<int>(m, n - 1) == num)
{
temp.x = m;
temp.y = n - 1;
quetem.push(temp);
markers.at<int>(m, n - 1) = -1;
}
else {
left = true;
}
}
if (m + 1 <= row - 1 && n - 1 >= 0)
{
if (markers.at<int>(m + 1, n - 1) == num)
{
temp.x = m + 1;
temp.y = n - 1;
quetem.push(temp);
markers.at<int>(m + 1, n - 1) = -1;
}
else {
downlef = true;
}
}
//八连通区域中有未标记点,则该点属于初始种子点
if (up || down || right || left || uplef || downlef || uprig || downrig)
{
temp.x = m;
temp.y = n;
Labeleddata[comp_count - 1][imge.at<uchar>(m, n)].push(temp);
SeedCounts[comp_count - 1][imge.at<uchar>(m, n)]++;
}
}
}
}
bool active;
int waterlevel;
for (waterlevel = 0; waterlevel < 180; waterlevel++)
{
active = true;
while (active) //当1-count_com个连通区域都无可生长点时结束循环
{
active = false;
for (int i = 0; i < comp_count; i++)//将区域i中将waterlevel梯度以下的点用于区域增长
{
//区域增长,经过多次迭代,直至该区域,该waterlevel无可生长点。
if (!Labeleddata[i][waterlevel].empty())
{
active = true;
//SeedCount中保留了前一轮生长后各区域,各waterlevel的种子点个数,
//本轮生长结束后,将根据Labeleddata中的元素个数更新
while (SeedCounts[i][waterlevel] > 0)
{
SeedCounts[i][waterlevel]--;
temp = Labeleddata[i][waterlevel].front();
Labeleddata[i][waterlevel].pop();
m = temp.x;
n = temp.y;
int num = marker_saved.at<int>(m, n);
if (m - 1 >= 0)
{
if (!marker_saved.at<int>(m - 1, n))//上方点未处理过
{
temp.x = m - 1;
temp.y = n;
marker_saved.at<int>(m - 1, n) = num;
if (imge.at<uchar>(m - 1, n) <= waterlevel)
Labeleddata[i][waterlevel].push(temp);
else {
//本次生长不处理,可能在waterlevel变化到某值时再用于生长
Labeleddata[i][imge.at<uchar>(m - 1, n)].push(temp);
SeedCounts[i][imge.at<uchar>(m - 1, n)]++;
}
}
}
if (m + 1 <= row - 1)
{
if (!marker_saved.at<int>(m + 1, n))
{
temp.x = m + 1;
temp.y = n;
marker_saved.at<int>(m + 1, n) = num;
if (imge.at<uchar>(m + 1, n) <= waterlevel)
Labeleddata[i][waterlevel].push(temp);
else {
Labeleddata[i][imge.at<uchar>(m + 1, n)].push(temp);
SeedCounts[i][imge.at<uchar>(m + 1, n)]++;
}
}
}
if (n + 1 <= col - 1)
{
if (!marker_saved.at<int>(m, n + 1))
{
temp.x = m;
temp.y = n + 1;
marker_saved.at<int>(m, n + 1) = num;
if (imge.at<uchar>(m, n + 1) <= waterlevel)
Labeleddata[i][waterlevel].push(temp);
else {
Labeleddata[i][imge.at<uchar>(m, n + 1)].push(temp);
SeedCounts[i][imge.at<uchar>(m, n + 1)]++;
}
}
}
if (n - 1 >= 0)
{
if (!marker_saved.at<int>(m, n - 1))
{
temp.x = m;
temp.y = n - 1;
marker_saved.at<int>(m, n - 1) = num;
