gym版本是0.26.1
CartPole-v1的详细信息,点链接里看就行了。
修改了下动手深度强化学习对应的代码。
然后这里 J ( θ ) J(\theta) J(θ)梯度上升更新的公式是用的不严谨的,这个和王树森书里讲的严谨公式有点区别。
代码
import gym
import torch
from torch import nn
from torch.nn import functional as F
import numpy as np
import matplotlib.pyplot as plt
from tqdm import tqdm
import rl_utils # 这个要下载源码,然后放到同个文件目录下,链接在上面给出了
from d2l import torch as d2l # 这个是动手深度学习的库, pip/conda install d2l 就好了
class PolicyNet(nn.Module):
def __init__(self, state_dim, hidden_dim, action_dim):
super().__init__()
self.fc1 = nn.Linear(state_dim, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, action_dim)
def forward(self, X):
X = F.relu(self.fc1(X))
return F.softmax(self.fc2(X),dim=1)
class REINFORCE:
def __init__(self, state_dim, hidden_dim, action_dim, learning_rate, gamma, device):
self.policy_net = PolicyNet(state_dim, hidden_dim, action_dim).to(device)
self.optimizer = torch.optim.Adam(self.policy_net.parameters(), lr = learning_rate)
self.gamma = gamma # 折扣因子
self.device = device
def take_action(self, state): # 根据动作概率分布随机采样
state = torch.tensor(np.array([state]),dtype=torch.float).to(self.device)
probs = self.policy_net(state)
action_dist = torch.distributions.Categorical(probs)
action = action_dist.sample()
return action.item()
def update(self, transition_dict): # 公式用的是简化推导
reward_list = transition_dict['rewards']
state_list = transition_dict['states']
action_list = transition_dict['actions']
G = 0
self.optimizer.zero_grad()
for i in reversed(range(len(reward_list))): # 从最后一步算起
reward = reward_list[i]
state = torch.tensor(np.array([state_list[i]]), dtype=torch.float).to(self.device)
action = torch.tensor([action_list[i]]).reshape(-1,1).to(self.device)
log_prob = torch.log(self.policy_net(state).gather(1, action))
G = self.gamma * G + reward
loss = -log_prob * G # 因为梯度更新是减的,所以取个负号
loss.backward()
self.optimizer.step()
lr = 1e-3
num_episodes = 1000
hidden_dim = 128
gamma = 0.98
device = d2l.try_gpu()
env_name="CartPole-v1"
env = gym.make(env_name)
print(f"_max_episode_steps:{
env._max_episode_steps}")
torch.manual_seed(0)
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
agent = REINFORCE(state_dim, hidden_dim, action_dim, lr, gamma, device)
return_list = []
for i in range(10):
with tqdm(total=int(num_episodes/10), desc=f'Iteration {
i}') as pbar:
for i_episode in range(int(num_episodes/10)):
episode_return = 0
transition_dict = {
'states': [], 'actions': [], 'next_states': [], 'rewards': [], 'dones': []}
state = env.reset()[0]
done, truncated= False, False
while not done and not truncated : # 主要是这部分和原始的有点不同
action = agent.take_action(state)
next_state, reward, done, truncated, info = env.step(action)
transition_dict['states'].append(state)
transition_dict['actions'].append(action)
transition_dict['next_states'].append(next_state)
transition_dict['rewards'].append(reward)
transition_dict['dones'].append(done)
state = next_state
episode_return += reward
return_list.append(episode_return)
agent.update(transition_dict)
if (i_episode+1) % 10 == 0:
pbar.set_postfix({
'episode': '%d' % (num_episodes / 10 * i + i_episode+1),
'return': '%.3f' % np.mean(return_list[-10:])})
pbar.update(1)
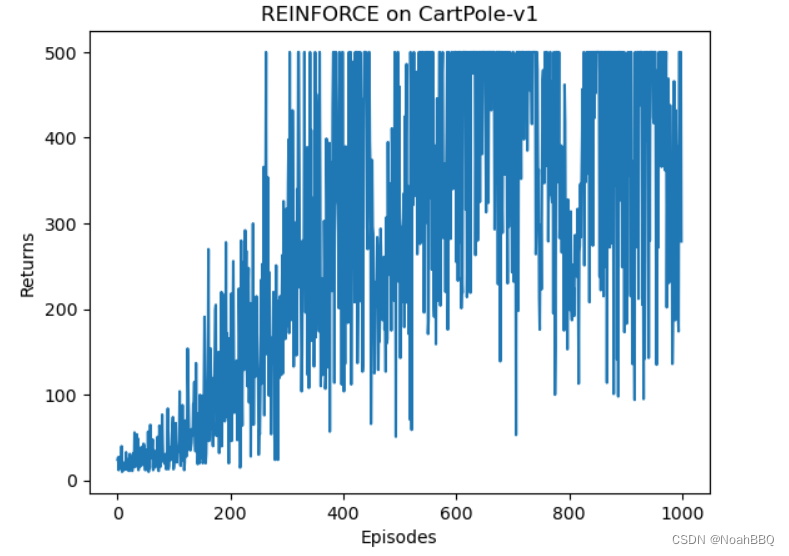
episodes_list = list(range(len(return_list)))
plt.plot(episodes_list, return_list)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title(f'REINFORCE on {
env_name}')
plt.show()
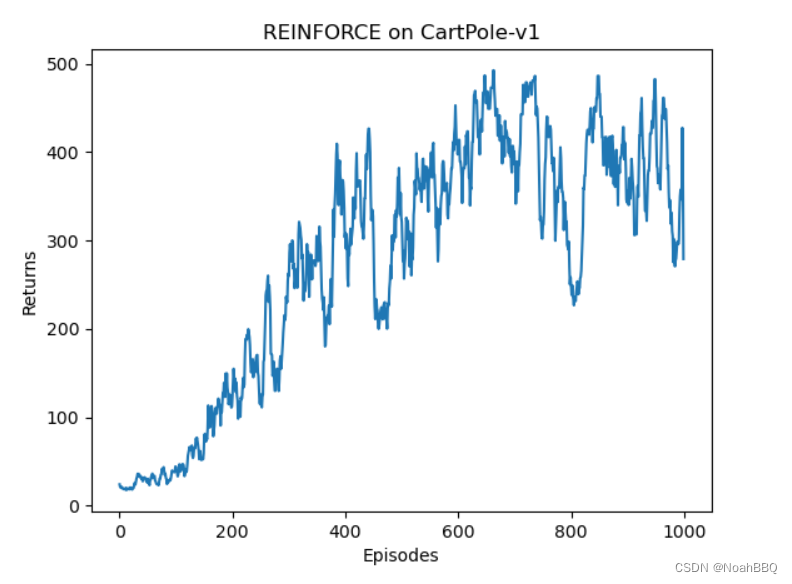
mv_return = rl_utils.moving_average(return_list, 9)
plt.plot(episodes_list, mv_return)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title(f'REINFORCE on {
env_name}')
plt.show()
我是在jupyter里直接跑的,结果如下所示。