if (imge.at<uchar>(m, n - 1) <= waterlevel)
Labeleddata[i][waterlevel].push(temp);
else
{
Labeleddata[i][imge.at<uchar>(m, n - 1)].push(temp);
SeedCounts[i][imge.at<uchar>(m, n - 1)]++;
}
}
}
}
SeedCounts[i][waterlevel] = Labeleddata[i][waterlevel].size();
}
}
}
}
markers = marker_saved.clone();
}
static void mouse_event(int event, int x, int y, int flags, void*)
{
if (img.rows == 0)
return;
if (event == CV_EVENT_LBUTTONUP || !(flags&CV_EVENT_FLAG_LBUTTON))
prev_pt = cv::Point_<int>(-1, -1);
else if (event == CV_EVENT_LBUTTONDOWN)
prev_pt = cv::Point2i(x, y);
else if (event == CV_EVENT_MOUSEMOVE && (flags&CV_EVENT_FLAG_LBUTTON))
{
cv::Point2i pt(x, y);
if (prev_pt.x < 0)
prev_pt = pt;
cv::line(marker_mask, prev_pt, pt, cv::Scalar(255, 255, 255), 1, 8, 0);
cv::line(img, prev_pt, pt, cv::Scalar(255, 255, 255), 1, 8, 0);
prev_pt = pt;
cv::imshow("image", img);
}
}
int main()
{
img0 = cv::imread("D:/0.png", 1);
img = img0.clone();
CvRNG rng = cvRNG(-1);
img_gray = img0.clone();
wshed = img0.clone();
marker_mask = cv::Mat(cv::Size(img0.cols, img0.rows), 8, 1);
g_markers = cv::Mat(cv::Size(img0.cols, img0.rows), CV_32S, 1);
cv::cvtColor(img, marker_mask, CV_BGR2GRAY);
cv::cvtColor(marker_mask, img_gray, CV_GRAY2BGR);
for (int i = 0; i < marker_mask.rows; i++)
for (int j = 0; j < marker_mask.cols; j++)
marker_mask.at<unsigned char>(i, j) = 0;
for (int i = 0; i < g_markers.rows; i++)
for (int j = 0; j < g_markers.cols; j++)
g_markers.at<int>(i, j) = 0;
cv::imshow("image", img);
cv::imshow("watershed transform", wshed);
cv::setMouseCallback("image", mouse_event, 0);
for (;;)
{
int c = cv::waitKey(0);
if ((char)c == 27)
break;
if ((char)c == 'r')
{
for (int i = 0; i < marker_mask.rows; i++)
for (int j = 0; j < marker_mask.cols; j++)
marker_mask.at<unsigned char>(i, j) = 0;
img0.copyTo(img);
cv::imshow("image", img);
}
if ((char)c == 'w' || (char)c == ' ')
{
vector<vector<cv::Point>> contours;
CvMat* color_tab = 0;
int comp_count = 0;
cv::findContours(marker_mask, contours, CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE, cv::Point(0, 0));
for (int i = 0; i < g_markers.rows; i++)
for (int j = 0; j < g_markers.cols; j++)
g_markers.at<int>(i, j) = 0;
vector<vector<cv::Point> >::iterator iter = contours.begin();
for (int i = 0; i < (int)contours.size(); i++)
{
cv::drawContours(g_markers, contours, i, cv::Scalar::all(comp_count + 1),
1, 8, vector<cv::Vec4i>());
comp_count++;
}
if (comp_count == 0)
continue;
color_tab = cvCreateMat(1, comp_count, CV_8UC3);
for (int i = 0; i < comp_count; i++)
{
uchar* ptr = color_tab->data.ptr + i * 3;
ptr[0] = (uchar)(cvRandInt(&rng) % 180 + 50);
ptr[1] = (uchar)(cvRandInt(&rng) % 180 + 50);
ptr[2] = (uchar)(cvRandInt(&rng) % 180 + 50);
}
cv::Mat temp = g_markers.clone();
double t = (double)cvGetTickCount();
//my_watershed(img0,g_markers,comp_count);
cv::watershed(img0, g_markers);
t = (double)cvGetTickCount() - t;
std::cout << "exec time= " << t / (cvGetTickFrequency()*1000.) << std::endl;
for (int i = 0; i < g_markers.rows; i++)
for (int j = 0; j < g_markers.cols; j++)
{
int idx = g_markers.at<int>(i, j);
uchar* dst = &wshed.at<uchar>(i, j * 3);
if (idx == -1)
dst[0] = dst[1] = dst[2] = (uchar)255;
else if (idx <= 0 || idx > comp_count)
dst[0] = dst[1] = dst[2] = (uchar)8;
else {
uchar* ptr = color_tab->data.ptr + (idx - 1) * 3;
dst[0] = ptr[0]; dst[1] = ptr[1]; dst[2] = ptr[2];
}
}
cv::addWeighted(wshed, 0.5, img_gray, 0.5, 0, wshed);
cv::imshow("watershed transform", wshed);
cvReleaseMat(&color_tab);
}
}
return 0;
}
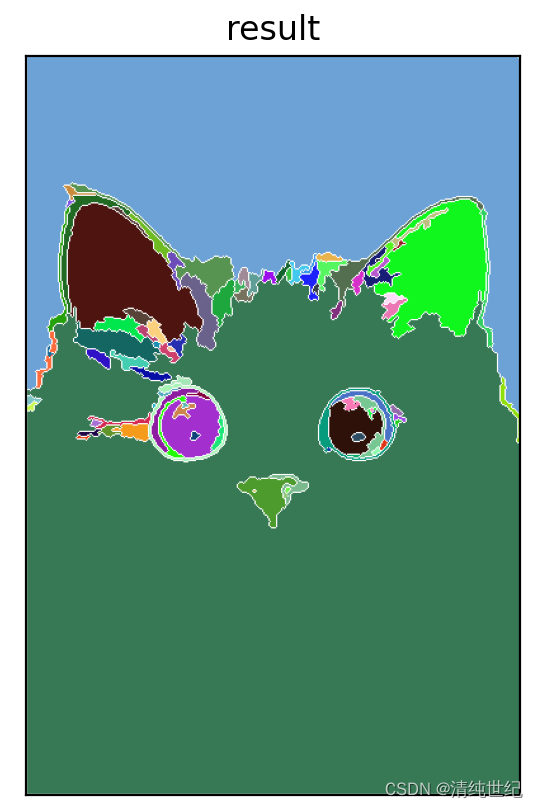
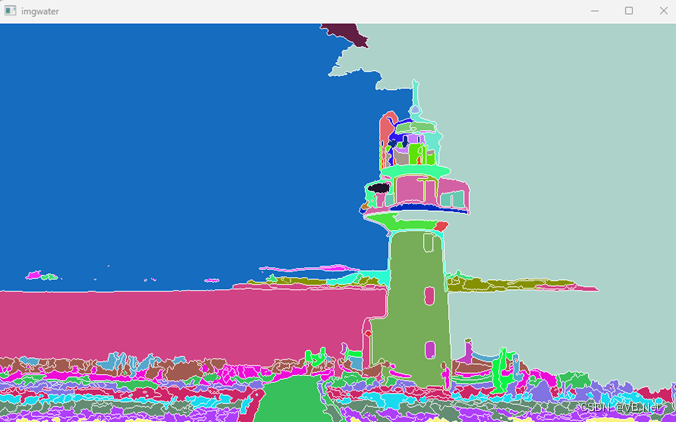
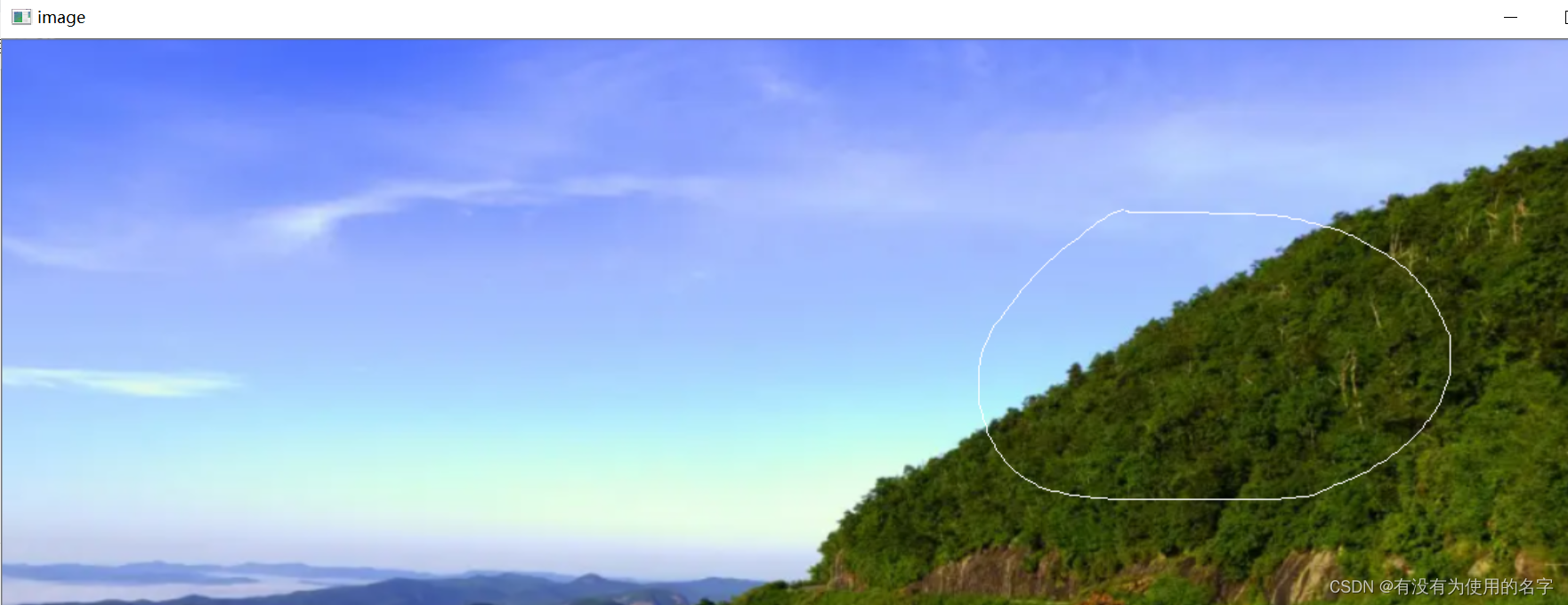
运行效果:

还有一种方法:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
using namespace cv;
using namespace std;
#define WINDOW_NAME1 "【程序窗口】" //为窗口标题定义的宏
#define WINDOW_NAME2 "【分水岭算法效果图】" //为窗口标题定义的宏
Mat g_maskImage, g_srcImage;
Point prevPt(-1, -1);
static void ShowHelpText()
{
printf("\n\n\n\t欢迎来到【分水岭算法】示例程序~\n\n");
printf("\t请先用鼠标在图片窗口中标记出大致的区域,\n\n\t然后再按键【1】或者【SPACE】启动算法。"
"\n\n\t按键操作说明: \n\n"
"\t\t键盘按键【1】或者【SPACE】- 运行的分水岭分割算法\n"
"\t\t键盘按键【2】- 恢复原始图片\n"
"\t\t键盘按键【ESC】- 退出程序\n\n\n");
}
static void on_Mouse(int event, int x, int y, int flags, void*)
{
//处理鼠标不在窗口中的情况
if (x < 0 || x >= g_srcImage.cols || y < 0 || y >= g_srcImage.rows)
return;
//处理鼠标左键相关消息
if (event == EVENT_LBUTTONUP || !(flags & EVENT_FLAG_LBUTTON))
prevPt = Point(-1, -1);
else if (event == EVENT_LBUTTONDOWN)
prevPt = Point(x, y);
//鼠标左键按下并移动,绘制出白色线条
else if (event == EVENT_MOUSEMOVE && (flags & EVENT_FLAG_LBUTTON))
{
Point pt(x, y);
if (prevPt.x < 0)
prevPt = pt;
line(g_maskImage, prevPt, pt, Scalar::all(255), 5, 8, 0);
line(g_srcImage, prevPt, pt, Scalar::all(255), 5, 8, 0);
prevPt = pt;
imshow(WINDOW_NAME1, g_srcImage);
}
}
int main(int argc, char** argv)
{
//【0】显示帮助文字
ShowHelpText();
//【1】载入原图
g_srcImage = imread("D:/0.jpg");
imshow(WINDOW_NAME1, g_srcImage);
Mat srcImage, grayImage;
g_srcImage.copyTo(srcImage);
cvtColor(g_srcImage, g_maskImage, COLOR_BGR2GRAY);
cvtColor(g_maskImage, grayImage, COLOR_GRAY2BGR);
g_maskImage = Scalar::all(0);
//【2】设置鼠标回调函数
setMouseCallback(WINDOW_NAME1, on_Mouse, 0);
//【3】轮询按键,进行处理
while (1)
{
//获取键值
int c = waitKey(0);
//若按键键值为ESC时,退出
if ((char)c == 27)
break;
//按键键值为2时,恢复源图
if ((char)c == '2')
{
g_maskImage = Scalar::all(0);
srcImage.copyTo(g_srcImage);
imshow(WINDOW_NAME1, g_srcImage);
}
//若检测到按键值为1或者空格,则进行处理
if ((char)c == '1' || (char)c == ' ')
{
//定义一些参数
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
//寻找轮廓
findContours(g_maskImage, contours, hierarchy, RETR_CCOMP, CHAIN_APPROX_SIMPLE);
//轮廓为空时的处理
if (contours.empty() || hierarchy.size() == 0)
continue;
int compCount = hierarchy.size();
// 拷贝掩膜
Mat maskImage(g_maskImage.size(), CV_32S);
maskImage = Scalar::all(0);
// 循环绘制出轮廓
for (int index = 0; index < hierarchy.size(); index++)
drawContours(maskImage, contours, index, Scalar::all(index + 1), -1, 8, hierarchy, INT_MAX);
// 生成随机颜色
vector<Vec3b> colorTab;
for (int i = 0; i < compCount; i++)
{
int b = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int r = theRNG().uniform(0, 255);
colorTab.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
// 计算处理时间并输出到窗口中
watershed(srcImage, maskImage);
//双层循环,将分水岭图像遍历存入watershedImage中
Mat watershedImage(maskImage.size(), CV_8UC3);
for (int i = 0; i < maskImage.rows; i++)
for (int j = 0; j < maskImage.cols; j++)
{
int index = maskImage.at<int>(i, j);
if (index == -1)
watershedImage.at<Vec3b>(i, j) = Vec3b(255, 255, 255);
else if (index <= 0 || index > compCount)
watershedImage.at<Vec3b>(i, j) = Vec3b(0, 0, 0);
else
watershedImage.at<Vec3b>(i, j) = colorTab[index - 1];
}
//imshow("1", watershedImage);
//imshow("2", grayImage);
//混合灰度图和分水岭效果图并显示最终的窗口
//watershedImage = watershedImage * 0.5 + grayImage * 0.5;
addWeighted(watershedImage, 0.5, grayImage, 0.5, 0, watershedImage);
imshow(WINDOW_NAME2, watershedImage);
}
}
return 0;
}